Proyecto Final: Electrnica Digital.
Mini Sumo
Realizado por: Karem Heredia Quito. Curso: 4D Electrnica
III. MATERIALES
I. INTRODUCCION
Un robot mini sumo es una mquina diseada y
programada capaz de localizar, seguir, empujar, y tirar a
su oponente de similares caractersticas, por medio de
sensores infrarrojos adems de mantenerse dentro de la
plataforma de batalla Dohyo.
Para el robot se ha utilizado componentes tales como un
switch para el prendido y apagado del robot al inicio de
cada combate por seguridad, dos servomotores truncados
para un mayor torque controlados mediante dos sensores
infrarrojos CNY70, y el inversor de giro o puente H L293D
para que de esta manera pueda realizar giros de derecha
izquierda y de izquierda a derecha de adelante y hacia atrs,
adems este debe ser autnomo.
II. OBJETIVOS
Objetivo General:
-Construir un robot para Mini Sumo, rpido y gil que
presente diversas formas de reaccionar, de acuerdo a la
posicin en la que se encuentre, acatando las normas
establecidas en el reglamento.
atacar alun
-Construir
surobot
oponente
mini sumo
para
capaz de detectar y atacar al su
oponente para sacarlo de la plataforma de batalla.
plataforma
-Mantener
al robot
de batalla
mini sumo
por
dentro
medio
de lade
plataforma de
batalla por medio dela implementacin de sensores.
Objetivos Especficos:
ser controlado manualmente
-Plantearse las distintas acciones que realizara el robot para
presentarlo como un robot gil y de competencia.
- Disear el circuito que permita lo enunciado anteriormente.
- Disear el lenguaje de programacin adecuado para el
funcionamiento del circuito establecido.
- Disear la estructura del robot teniendo en cuenta las normas
de estructura.
- Investigar los diferentes sensores a utilizarse, para tener claro
su funcionamiento y aprovechar de esto, para un rendimiento
ptimo de los mismos.
- Conseguir los elementos tanto mecnicos como electrnicos
para la construccin del robot.
-Realizar las pruebas necesarias para garantizar el
funcionamiento del robot.
- Presentar el robot en funcionamiento para que pueda acceder
a competir.
Tarjeta Basys 2.
Computador.
Software ISE de XILINX para el lenguaje
VHDL.
Adept de Digilent.
Un sensor Sharp
3 sensores infrarrojos CNY70
Un driver.
4 optoacopladores 4n25
Un 7805
2 servomotores truncados
Un inversor de giro o puente H L293D
Componentes varios (resistencias varias, diodos)
Una fuente recargable de 9V
Una fuente recargable de 3.6V.
Estructura para robot minisumo:
Soporte para micro motor.
Ruedas de mini sumo
IV. DESCRIPCIN
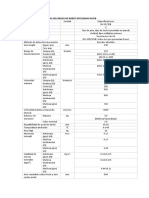
ESPECIFICACIONES DEL ROBOT
Usadas:
Modelo
del
El
Robot
con
10cmx
quedo
en
10cmx15cm
Mximo
0,4Kg
todas
sus
con
bateras
piezas,
y
acc
Dimensiones Usadas: El Modelo del Robot quedo con 10cmx
10cmx15cm en el cual entraron todos los componentes.
Peso: Mximo 0,4Kg con todas sus piezas, bateras y
accesorios incluidos, sin tolerancia.
Peso Usado: El modelo sumando Bateras, Motores, Basys2 y
dems est estimado en 350 Kg.
Alimentacin: La forma de alimentacin de los circuitos y
motores ser con cualquier tipo de Bateras de Corriente
Continua.
Alimentacin Usada: Una bateras de 9V conectadas a los
puertos Vcc y GND dentro de los pines de Alimentacin del
robot, tambin se alimenta a travs de una batera externa
recargable de 3.6V Compatible con la Entrada del FPGA.
V. PROCEDIMIENTO
CONTRUCCIN DEL ROBOT MINI SUMO
ESQUEMA:
�2
Teniendo IB = 3.404uA
IC = IB () = 3.4uA(200) = 0.68mA
VR8 = 3.2V
R8 = 4.7Kohm
Construccin del robot
Versin Inicial
(ANEXO 1)
Se recomienda disear la placa PCB, para el puente
H seleccionado, ya que si utiliza tarjetas por puede
que el tamao de estas no sean el acordado en las
reglas de diseo del robot.
(ANEXO2)
El robot de Mini Sumo en base al reglamento, debe
tener un pulsante o switch de activacin (llave), que
deber encender al robot, y a partir de esta activacin
contara 5 segundos para empezar a buscar a su
contrincante, una vez detectado el contrincante el
robot proceder a tratar de expulsar al mismo de la
pista de combate.
Para encender el robot se cuenta con un switch.
El conteo requerido se realiza mediante
programacin interna del FPGA (Basys 2).
Para detectar al contrincante utilizaremos sensores
de proximidad, sensores infrarrojos. Su
funcionamiento se basa en que si hay un obstculo
cercano el ngulo de rebote ser a ms grande que si el
obstculo est ms lejos.
