También podría gustarte
- Diseño Conceptual de Un Robot para Diagnóstico de Líneas de Alta TensiónDocumento7 páginasDiseño Conceptual de Un Robot para Diagnóstico de Líneas de Alta TensiónFISRAELGRAún no hay calificaciones
- Robot Seguidor PDFDocumento15 páginasRobot Seguidor PDFM1lw4rAún no hay calificaciones
- Informa Final RoboticaDocumento10 páginasInforma Final RoboticaSILVANA MARISOL ESPINOZA ZAMORAAún no hay calificaciones
- Informe de La Araña RobóticaDocumento25 páginasInforme de La Araña Robóticasebastian100% (1)
- Morfología Del Robot - 2019Documento41 páginasMorfología Del Robot - 2019Slayther Ortiz MalcaAún no hay calificaciones
- Diseño y Construccion de Un Puente GruaDocumento15 páginasDiseño y Construccion de Un Puente GruamvladimirAún no hay calificaciones
- CFE Demandas 2006-05Documento98 páginasCFE Demandas 2006-05César ChagollánAún no hay calificaciones
- Proyecto Motor GeneradorDocumento26 páginasProyecto Motor Generadorjulian sanchezAún no hay calificaciones
- Seguidor de Linea Dispo555Documento6 páginasSeguidor de Linea Dispo555Joseph Moreno GutierrezAún no hay calificaciones
- Examen Tecnología Industrial de La Comunidad Valenciana (Extraordinaria de 2016) (WWW - Examenesdepau.com)Documento4 páginasExamen Tecnología Industrial de La Comunidad Valenciana (Extraordinaria de 2016) (WWW - Examenesdepau.com)MaiLuisAún no hay calificaciones
- Proyecto Motor Generador 2Documento28 páginasProyecto Motor Generador 2julian sanchezAún no hay calificaciones
- Robotica IndustrialDocumento138 páginasRobotica IndustrialJeans Marco Nassi CernaAún no hay calificaciones
- Contadores de EjesDocumento5 páginasContadores de EjesBrian DomecqAún no hay calificaciones
- Proyecto Puente GruaDocumento34 páginasProyecto Puente GruaJeison Tena SuarezAún no hay calificaciones
- Avance Punto 2 - Miguel YelaDocumento17 páginasAvance Punto 2 - Miguel YelaKevin Stiven Ceballos TorresAún no hay calificaciones
- Informe Final DinamicosDocumento12 páginasInforme Final Dinamicosmorenomagda028Aún no hay calificaciones
- Informe Robot SumoDocumento10 páginasInforme Robot SumoGustavo Adolfo50% (2)
- Diseño y Montaje de Un Sistema Eléctrico de Banda Transportadora Automática de Envasado de Un ProductoDocumento11 páginasDiseño y Montaje de Un Sistema Eléctrico de Banda Transportadora Automática de Envasado de Un ProductoJhon fredis Sanchez alberniaAún no hay calificaciones
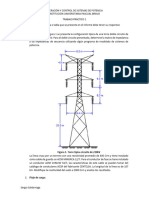
- Trabajo Práctico 1Documento3 páginasTrabajo Práctico 1andresAún no hay calificaciones
- Metodo Recierre Interruptor y Medio PDFDocumento15 páginasMetodo Recierre Interruptor y Medio PDFAlberto DelgadoAún no hay calificaciones
- Informe Práctica 3Documento13 páginasInforme Práctica 3Fabricio Veintimilla BautistaAún no hay calificaciones
- Universidad Técnica Estatal de Quevedo Facultad Ciencias de La Ingeniería Ingeniería Telemática Proyecto Final IntegrantesDocumento11 páginasUniversidad Técnica Estatal de Quevedo Facultad Ciencias de La Ingeniería Ingeniería Telemática Proyecto Final IntegrantesSILVANA MARISOL ESPINOZA ZAMORAAún no hay calificaciones
- Diseño y Construcción de Un Sistema de Control de Cantones Ferroviarios PDFDocumento2 páginasDiseño y Construcción de Un Sistema de Control de Cantones Ferroviarios PDFpoketupiAún no hay calificaciones
- Caso Prácticod PDFDocumento11 páginasCaso Prácticod PDFGerardo JuarezAún no hay calificaciones
- Lab 7 Maq III PDFDocumento6 páginasLab 7 Maq III PDFJairo B. Fernandez BaezAún no hay calificaciones
- Control de VelocidadDocumento2 páginasControl de VelocidadEDWIN ORLANDO QUISPE TOAQUIZAAún no hay calificaciones
- Proyecto Puente GruaDocumento39 páginasProyecto Puente GruaJesus Ticona Arteaga50% (2)
- Practica 16ucbDocumento13 páginasPractica 16ucbMOROKO ONLINEAún no hay calificaciones
- Robots Actuados Por CablesDocumento4 páginasRobots Actuados Por CablesAlejandro TapiaAún no hay calificaciones
- Practica 4 Ondas GuiadasDocumento8 páginasPractica 4 Ondas GuiadasLuis BufoteninaAún no hay calificaciones
- Proyecto Propagacion Electromagnetica 1Documento24 páginasProyecto Propagacion Electromagnetica 1Wilber Pari ReyesAún no hay calificaciones
- Informe Robot SumoDocumento10 páginasInforme Robot SumoFrancisco Romeo GalindoAún no hay calificaciones
- Sistemas de Distribución.Documento14 páginasSistemas de Distribución.Obeth BañuelosAún no hay calificaciones
- Rúbrica Del 10% - ELCTRONICA - III - 2021 - 2Documento7 páginasRúbrica Del 10% - ELCTRONICA - III - 2021 - 2leninAún no hay calificaciones
- Artículo Científico Tesis Estación Robótica CartesianaDocumento6 páginasArtículo Científico Tesis Estación Robótica CartesianaChristian SalgadoAún no hay calificaciones
- Trabajo ParcialDocumento14 páginasTrabajo ParcialGabrielRodrigoF.AcebeyAún no hay calificaciones
- 2002 PR, Diseño Modelado y Construccion de Un Robot MovilDocumento5 páginas2002 PR, Diseño Modelado y Construccion de Un Robot MovilDelgaduAún no hay calificaciones
- Morfologia de Los Robots Manipuladores CAD/CAMDocumento15 páginasMorfologia de Los Robots Manipuladores CAD/CAMCM35Aún no hay calificaciones
- Robot Seguidor de LineaDocumento2 páginasRobot Seguidor de LineaLiseth Paola TorresAún no hay calificaciones
- CP ST Práctica-2Documento5 páginasCP ST Práctica-2Steven PeñaAún no hay calificaciones
- Practica de Motor A PasosDocumento15 páginasPractica de Motor A PasosOscar Pedro NavazAún no hay calificaciones
- Robot Seguidor de Lineas: "Robolin"Documento3 páginasRobot Seguidor de Lineas: "Robolin"javierAún no hay calificaciones
- Practica de Motor A PasosDocumento15 páginasPractica de Motor A Pasosmartin50Aún no hay calificaciones
- Maquinas 8Documento5 páginasMaquinas 8Jhonathan Ever Meneses LopezAún no hay calificaciones
- Arranque Directo Motor 3lDocumento6 páginasArranque Directo Motor 3lFrancisco ZuñigaAún no hay calificaciones
- Operacion Puente GruaDocumento109 páginasOperacion Puente GruaSimón Pedro Araya Tapia100% (2)
- Luis A. Aranda Cañete - Operaciones - LíneasDocumento14 páginasLuis A. Aranda Cañete - Operaciones - LíneasRichard100% (1)
- Primera SustentacionDocumento26 páginasPrimera SustentacionLuis Angel Bonza PeñaAún no hay calificaciones
- Actividad #1 RobóticaDocumento5 páginasActividad #1 RobóticaBryan TGAún no hay calificaciones
- Informe FajaDocumento17 páginasInforme FajaFrank VargasAún no hay calificaciones
- CE Informe8EnriquezDocumento3 páginasCE Informe8Enriquezalexander enriquezAún no hay calificaciones
- Operaciones LineasDocumento14 páginasOperaciones LineasJulian TabaresAún no hay calificaciones
- Estructura Mecanica de Un RobotDocumento21 páginasEstructura Mecanica de Un RobotPalmeras01Aún no hay calificaciones
- PRESENTACION CochabambaDocumento14 páginasPRESENTACION CochabambalorenaAún no hay calificaciones
- Proyecto de EelctrotecniaDocumento20 páginasProyecto de EelctrotecniaESTHER GONZALES MOLINAAún no hay calificaciones
- Proyecto Robot Seguidor de Linea PDFDocumento11 páginasProyecto Robot Seguidor de Linea PDFrapzosAún no hay calificaciones
- Proyecto Final de Cafi 2Documento7 páginasProyecto Final de Cafi 2Anghelo David Palomino ArevaloAún no hay calificaciones
- Diseño y Construcción de Un Robot Seguidor de LineaDocumento3 páginasDiseño y Construcción de Un Robot Seguidor de LineaMilton SierraAún no hay calificaciones
- Montaje de redes eléctricas aéreas de alta tensión. ELEE0209De EverandMontaje de redes eléctricas aéreas de alta tensión. ELEE0209Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Fracturas Causales y La ConcausaDocumento2 páginasFracturas Causales y La ConcausaAlipio Chanca Coquil100% (1)
