25% encontró este documento útil (4 votos)
14K vistas13 páginasDiagrama y Programación PLC Ascensor
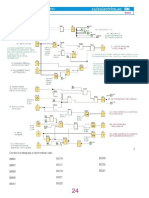
Este documento presenta los equipos y pasos necesarios para programar un autómata S7-200 de Siemens usando el software STEP 7. Los equipos incluyen el autómata S7-200, un entrenador y el software STEP 7 en un PC. Los pasos son: 1) conectar el autómata al PC, 2) crear un programa de ejemplo usando contactos, bobinas y cuadros en KOP, 3) cargar el programa en el autómata, 4) poner el autómata en modo RUN, y 5) probar el programa usando el
Cargado por
Jordi MañeDerechos de autor
© Attribution Non-Commercial (BY-NC)
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
25% encontró este documento útil (4 votos)
14K vistas13 páginasDiagrama y Programación PLC Ascensor
Este documento presenta los equipos y pasos necesarios para programar un autómata S7-200 de Siemens usando el software STEP 7. Los equipos incluyen el autómata S7-200, un entrenador y el software STEP 7 en un PC. Los pasos son: 1) conectar el autómata al PC, 2) crear un programa de ejemplo usando contactos, bobinas y cuadros en KOP, 3) cargar el programa en el autómata, 4) poner el autómata en modo RUN, y 5) probar el programa usando el
Cargado por
Jordi MañeDerechos de autor
© Attribution Non-Commercial (BY-NC)
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd