También podría gustarte
- Ejercicios PID diseño controladoresDocumento4 páginasEjercicios PID diseño controladoresSergio RefolioAún no hay calificaciones
- Funciones Transfer en CIA de PulsosDocumento7 páginasFunciones Transfer en CIA de PulsosFabian Gerardo Vallejo JimenezAún no hay calificaciones
- Apuntes de La Materia de Microcontroladores 1Documento10 páginasApuntes de La Materia de Microcontroladores 1Damian RocoAún no hay calificaciones
- Hoja Datos Termo Duo RTD 1035449Documento4 páginasHoja Datos Termo Duo RTD 1035449Alvaro Aniceto RomeroAún no hay calificaciones
- Lab. Lugar Geométrico de La RaícesDocumento13 páginasLab. Lugar Geométrico de La RaícesJessica FernandezAún no hay calificaciones
- Lab - 2 Sistemas de Control DigitalDocumento25 páginasLab - 2 Sistemas de Control DigitalNiltonRamírezAún no hay calificaciones
- Transformada Z (Informe Ieee) .1Documento6 páginasTransformada Z (Informe Ieee) .1misusibuAún no hay calificaciones
- Controladores PID y Controladores PID ModificadosDocumento29 páginasControladores PID y Controladores PID Modificadossandro95Aún no hay calificaciones
- Modelos Matematicos y Funciones de TransferenciaDocumento12 páginasModelos Matematicos y Funciones de TransferenciaFHERFFFAún no hay calificaciones
- Labview EjerciciosDocumento19 páginasLabview EjerciciosjulpaiAún no hay calificaciones
- Compensadores en MathlabDocumento11 páginasCompensadores en MathlabOmar Trejo PortugalAún no hay calificaciones
- CANopen-Protocolo capa aplicación CANDocumento4 páginasCANopen-Protocolo capa aplicación CANLydan Robles CañónAún no hay calificaciones
- Control PID Discreto y ConexionXBeeDocumento29 páginasControl PID Discreto y ConexionXBeeAlexander ValenciaAún no hay calificaciones
- Guía de Ejercicios Prueba N°2Documento1 páginaGuía de Ejercicios Prueba N°2Esbany Lanchipa SanchezAún no hay calificaciones
- Controlador Pid de Un Motor DCDocumento31 páginasControlador Pid de Un Motor DCNoe Daniel Figueroa SerranoAún no hay calificaciones
- Apuntes de Control PidDocumento134 páginasApuntes de Control PidcualquieraqueseaAún no hay calificaciones
- 1 Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko OgataDocumento757 páginas1 Sistemas de Control en Tiempo Discreto 2a Ed - Katsuhiko OgataAlexandra RomeroAún no hay calificaciones
- Control Digital: Función de Transferencia y SimulinkDocumento23 páginasControl Digital: Función de Transferencia y SimulinkCsar PariapazaAún no hay calificaciones
- Robotica e inteligencia artificial - Cinematica de robots industrialesDocumento5 páginasRobotica e inteligencia artificial - Cinematica de robots industrialesCristian UrrestaAún no hay calificaciones
- PROYECTO Ball Beam Control 2012Documento15 páginasPROYECTO Ball Beam Control 2012CM35100% (3)
- Controldigital-Libro de TextoDocumento21 páginasControldigital-Libro de TextoNate River0% (1)
- Implementacion de Control PI para Un Motor de CD y Demostracion Del Uso Del Observador Lungerber Usando Matlab 2222Documento18 páginasImplementacion de Control PI para Un Motor de CD y Demostracion Del Uso Del Observador Lungerber Usando Matlab 2222Alan GutierrezAún no hay calificaciones
- Control Discretizacion de Controladores y PlantasDocumento30 páginasControl Discretizacion de Controladores y PlantasCharles Rhodes RhodesAún no hay calificaciones
