También podría gustarte
- Cadena de MediciónDocumento5 páginasCadena de MediciónDavid ReyesAún no hay calificaciones
- TrucajeDocumento12 páginasTrucajePool Geovanny Avila GarciaAún no hay calificaciones
- Practica CabezoteDocumento7 páginasPractica CabezoteJoher Joher Joher0% (1)
- Capacidad de AceleracionDocumento12 páginasCapacidad de AceleracionJhonnatan SanchezAún no hay calificaciones
- Ajuste y Reglaje de La Geometría de La DirecciónDocumento9 páginasAjuste y Reglaje de La Geometría de La DirecciónSebastian CoraisacaAún no hay calificaciones
- Sistema de Lubricación de Un MciaDocumento24 páginasSistema de Lubricación de Un MciaVerónica ViteriAún no hay calificaciones
- Información General ToberasDocumento8 páginasInformación General ToberasYe Ph0% (1)
- Guia 6 Caja de Cambios Manual SimplificadaDocumento7 páginasGuia 6 Caja de Cambios Manual SimplificadaJean Carlos CabreraAún no hay calificaciones
- Interpretación de Las Magnitudes Eléctricas Utilizadas en El Campo AutomotrizDocumento3 páginasInterpretación de Las Magnitudes Eléctricas Utilizadas en El Campo AutomotrizSanti SarangoAún no hay calificaciones
- Investigación Del Instructivo de RTV en ElDocumento2 páginasInvestigación Del Instructivo de RTV en ElJEAN CARLOS COLOMA ROLDANAún no hay calificaciones
- Tipos de Lubricacion en El MotorDocumento7 páginasTipos de Lubricacion en El Motorcamaney9089Aún no hay calificaciones
- Reglaje de TaquésDocumento6 páginasReglaje de TaquésMaximo Miranda VeraAún no hay calificaciones
- Guia Laboratorio 7Documento9 páginasGuia Laboratorio 7Jhon LozadaAún no hay calificaciones
- GlosarioDocumento9 páginasGlosariojesus david lugoAún no hay calificaciones
- Prueba de Vacio en Motor EstacionarioDocumento3 páginasPrueba de Vacio en Motor EstacionarioFernando CastellanosAún no hay calificaciones
- Toapanta Andres Ta 4BM T12Documento22 páginasToapanta Andres Ta 4BM T12Andres ToapantaAún no hay calificaciones
- Comprobacion de Conicidad y Ovalamiento Del CiguenalDocumento9 páginasComprobacion de Conicidad y Ovalamiento Del CiguenalSebastián GarcésAún no hay calificaciones
- CarterDocumento3 páginasCarterBernardoAún no hay calificaciones
- Informe 5 Reconocimiento de Las Partes y Puesta A Punto Del CarburadorDocumento17 páginasInforme 5 Reconocimiento de Las Partes y Puesta A Punto Del CarburadorOlger Baño TuquerresAún no hay calificaciones
- Exposicion Viernes Opacimetro y Analizador de GasesDocumento25 páginasExposicion Viernes Opacimetro y Analizador de GasesGroverContrerasAún no hay calificaciones
- Sensor de Temperatura de Cabeza de Cilindros Ford F150Documento4 páginasSensor de Temperatura de Cabeza de Cilindros Ford F150Patricio ValenciaAún no hay calificaciones
- Informe Sistema de FrenosDocumento18 páginasInforme Sistema de FrenosAndres Rodriguez0% (1)
- Alineación de Un Vehículo InformeDocumento6 páginasAlineación de Un Vehículo InformeronaldoAún no hay calificaciones
- Reloj PalpadorDocumento17 páginasReloj PalpadorGeovanny JácomeAún no hay calificaciones
- Examen Resuelto2005Documento5 páginasExamen Resuelto2005Brad MogrovejoAún no hay calificaciones
- 1.1 Ley de OhmDocumento7 páginas1.1 Ley de OhmJAIME19290% (1)
- Informe Tecnico Bomba Crdi, Actuadores Inyeccion DieselDocumento22 páginasInforme Tecnico Bomba Crdi, Actuadores Inyeccion DieselMiguel Angel Gallardo BastidasAún no hay calificaciones
- Normas Tipográficas para La Presentación e Impresión de Trabajos de GradoDocumento13 páginasNormas Tipográficas para La Presentación e Impresión de Trabajos de GradoValentina MendozaAún no hay calificaciones
- Componentes de La DirecciónDocumento16 páginasComponentes de La DirecciónAlbertoSanchezAún no hay calificaciones
- Cojinetes de Contacto Deslizante y LubricaciónDocumento50 páginasCojinetes de Contacto Deslizante y LubricaciónJohn Flores ramosAún no hay calificaciones
- Deber Ejercicio 3-14 Teoria de Mecanismo Bryan SimbañaDocumento5 páginasDeber Ejercicio 3-14 Teoria de Mecanismo Bryan SimbañaGabriel SimbañaAún no hay calificaciones
