También podría gustarte
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Enviar Watsap Masivo en Visual Basic 6Documento2 páginasEnviar Watsap Masivo en Visual Basic 6Juan Carlos Trejo OsorioAún no hay calificaciones
- Aprendizaje Automático La Guía Definitiva para Principiantes para Comprender El Aprendizaje Automático (Machine Learning Guide... (Sebastian Dark (Dark, Sebastian) )Documento56 páginasAprendizaje Automático La Guía Definitiva para Principiantes para Comprender El Aprendizaje Automático (Machine Learning Guide... (Sebastian Dark (Dark, Sebastian) )lucita44100% (1)
- Soportes en Impresión 3DDocumento14 páginasSoportes en Impresión 3DPierDonneeAún no hay calificaciones
- Elaboracion de Diagramas y Plantillas para Casosde Uso Del ProyectoDocumento10 páginasElaboracion de Diagramas y Plantillas para Casosde Uso Del ProyectoEsp Wistong De Jesús Sarmiento100% (1)
- Aprender Postproducción Avanzada con After Effects con 100 ejercicios prácticosDe EverandAprender Postproducción Avanzada con After Effects con 100 ejercicios prácticosAún no hay calificaciones
- Practicas PLCDocumento14 páginasPracticas PLCSalma G. Garcia la Sienra100% (1)
- Planeación Del MantenimientoDocumento27 páginasPlaneación Del MantenimientoJairoAún no hay calificaciones
- 100 Preguntas BaseDocumento7 páginas100 Preguntas BaseEldon Centella Ribera100% (2)
- Curso plc1Documento102 páginasCurso plc1isai365100% (2)
- Guía de PLC N1 - 2019Documento7 páginasGuía de PLC N1 - 2019Oscar SotoAún no hay calificaciones
- Examen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDocumento14 páginasExamen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDarwin Yonel Mamani SalcedoAún no hay calificaciones
- Programacion AWLDocumento45 páginasProgramacion AWLquiquemejiaAún no hay calificaciones
- Reporte Ascensor Con PLCDocumento21 páginasReporte Ascensor Con PLCOscar Lopez75% (4)
- Prácticas y Tareas CLA - 8Documento13 páginasPrácticas y Tareas CLA - 8Daniel Mejia AlvarezAún no hay calificaciones
- Pre-Maestria UNI 2012Documento7 páginasPre-Maestria UNI 2012cacr_72Aún no hay calificaciones
- GRAFCETDocumento38 páginasGRAFCETLuis Lema100% (1)
- Instructivo Arukay 2020Documento1 páginaInstructivo Arukay 2020Ricardo Augusto Salamanca RodriguezAún no hay calificaciones
- PRÁCTICAS TINKERCAD de Programación en ArduinoDocumento9 páginasPRÁCTICAS TINKERCAD de Programación en ArduinoLuky23ultraXDAún no hay calificaciones
- Tia PortalDocumento16 páginasTia Portalguido50% (2)
- Ejercicios Zelio Soft 2Documento8 páginasEjercicios Zelio Soft 2Juan Carlos Villagrán100% (2)
- Manual de Practicas PLC 2022Documento10 páginasManual de Practicas PLC 2022egregorio bretadoAún no hay calificaciones
- Ascensor Informe FinalDocumento7 páginasAscensor Informe FinalFacundo LopezAún no hay calificaciones
- Practica BalancinDocumento5 páginasPractica BalancinCdcc90Aún no hay calificaciones
- AutomatizacionDocumento24 páginasAutomatizacionGuardiaAún no hay calificaciones
- Informe Del AscensorDocumento14 páginasInforme Del AscensorHenrySolórzanoMartel100% (1)
- Reporte Termometro Lm35-1Documento9 páginasReporte Termometro Lm35-1Gabino CaciaAún no hay calificaciones
- Programación Básica PLC - Contadores y MemoriasDocumento3 páginasProgramación Básica PLC - Contadores y MemoriasSILVIA FERNANDA LOPEZ GOMEZAún no hay calificaciones
- Practica LavadoraDocumento6 páginasPractica LavadoraArturinMandujanoAún no hay calificaciones
- En Este Documento Se Presentará Unos Programas de PLC Que Estuvimos Haciendo A Lo Largo de La Unidad 2 Pero para EmpezarDocumento9 páginasEn Este Documento Se Presentará Unos Programas de PLC Que Estuvimos Haciendo A Lo Largo de La Unidad 2 Pero para EmpezarBadillo García Carlos EduardoAún no hay calificaciones
- Tarea1156858 16656807791Documento6 páginasTarea1156858 16656807791Maria VoelckerAún no hay calificaciones
- GUIAnLOGOnAI 54629de43916a76Documento6 páginasGUIAnLOGOnAI 54629de43916a76lagranpmAún no hay calificaciones
- Practica BalancinDocumento4 páginasPractica BalancinF Javier GarcíaAún no hay calificaciones
- Controlador Logico Programable Informe de Laboratorio Nro 2Documento13 páginasControlador Logico Programable Informe de Laboratorio Nro 2Jaime100% (1)
- Taller No. 2Documento9 páginasTaller No. 2Yessica Paola Gomez SernaAún no hay calificaciones
- Prácticas Presenciales de Autómatas ProgramablesDocumento12 páginasPrácticas Presenciales de Autómatas ProgramablesDragos IonescuAún no hay calificaciones
- Practica 7 Medicion e InstrumentacionDocumento5 páginasPractica 7 Medicion e InstrumentacionArcadio LópezAún no hay calificaciones
- Examen Parcial 2014-IDocumento3 páginasExamen Parcial 2014-IBrandon Rengifo ReynagaAún no hay calificaciones
- Trabajo Práctico Final Integrador 2021Documento10 páginasTrabajo Práctico Final Integrador 2021Gaston PiselliniAún no hay calificaciones
- Manual Practico PLC AvanzadoDocumento28 páginasManual Practico PLC Avanzadofenixanabantha100% (2)
- Manual de Pr-Cticas PLCDocumento13 páginasManual de Pr-Cticas PLCJOSE RAMON VAZQUEZ MARTINEZAún no hay calificaciones
- Lab 1 Introducción A La Programación y Funciones Lógicas SFDocumento13 páginasLab 1 Introducción A La Programación y Funciones Lógicas SFSantiago FuentesAún no hay calificaciones
- Practica - 7. - Lenguaje Grafcet-2Documento3 páginasPractica - 7. - Lenguaje Grafcet-2mauricio sosaAún no hay calificaciones
- Proyecto 2 AlumnosDocumento14 páginasProyecto 2 Alumnosalejandro.llorensAún no hay calificaciones
- Practica1 Chico LedesmaDocumento10 páginasPractica1 Chico LedesmaPatricia CandoAún no hay calificaciones
- 14 de Mayo 10° Clase Unidad Iii Sección X Grafcet (Parte I) Automat Viernes Ing Gilberto AparicioDocumento27 páginas14 de Mayo 10° Clase Unidad Iii Sección X Grafcet (Parte I) Automat Viernes Ing Gilberto AparicioJuan RodriguezAún no hay calificaciones
- Lenguajes de Programación (PLC) LD1Documento27 páginasLenguajes de Programación (PLC) LD1Anonymous 6ZVBcXy7nrAún no hay calificaciones
- Lab N°6 Programación AnalógicaDocumento22 páginasLab N°6 Programación AnalógicaRenzo GonzalesAún no hay calificaciones
- Hoja de Trabajo - Diseño CombinacionalDocumento3 páginasHoja de Trabajo - Diseño CombinacionalCarlos SuruyAún no hay calificaciones
- Aplicación Del Métodos Secuenciales en La Solución de Problemas de ElectroneumáticaDocumento7 páginasAplicación Del Métodos Secuenciales en La Solución de Problemas de ElectroneumáticaGustavoHDoussetAún no hay calificaciones
- Trabajo N°3 - TF - ICA - 2017Documento5 páginasTrabajo N°3 - TF - ICA - 2017Rodrigo RamiroAún no hay calificaciones
- Informe Clasificador Por PesoDocumento7 páginasInforme Clasificador Por PesoIvan RamosAún no hay calificaciones
- Practicas de LaboratorioDocumento10 páginasPracticas de LaboratorioHéctor VelásquezAún no hay calificaciones
- El Automata M340 - ProblemasDocumento261 páginasEl Automata M340 - ProblemasRonald Paucara CallasiAún no hay calificaciones
- Guia 6Documento4 páginasGuia 6AlexSoteloAún no hay calificaciones
- Reprote Lab 3 PLCDocumento7 páginasReprote Lab 3 PLCAlexander MendezAún no hay calificaciones