- Manual Ejercicios Core 2 Parte 1-3Documento46 páginasManual Ejercicios Core 2 Parte 1-3SoulMex0% (1)
- SINTONIZAcion Ziegler NicholsDocumento13 páginasSINTONIZAcion Ziegler NicholsAnonymous YDxuBwAún no hay calificaciones
- Simulacion Rectificador Media Onda LTSpiceDocumento9 páginasSimulacion Rectificador Media Onda LTSpiceJuanchi100% (1)
- Informe Control Digital Control de VelocidadDocumento14 páginasInforme Control Digital Control de VelocidadMarcelo Alejandro Alvarez LunaAún no hay calificaciones
- Señales y SistemasDocumento37 páginasSeñales y SistemasWilliamChaconSanchez50% (2)
- Examen Sistemas de Control Digital 2014Documento18 páginasExamen Sistemas de Control Digital 2014Ruben ToledoAún no hay calificaciones
- Control DiscretoDocumento47 páginasControl DiscretoCristobal Orlando Valenzuela RiosAún no hay calificaciones
- ControladoresDocumento15 páginasControladoresAntony TorrezAún no hay calificaciones
- Ensayo de Control 1 (Control Digital)Documento5 páginasEnsayo de Control 1 (Control Digital)Paul GuillenAún no hay calificaciones
- Control AutomaticoDocumento4 páginasControl AutomaticoFreddy Muñoz RiffoAún no hay calificaciones
- Ejemplos de BondGraphDocumento69 páginasEjemplos de BondGraphDavid BandaAún no hay calificaciones
- UPIITA Mecatrónica 9 Control Par Calculado para Robot "RR" y "RRR"Documento21 páginasUPIITA Mecatrónica 9 Control Par Calculado para Robot "RR" y "RRR"Juan De Dios Rodriguez100% (4)
- S7200 Ejemplo10Documento6 páginasS7200 Ejemplo10Max Javier Abad SanturAún no hay calificaciones
- Solucion Fase 1 Parte Teórica CONTROL DIGITALDocumento13 páginasSolucion Fase 1 Parte Teórica CONTROL DIGITALM cardona100% (4)
- Circuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sDocumento4 páginasCircuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sJ.A. Calvillo100% (1)
- ASSEMBLER Contador PulsosDocumento2 páginasASSEMBLER Contador Pulsosenrique100% (1)
- Diseño de Lazoz Pid Por Polos y CerosDocumento19 páginasDiseño de Lazoz Pid Por Polos y Cerosavengers vengadorAún no hay calificaciones
- Analisis de Respuesta Transitoria 2Documento44 páginasAnalisis de Respuesta Transitoria 2Yohn MartAún no hay calificaciones
- Modelado Matemático de Sistemas DinámicosDocumento19 páginasModelado Matemático de Sistemas Dinámicospiwy017Aún no hay calificaciones
- Diseño Buck PDFDocumento7 páginasDiseño Buck PDFSamuelMuñozAún no hay calificaciones
- 3.4 Introduccion A Control Digital PDFDocumento80 páginas3.4 Introduccion A Control Digital PDFJohann Smith Aranda RamosAún no hay calificaciones
- Teoria de Control Electronico 3Documento35 páginasTeoria de Control Electronico 3Juan Pablo García Flores100% (5)
- Informe Compensador Adelanto-AtrasoDocumento8 páginasInforme Compensador Adelanto-AtrasoEliana PilcoAún no hay calificaciones
- Sistema de Automatizacion S7 200Documento478 páginasSistema de Automatizacion S7 200Jhonny Zambrano SaavedraAún no hay calificaciones
- Efectos de Adición de Polos y CerosDocumento20 páginasEfectos de Adición de Polos y CerosDiego XavierAún no hay calificaciones
- Presentación 1.1 - Introduccion Sistemas de Control DigitalDocumento26 páginasPresentación 1.1 - Introduccion Sistemas de Control DigitalKady Gisselle GomézAún no hay calificaciones
- Diseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.Documento12 páginasDiseño de Convertidores DC-DC Tipo Buck Típicos y Controlado para Un Mejor Entendimiento en Cuanto A Su Funcionamiento.hhryc7100% (3)
- Lab4 - Compensadores en Adelanto LGR 2020aDocumento19 páginasLab4 - Compensadores en Adelanto LGR 2020afernandoAún no hay calificaciones
- Implementación de Un Clúster de Cálculo DistribuidoDocumento71 páginasImplementación de Un Clúster de Cálculo DistribuidoFrancisco Jimeno Yucuma MoralesAún no hay calificaciones
- Informe Final PID LuminosidadDocumento19 páginasInforme Final PID LuminosidadKatty PintoAún no hay calificaciones
- 2-R-EDU-68 Plan de Practica - 4 Control AutomaticoDocumento13 páginas2-R-EDU-68 Plan de Practica - 4 Control AutomaticoSergio M de JAún no hay calificaciones
- Controlador DC motorDocumento23 páginasControlador DC motorOscar Laica100% (1)
- AutoDocumento12 páginasAutoBill WenAún no hay calificaciones
- Rediseño - de Una Planta Procesadora de QuinuaDocumento93 páginasRediseño - de Una Planta Procesadora de QuinuaDaniel Barrenechea ChirinosAún no hay calificaciones
- Controlador PID Twin Rotor MIMODocumento4 páginasControlador PID Twin Rotor MIMOFercho QrAún no hay calificaciones
- Lab4 - Compensadores en Adelanto LGR 2020aDocumento20 páginasLab4 - Compensadores en Adelanto LGR 2020agonzaloAún no hay calificaciones
- Automatizacion Manual de PLCDocumento132 páginasAutomatizacion Manual de PLCDavid Javier100% (1)
- Ecuaciones Lineales en ExcelDocumento23 páginasEcuaciones Lineales en ExcelGABRIEL CORREAAún no hay calificaciones
- Centro de Servicio en NeuropsicopedagogíaDocumento7 páginasCentro de Servicio en NeuropsicopedagogíaGABRIEL CORREAAún no hay calificaciones
- Sistema Básico Fibra ÓpticaDocumento283 páginasSistema Básico Fibra ÓpticaGABRIEL CORREAAún no hay calificaciones
- Metodologías para La Toma de Decisiones, Apoyadas en Lógica DifusaDocumento83 páginasMetodologías para La Toma de Decisiones, Apoyadas en Lógica DifusaGABRIEL CORREAAún no hay calificaciones
- Toma de Decisiones Con MATLAB, Usando Lógica DifusaDocumento19 páginasToma de Decisiones Con MATLAB, Usando Lógica DifusaGABRIEL CORREAAún no hay calificaciones
- Manual Resumido Instalación de Telecomunicaciones en Edificios - GUÍA TÉCNICA CON NORMAS DE LA EIA/TIA PARA EL MEDIO DE TRANSMISIÓN DE LAS COMUNICACIONES EN EDIFICIOS - Fibra Óptica y Cableado EstructuradoDocumento43 páginasManual Resumido Instalación de Telecomunicaciones en Edificios - GUÍA TÉCNICA CON NORMAS DE LA EIA/TIA PARA EL MEDIO DE TRANSMISIÓN DE LAS COMUNICACIONES EN EDIFICIOS - Fibra Óptica y Cableado EstructuradoGABRIEL CORREA100% (1)
- Tipos de escalas de calificaciónDocumento41 páginasTipos de escalas de calificaciónJainerSiadoAún no hay calificaciones
- A4. Realizar Mediciones Con Diferentes Instrumentos PDFDocumento21 páginasA4. Realizar Mediciones Con Diferentes Instrumentos PDFLeoAún no hay calificaciones
- Proceso SMAWDocumento11 páginasProceso SMAWMayrita M RojasAún no hay calificaciones
- Cómo Conectar Diodos en ParaleloDocumento5 páginasCómo Conectar Diodos en Paralelozerquera3000Aún no hay calificaciones
- InvestigaciónDocumento7 páginasInvestigaciónMayte ZavalaAún no hay calificaciones