Para la movilidad del robot contamos con dos 2
servomotores truncados por la fuerza que necesita el
robot y el torque de este.
El robot no traspasa el borde de la pista de combate
debido a que se utiliza Optoacopladores, los cuales
varan su resistencia al estar expuestos a luz o
colores, principalmente blanco y negro.
Optoacoplador:
El opto acoplador nos entrega 1.6V a la base del
transistor cuando se polariza y 0.46V cuando no se
polariza gracias a la relacin de ganancia de sus
resistencias.
Entonces acoplamos un transistor para garantizar un 1 y 0
lgico.
Versin Final
�3
rels, motores de paso bipolares, solenoides en general y
cualquier carga que requiera una alta corriente y tensin.
COMPONENTES Y FUNCIN:
Sensor Infrarrojo
BASYS2:
Es un sensor ptico infrarrojo, de un rango de corto alcance
(menos de 5 cm) que se utiliza para detectar colores de objetos
y superficies. Su uso ms comn es para construir pequeos
robots. Contiene un emisor de radiacin infrarroja -fotodiodoy un receptor -fototransistor-. El fotodiodo emite un haz de
radiacin infrarroja, el fototransistor recibe ese haz de luz
cuando se refleja sobre alguna superficie u objeto.
Dependiendo de la cantidad de luz recibida por el
fototransistor el dispositivo enva una seal de retorno al
Servomotor hs 311:
Motores de corriente continua, usados por su alto torque 10
Kgcm^2.
Driver L293D
FPGA.
Ruedas:
Acopladas a los motores producen el movimiento.
Sharp:
Se trata de un puente en H (o medios puentes).
Capaz de conducir corrientes bidireccionales de hasta 1
amperio en el modelo L293 y hasta 600 mA en el modelo
L293D y con tensiones que van desde los 4.5V hasta los 36V
en ambos modelos.
Por supuesto podemos utilizarlo en otras aplicaciones o para
controlar otros componentes: motores de corriente continua,
El Sharp es un sensor medidor de distancias por infrarrojos
que indica mediante una salida analgica la distancia medida.
La tensin de salida vara de forma no lineal cuando se detecta
un objeto en una distancia entre 10 y 80 cm. La salida est
disponible de forma continua y su valor es actualizado cada 32
ms. Normalmente se conecta esta salida a la entrada de un
convertidor analgico digital el cual convierte la distancia en
un nmero que puede ser usado por el microprocesador.
�4
LOGICA DE PROGRAMACION
1.
Entradas , salidas y libreras declaradas :
3.
2. Divisor de frecuencia para que partir de la activacin
contara 5 segundos para empezar a buscar a su
contrincante.
El divisor de frecuencia tiene el objetivo de reducir la
frecuencia de entrada. ste se realiza con el contador
mostrado en el cdigo.
Kay que realizar un clculo entre la frecuencia de
entrada y la frecuencia de salida deseada. Este
clculo se realiza dentro de la Architecture.
Al llegar mi pulso clock en 1, se procede a
cumplir las condiciones propuestas para el
funcionamiento de los motores, dependiendo
de los valores que le llegue a los sensores.
�5
VII. BIBLIOGRAFA
Manual de VHDL: sntesis lgica
para
PLDs
(2a.
ed.)
Autor: Garca
Zuba,
Javier
Editorial: Publicaciones de la Universidad de Deusto
Fecha
de
Publicacin:
01/2005
Temas: VHDL
(Computer
hardware
description
language) VHDL (Lenguaje de descripcin de
hardware) Lenguajes de programacin.
La primera condicin me dice que si a todos los
sensores les llega un 1, debido a que reconoci
el color negro, entonces se encender el Motor
A1 y B1, es decir se desplazara hacia adelante.
Caso contrario si no cumple esa condicin,
vuelve a preguntar de nuevo si cumple la
segunda condicin, que es que el infrarrojo no
detecta nada y el primer sensor BNW tampoco
le llega una seal, entonces se encender el
motor A1 y B1.
Caso contrario si no cumple esa condicin,
vuelve a preguntar de nuevo si cumple la
tercera
condicin, que es que al sensor
BNW1='0' no le llega una seal, entonces se
encender el motor A2 y B2. sea da retro.
Caso contrario el robot empezara a dar vueltas
girando los motores A1 y B2, buscando un
oponente.
Al salir de todo el If sin cumplir ninguna de las
condiciones anteriores, el programa manda a
apagar a todos los motores y a resetear el
programa.
VI. CONCLUSIONES
Se logr la construccin y programacin del
robot mini sumo.
Se aplic los conocimientos adquiridos durante
el curso de VHDL.
Se trabaj con datos obtenidos mediante los
sensores infrarrojos y el Sharp, y se realiz las
acciones necesarias para que el robot pelee
por s solo.
[Link]
VIII. ANEXOS:
(ANEXO1)
(ANEXO2)