- Lab Medicion de Nivel Por Presion y Peso - VACDocumento6 páginasLab Medicion de Nivel Por Presion y Peso - VACG ParradoAún no hay calificaciones
- PLC Diapositivas y EjemplosDocumento102 páginasPLC Diapositivas y EjemplosZemog ZemogAún no hay calificaciones
- Practicas Logix ProDocumento9 páginasPracticas Logix ProAngel GonzalezAún no hay calificaciones
- Diseno AscensorDocumento23 páginasDiseno AscensorRosa AngelicaAún no hay calificaciones
- If Labo5 - 20202Documento25 páginasIf Labo5 - 20202O'BESSO DE LA SOTA GLEN RENATOAún no hay calificaciones
- Metodo de CascadaDocumento7 páginasMetodo de CascadaUriel Enrique Drift BoossAún no hay calificaciones
- Hernan Vasquez de La Torre Examen FinalDocumento14 páginasHernan Vasquez de La Torre Examen FinalDarwin Yonel Mamani SalcedoAún no hay calificaciones
- Retos MAQ IDocumento17 páginasRetos MAQ Icristopher oroscoAún no hay calificaciones
- Trabajo F3 - ICA - V3-2019 - ImparDocumento4 páginasTrabajo F3 - ICA - V3-2019 - ImparMauricio Apaza AguirreAún no hay calificaciones
- Sistemas Digitales - TIF3 Ascensor de 8 PisosDocumento22 páginasSistemas Digitales - TIF3 Ascensor de 8 PisosALEJANDRO FIGUEROA HUARACALLOAún no hay calificaciones
- EvaluacionDocumento11 páginasEvaluacionMaxi JerezzAún no hay calificaciones
- Ejemplos de LabViewDocumento14 páginasEjemplos de LabViewRene Alonso Jimenez RodriguezAún no hay calificaciones
- Enviar Imágenes Con Arduino y GSMDocumento4 páginasEnviar Imágenes Con Arduino y GSMPierDonneeAún no hay calificaciones
- Primeros Pasos Usando El Módulo GPRSDocumento9 páginasPrimeros Pasos Usando El Módulo GPRSPierDonneeAún no hay calificaciones
- Philips Ala20uDocumento8 páginasPhilips Ala20uPierDonneeAún no hay calificaciones
- Schematic Nrf24l01+pa+lnaDocumento2 páginasSchematic Nrf24l01+pa+lnaPierDonneeAún no hay calificaciones
- 4 Consejos para Programar Código Más Limpio en ArduinoDocumento10 páginas4 Consejos para Programar Código Más Limpio en ArduinoPierDonneeAún no hay calificaciones
- Cómo Vigilar Tu Casa Desde El CelularDocumento3 páginasCómo Vigilar Tu Casa Desde El CelularPierDonneeAún no hay calificaciones
- Arduino y Sim800lDocumento2 páginasArduino y Sim800lPierDonneeAún no hay calificaciones
- Un Generador de Funciones de Onda Cuadrada Simple Con Un ArduinoDocumento9 páginasUn Generador de Funciones de Onda Cuadrada Simple Con Un ArduinoPierDonneeAún no hay calificaciones
- Arduino y Sim800lDocumento2 páginasArduino y Sim800lPierDonneeAún no hay calificaciones
- Generador de Ondas Cuadradas para ArduinoDocumento2 páginasGenerador de Ondas Cuadradas para ArduinoPierDonneeAún no hay calificaciones
- BlueTooth Control de Atenuador TRIACDocumento7 páginasBlueTooth Control de Atenuador TRIACPierDonneeAún no hay calificaciones
- Puertos de E/S de AVRDocumento29 páginasPuertos de E/S de AVRPierDonneeAún no hay calificaciones
- Timers AvrDocumento70 páginasTimers AvrPierDonneeAún no hay calificaciones
- Biblioteca AC PWM para Microcontroladores Atmel Atmega8Documento5 páginasBiblioteca AC PWM para Microcontroladores Atmel Atmega8PierDonneeAún no hay calificaciones
- eJEMPLO iNTERRUPT ARDUINODocumento3 páginaseJEMPLO iNTERRUPT ARDUINOPierDonneeAún no hay calificaciones
- Reloj de Tiempo Real Con Arduino y DS3231Documento6 páginasReloj de Tiempo Real Con Arduino y DS3231PierDonneeAún no hay calificaciones
- Generar Un Pulso de Duración Concreta Con ArduinoDocumento4 páginasGenerar Un Pulso de Duración Concreta Con ArduinoPierDonneeAún no hay calificaciones