- Fisica 2Documento18 páginasFisica 2elianaAún no hay calificaciones
- APLICACIONES Sistemas de Ecuaciones LinealesDocumento7 páginasAPLICACIONES Sistemas de Ecuaciones LinealesNormaPonceAún no hay calificaciones
- Resistencia variable en función de la longitudDocumento7 páginasResistencia variable en función de la longitudRamiro GenecisAún no hay calificaciones
- Norma instalaciones eléctricasDocumento12 páginasNorma instalaciones eléctricasMa GuangchengAún no hay calificaciones
- Guía Practica para Pruebas de Resistencia A TierraDocumento84 páginasGuía Practica para Pruebas de Resistencia A TierraRonald Arnoldo Buechsel VaidesAún no hay calificaciones
- Manual Instalacion Electrica Domiciliaria Bvci0005043Documento100 páginasManual Instalacion Electrica Domiciliaria Bvci0005043Carlos E. Alave Ugarte100% (5)
- CIDEAD. 2º BACHILLERATO. ELECTROTECNIA. Tema 11. - La Potencia en Los Circuitos de Corriente AlternaDocumento18 páginasCIDEAD. 2º BACHILLERATO. ELECTROTECNIA. Tema 11. - La Potencia en Los Circuitos de Corriente AlternaGregorio Caballero RosalesAún no hay calificaciones
- RP-21FB20 Chassis SC-023ADocumento22 páginasRP-21FB20 Chassis SC-023Agasparv7Aún no hay calificaciones
- Condensador cuestionario capacidad reactiva fórmulaDocumento1 páginaCondensador cuestionario capacidad reactiva fórmulaJosue Yosua Mamani SanabriaAún no hay calificaciones
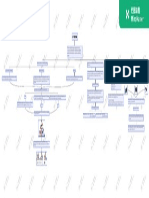
- Mapa ConceptualDocumento1 páginaMapa ConceptualBoolena GarciaAún no hay calificaciones
- Cajahuishca Bryan Masabanda Stalin 3a RDT Actividad 09Documento4 páginasCajahuishca Bryan Masabanda Stalin 3a RDT Actividad 09Bryan CajahuishcaAún no hay calificaciones
- Arranque Directo (Wegtron S.R.L.)Documento19 páginasArranque Directo (Wegtron S.R.L.)Yuri OrellanoAún no hay calificaciones
- Arranque Directo de Un Motor TrifasicoDocumento11 páginasArranque Directo de Un Motor TrifasicodavidyoveraAún no hay calificaciones
- Sistema de Transmisión Eléctrica PDFDocumento90 páginasSistema de Transmisión Eléctrica PDFGabo GaboAún no hay calificaciones
- Presentacion Electricidad AutomotrizDocumento24 páginasPresentacion Electricidad AutomotrizLuis Alberto Yucra Cofré100% (1)
- Circuito LRCDocumento21 páginasCircuito LRCAlejandro RGAún no hay calificaciones
- Capitulo 7Documento13 páginasCapitulo 7juanito1984560% (1)
- Proyecto Generador Hidroelectrico Hidraulica CanalesDocumento10 páginasProyecto Generador Hidroelectrico Hidraulica CanalesAndrés TarazonaAún no hay calificaciones
- Manual - de Instalacion de MedidoresDocumento27 páginasManual - de Instalacion de MedidoresVladimir Coello Tapia83% (6)
- Informe de divisores de voltaje y corrienteDocumento3 páginasInforme de divisores de voltaje y corrienteCAMILO RAMIREZAún no hay calificaciones
- Tiros QuedadosDocumento39 páginasTiros Quedadossoydiosfgp100% (2)
- Instrumentación y Ley de OhmDocumento13 páginasInstrumentación y Ley de OhmMauro Jesús Zambrana CastroAún no hay calificaciones
- ProblemasUT2 2010Documento16 páginasProblemasUT2 2010Edgar BarreraAún no hay calificaciones
- Fuente DualDocumento7 páginasFuente DualBryan GarcíaAún no hay calificaciones
- Cuaderno de InformeDocumento17 páginasCuaderno de InformeLuis Angel RojasAún no hay calificaciones