- TALLER de Analisis de Procesos MMMDocumento4 páginasTALLER de Analisis de Procesos MMMMichael StikAún no hay calificaciones
- 05 Pets Tarrajeo de MurosDocumento4 páginas05 Pets Tarrajeo de MurosJesus PradaAún no hay calificaciones
- Evaluacion de La Inteligencia Tarea VDocumento8 páginasEvaluacion de La Inteligencia Tarea Vnenyr_2Aún no hay calificaciones
- Trabajo en EquipoDocumento12 páginasTrabajo en EquipoFelipe Trujillo GomezAún no hay calificaciones
- Boletin Oficial - Oxígeno - Precio MáximoDocumento6 páginasBoletin Oficial - Oxígeno - Precio MáximoTodo NoticiasAún no hay calificaciones
- Cuatro Operaciones para Quinto de Primaria PDFDocumento2 páginasCuatro Operaciones para Quinto de Primaria PDFErika Armas Aguilar100% (4)
- Información Preinscripción: Fecha Versión: 5/06/2014 Versión: 0.1 Página: 1 de 2 Código: 01Documento2 páginasInformación Preinscripción: Fecha Versión: 5/06/2014 Versión: 0.1 Página: 1 de 2 Código: 01Eliecer Manuel Noble GuerraAún no hay calificaciones
- 8 Acta General AcordsDocumento4 páginas8 Acta General AcordsAdriAún no hay calificaciones
- Percepcion Visual PorterosDocumento17 páginasPercepcion Visual Porterosjuanjoromi100% (1)
- Diques Transversales Metodo de Explotacixn Minero X AmbientalDocumento4 páginasDiques Transversales Metodo de Explotacixn Minero X AmbientalLeonardo Octavio Olarte SánchezAún no hay calificaciones
- ABD - Practica 13-3Documento6 páginasABD - Practica 13-3ANIBAL GONZALEZ TOVARAún no hay calificaciones
- Actividades Sobre La Casa de Bernarda AlbaDocumento2 páginasActividades Sobre La Casa de Bernarda AlbaRene MurguiaAún no hay calificaciones
- Sesión de Aprendizaje 2do Grado Exp 3Documento5 páginasSesión de Aprendizaje 2do Grado Exp 3Soledad Peralta TapiaAún no hay calificaciones
- Consentimiento InformadoDocumento1 páginaConsentimiento InformadoKarina Chavez VargasAún no hay calificaciones
- CHEC-LIST Bateria Hidrociclones 3120-Cy-001Documento4 páginasCHEC-LIST Bateria Hidrociclones 3120-Cy-001Carlos ArancibiaAún no hay calificaciones
- Preguntas Cap 11Documento5 páginasPreguntas Cap 11Claudia CastilloAún no hay calificaciones
- Cuadro Concentrador - Crecimiento y Desarrollo EconómicoDocumento6 páginasCuadro Concentrador - Crecimiento y Desarrollo EconómicoDañe CabreraAún no hay calificaciones
- Prevencion y Control de Incendios Extintores 2Documento47 páginasPrevencion y Control de Incendios Extintores 2joselynortizleyvaAún no hay calificaciones
- Sistemas de Potencia Apuntes IngeneiraDocumento28 páginasSistemas de Potencia Apuntes IngeneiraFabian MartinezAún no hay calificaciones
- 91Documento16 páginas91alanAún no hay calificaciones
- Uso de EppsDocumento37 páginasUso de EppsPedro MiguelAún no hay calificaciones
- Ejercicios Semana 1 - Temas 03 y 04Documento2 páginasEjercicios Semana 1 - Temas 03 y 04Raulssj23Aún no hay calificaciones
- Module 1, Lesson ADocumento3 páginasModule 1, Lesson Abullasat1Aún no hay calificaciones
- Deserción Escolar Marco TeroricoDocumento6 páginasDeserción Escolar Marco TeroricoNoel TubínAún no hay calificaciones
- Apu Partidas NuevasDocumento51 páginasApu Partidas NuevasMaguiber ChvAún no hay calificaciones
- Resumen de Pagos de PlanillaDocumento1 páginaResumen de Pagos de PlanillaHenry Baldomero Acero TelleriaAún no hay calificaciones
- Informe 1Documento11 páginasInforme 1Emerson Chavez HuanshaAún no hay calificaciones
- FAVN Submission SpanishDocumento2 páginasFAVN Submission SpanishLu Salinas VignesAún no hay calificaciones
- Programa Satelital Worldview 1 David Felipe Diaz BuitragoDocumento49 páginasPrograma Satelital Worldview 1 David Felipe Diaz BuitragoDAVID FELIPE DIAZ BUITRAGOAún no hay calificaciones