- Generar Señal PWM para Servo Con AVR ATmega328pDocumento9 páginasGenerar Señal PWM para Servo Con AVR ATmega328pPierDonneeAún no hay calificaciones
- Timer 2Documento5 páginasTimer 2PierDonneeAún no hay calificaciones
- FFT ArduinoDocumento3 páginasFFT ArduinoPierDonneeAún no hay calificaciones
- Profundizando en Cura 3D SlicerDocumento44 páginasProfundizando en Cura 3D SlicerPierDonneeAún no hay calificaciones
- Arduino Timer TutorialDocumento10 páginasArduino Timer TutorialPierDonneeAún no hay calificaciones
- Ajustes de RellenoDocumento6 páginasAjustes de RellenoPierDonneeAún no hay calificaciones
- Configurar Arduino Uno Como Generador de Ondas CuadradasDocumento2 páginasConfigurar Arduino Uno Como Generador de Ondas CuadradasPierDonneeAún no hay calificaciones
- Magnetoterapia ManualDocumento21 páginasMagnetoterapia ManualPierDonneeAún no hay calificaciones
- ConclusionesDocumento5 páginasConclusionesCheko CiagarAún no hay calificaciones
- Eiffel 2007Documento54 páginasEiffel 2007Daniel Angulo GrandaAún no hay calificaciones
- Usando Rabbitmq en ClusterDocumento11 páginasUsando Rabbitmq en ClusterWilmer Rondón BriceñoAún no hay calificaciones
- Capítulo 07 PDFDocumento105 páginasCapítulo 07 PDFJORDI PEÑARANDA MORENOAún no hay calificaciones
- Parcial 2 Revisión Del IntentoDocumento1 páginaParcial 2 Revisión Del IntentoShaquille Mercado AzconaAún no hay calificaciones
- Esp14 - Lenguaje de Programacion IV (Oracle Developer)Documento3 páginasEsp14 - Lenguaje de Programacion IV (Oracle Developer)Chelsey T. Hayvey StoneAún no hay calificaciones
- LPOO I-Modulo 3-Similitudes y Diferencias Entre C# y VisualDocumento44 páginasLPOO I-Modulo 3-Similitudes y Diferencias Entre C# y VisualBarbie KenAún no hay calificaciones
- EC0285 Maquinado de Piezas Por Control NuméricoDocumento10 páginasEC0285 Maquinado de Piezas Por Control Numéricoc.neveaAún no hay calificaciones
- Variables: Docente Ing. Mauricio Alejandro Ríos PalacioDocumento9 páginasVariables: Docente Ing. Mauricio Alejandro Ríos PalacioLevith CahuanaAún no hay calificaciones
- Monografia Linea de Balance APA Hola 3Documento48 páginasMonografia Linea de Balance APA Hola 3ALEJANDRO PARRA RIVEROSAún no hay calificaciones
- Programación de Microcontroladores 2Documento21 páginasProgramación de Microcontroladores 2Alvaro Vargas GonzalesAún no hay calificaciones
- 2326 Introduccion Algoritmia CP T1BT 202101Documento2 páginas2326 Introduccion Algoritmia CP T1BT 202101Mafe Moya CantoAún no hay calificaciones
- Introducción: 6.3 Operaciones Básicas y Tipos de AccesoDocumento7 páginasIntroducción: 6.3 Operaciones Básicas y Tipos de AccesoGuillermo SanchezAún no hay calificaciones
- Expresiones ComplejasDocumento1 páginaExpresiones ComplejasferfperaltaAún no hay calificaciones
- Imprimir Sin Vista Previa en C#, ReportViewerDocumento7 páginasImprimir Sin Vista Previa en C#, ReportViewerAnselmo Francisco Gudiño GuzmanAún no hay calificaciones
- Examen Java ScriptDocumento5 páginasExamen Java ScriptMiguelon CespedesAún no hay calificaciones
- Programacion Semana 3Documento3 páginasProgramacion Semana 3Juan Carlos ZuñigaAún no hay calificaciones
- PythonDocumento2 páginasPythonandresAún no hay calificaciones
- Almacenamiento de Datos Gestión de FicherosDocumento12 páginasAlmacenamiento de Datos Gestión de FicherosAngela PardoAún no hay calificaciones
- 4 - 1 LCD T6963cDocumento3 páginas4 - 1 LCD T6963cMiguel Angel TholaAún no hay calificaciones
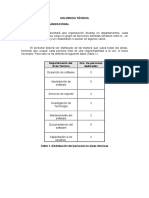
- Solvencia TécnicaDocumento7 páginasSolvencia TécnicaTito Flores VicenteAún no hay calificaciones