- Preguntas Frecuentes Al Mecánico - Taller Mecánico AutomotrizDocumento7 páginasPreguntas Frecuentes Al Mecánico - Taller Mecánico AutomotrizKarlitosman0% (1)
- Elevador Hidraulico Super FinalDocumento41 páginasElevador Hidraulico Super FinalFranko Fabian Guzman HerbasAún no hay calificaciones
- Sistema de Encendido de Un Vehículo A GasolinaDocumento10 páginasSistema de Encendido de Un Vehículo A GasolinaXavier HidalgoAún no hay calificaciones
- Árbol de LevasDocumento5 páginasÁrbol de LevasEduardo GQAún no hay calificaciones
- Trucaje Del MotorDocumento19 páginasTrucaje Del MotorLuis SilvaAún no hay calificaciones
- Mantenimiento de La Transmisión Manual y AutomaticaDocumento6 páginasMantenimiento de La Transmisión Manual y AutomaticaNephtali Ramirez CastrejonAún no hay calificaciones
- Informe Dinamometro Prueba de PotenciaDocumento9 páginasInforme Dinamometro Prueba de PotenciaWaldo ContrerasAún no hay calificaciones
- Cuál Es La Fabricación de Las Pastillas y Zapatas de FrenosDocumento2 páginasCuál Es La Fabricación de Las Pastillas y Zapatas de FrenosDionel De La Cruz100% (1)
- 3 Examen Complexivo Práctico Caso 3 CalidadDocumento23 páginas3 Examen Complexivo Práctico Caso 3 CalidadVictor Robles Romero100% (1)
- Flujo de Las Fallas y Soluciones en El Sistema de CargaDocumento1 páginaFlujo de Las Fallas y Soluciones en El Sistema de CargaMarco Alban0% (1)
- Practica Bomba GasolinaDocumento22 páginasPractica Bomba GasolinaDavid JuarezAún no hay calificaciones
- Fallas de Las Bombas HidraulicasDocumento27 páginasFallas de Las Bombas HidraulicasAlexander SanzAún no hay calificaciones
- Tema 2Documento70 páginasTema 2Jose Luis A. Navarro100% (1)
- Reguladores de Avance Al EncendidoDocumento8 páginasReguladores de Avance Al Encendidochara_07_14Aún no hay calificaciones
- EmbraguesDocumento6 páginasEmbraguesjeferson0% (1)
- Informe Control de Emisiones. AT5102Documento12 páginasInforme Control de Emisiones. AT5102Héctor CangásAún no hay calificaciones
- Guia Sistemas de InyeccionDocumento8 páginasGuia Sistemas de InyeccionFernando Calderon SanchezAún no hay calificaciones
- Engranaje PlanetarioDocumento12 páginasEngranaje PlanetarioKEVIN DALI LARGO MEJIAAún no hay calificaciones
- Reductor GNV 2Documento11 páginasReductor GNV 2alejandroAún no hay calificaciones
- Informe 1 Dinámica Del AutomóvilDocumento11 páginasInforme 1 Dinámica Del AutomóvilDíaz CarlosAún no hay calificaciones
- Reparación de La Cabeza Del MotorDocumento5 páginasReparación de La Cabeza Del MotorCiber The Joker0% (1)
- Cargas en La Carroceria de Un BusDocumento1 páginaCargas en La Carroceria de Un BusCRISTOPHERAún no hay calificaciones
- Manejo Del Multimetro Digital Automotriz Cie 8088Documento9 páginasManejo Del Multimetro Digital Automotriz Cie 8088Kevin Rene Maita LoayzaAún no hay calificaciones
- Selección de Material de Partida para El Pistón ForjaDocumento2 páginasSelección de Material de Partida para El Pistón ForjaFernando Jimenez GandarillasAún no hay calificaciones
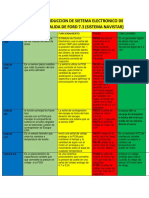
- Matriz de Inducción de Dispositivos de Entada y Salida Del Motor FORD 7.3LDocumento2 páginasMatriz de Inducción de Dispositivos de Entada y Salida Del Motor FORD 7.3LGustavo Sánchez67% (3)
- Sensor AcelerometroDocumento4 páginasSensor AcelerometroJeisson AlfonsoAún no hay calificaciones
- Pre Informe - Laboratorio 5 AcelerometroDocumento4 páginasPre Informe - Laboratorio 5 AcelerometroAnca117 AAún no hay calificaciones
- Practica 6Documento14 páginasPractica 6Luis SantacruzAún no hay calificaciones
- Picaduradeanimalesponzoosos 090323114230 Phpapp02 PDFDocumento44 páginasPicaduradeanimalesponzoosos 090323114230 Phpapp02 PDFRaul Garcia AdameAún no hay calificaciones
- Reporte de Practicás AcelerometroDocumento3 páginasReporte de Practicás AcelerometroRaul Garcia AdameAún no hay calificaciones
- PRÁCTICA No 3 MAQUINAS CNC DE TU LABORATORI PDFDocumento29 páginasPRÁCTICA No 3 MAQUINAS CNC DE TU LABORATORI PDFRaul Garcia Adame100% (1)
- PRACTICA No 1 PROCESOS DE MAQUINADO PDFDocumento39 páginasPRACTICA No 1 PROCESOS DE MAQUINADO PDFRaul Garcia AdameAún no hay calificaciones