También podría gustarte
- Funcion de TransferenciaDocumento7 páginasFuncion de Transferenciaedrilp21Aún no hay calificaciones
- Portafolio Oscar MedinaDocumento24 páginasPortafolio Oscar MedinaPablo RamirezAún no hay calificaciones
- Unidad 2 - Modelado MatemáticoDocumento30 páginasUnidad 2 - Modelado Matemáticoangel9021Aún no hay calificaciones
- Modelo MatematicosDocumento10 páginasModelo MatematicosJairo Alonso Ojeda AriasAún no hay calificaciones
- Clase 3 Dinamica de SisDocumento11 páginasClase 3 Dinamica de SisFrancisco Plascencia SuarezAún no hay calificaciones
- Función de TransferenciaDocumento5 páginasFunción de TransferenciaJose EkAún no hay calificaciones
- Sistemas DinámicosDocumento15 páginasSistemas DinámicosDiego Guadalupe Diaz SantiagoAún no hay calificaciones
- Modelos MatemáticosDocumento26 páginasModelos MatemáticosEmmanuel BarcalaAún no hay calificaciones
- Modelos Matematicos y Funciones de TransferenciaDocumento12 páginasModelos Matematicos y Funciones de TransferenciaFHERFFFAún no hay calificaciones
- Función de TransferenciaDocumento17 páginasFunción de Transferenciamelany haro100% (1)
- Apuntes InstrumentacionDocumento68 páginasApuntes InstrumentacionDylan RyuseAún no hay calificaciones
- Guia N 2 Funcion de Transferencia y Diagramas de BloquesDocumento10 páginasGuia N 2 Funcion de Transferencia y Diagramas de Bloquesicepolo100% (1)
- Cortes Villalvazo Gloria INSB Sistemas de Control Tarea2.2 2unidadDocumento9 páginasCortes Villalvazo Gloria INSB Sistemas de Control Tarea2.2 2unidadFATIMA MARGARITA LOPEZ MAGANAAún no hay calificaciones
- 1 Unidad Conceptos Básicos de ControlDocumento9 páginas1 Unidad Conceptos Básicos de ControlluizAún no hay calificaciones
- Sistemas de ControlDocumento14 páginasSistemas de ControlAlexander PaucarAún no hay calificaciones
- Modelos Matemáticos de Sistemas de ControlDocumento119 páginasModelos Matemáticos de Sistemas de ControlJuan Vásquez Rengifo100% (1)
- Modelado Matemático de Sistemas DinámicosDocumento19 páginasModelado Matemático de Sistemas Dinámicospiwy017Aún no hay calificaciones
- 01-Modelado Matematico de Sistemas de ControlDocumento52 páginas01-Modelado Matematico de Sistemas de ControlLuis Eduardo Martinez RuizAún no hay calificaciones
- Unidad 2 PresaDocumento18 páginasUnidad 2 PresaGamaliel CruzAún no hay calificaciones
- Practica 1 ControlDocumento5 páginasPractica 1 ControlÄlëJä GiirälDoAún no hay calificaciones
- Proyecto de ControlDocumento3 páginasProyecto de Controlbyron alaAún no hay calificaciones
- Sistemas de Control Pare 1Documento29 páginasSistemas de Control Pare 1Jimmy De Ramirez ChavezAún no hay calificaciones
- Documento Sistemas DinámicosDocumento6 páginasDocumento Sistemas DinámicosSammy BarrenitoAún no hay calificaciones
- Controles Motores DC y Ac PDFDocumento367 páginasControles Motores DC y Ac PDFSergio Andres MoralesAún no hay calificaciones
- Modelación Matemática - Sistemas DinámicosDocumento23 páginasModelación Matemática - Sistemas DinámicosLuis VillegasAún no hay calificaciones
- Introducción A Los Sistemas de Control: Definición de Función de Transferencia y Diagrama de BloqueDocumento17 páginasIntroducción A Los Sistemas de Control: Definición de Función de Transferencia y Diagrama de BloqueCARLOS ALBERTO PINEDA PRADOAún no hay calificaciones
- Modelo Matematico en Control de ProcesosDocumento8 páginasModelo Matematico en Control de ProcesosSebas SebasAún no hay calificaciones
- Regulación Preguntas ResueltasDocumento17 páginasRegulación Preguntas ResueltasAntonio MolaAún no hay calificaciones
- Modelos MatematicosDocumento10 páginasModelos MatematicosStephania LuciaAún no hay calificaciones
- Actividad 2.2Documento5 páginasActividad 2.2Simp PalaciosAún no hay calificaciones
- Sistemas y Transformada ZDocumento14 páginasSistemas y Transformada ZJose CabusAún no hay calificaciones
- Act 01 GTRDocumento4 páginasAct 01 GTRTu abuelita feaAún no hay calificaciones
- Sistemas DinamicosDocumento39 páginasSistemas DinamicosAnonymous byBKseNN100% (1)
- Examen ControlDocumento4 páginasExamen ControlDavidGonzálezAún no hay calificaciones
- Respuestas de Sistemas de Primer y Segundo OrdenDocumento11 páginasRespuestas de Sistemas de Primer y Segundo Ordennoobmaster69Aún no hay calificaciones
- Preguntas RepasoDocumento19 páginasPreguntas RepasoDiego MarchiAún no hay calificaciones
- UNIDAD II Funcion de TransferenciaDocumento54 páginasUNIDAD II Funcion de TransferenciaDavid Jose GodoyAún no hay calificaciones
- Modelacion Dinamica de Sistemas de ControlDocumento15 páginasModelacion Dinamica de Sistemas de ControlCarlozs Luizs'100% (2)
- PreguntasDocumento12 páginasPreguntasJose M CaballeroAún no hay calificaciones
- Variables de EstadoDocumento21 páginasVariables de Estadoolac17Aún no hay calificaciones
- Introduccion A La Modelación MatematicaDocumento20 páginasIntroduccion A La Modelación MatematicaEduardo PintoAún no hay calificaciones
- UNGS Control Automático 2020 - 02 Modelos Matemáticos Rev0Documento26 páginasUNGS Control Automático 2020 - 02 Modelos Matemáticos Rev0Elián OviedoAún no hay calificaciones
- Práctica Nro. 02Documento9 páginasPráctica Nro. 02Angel TarazonaAún no hay calificaciones
- Fase 3 StevensonDocumento11 páginasFase 3 StevensonStevenson Valencia S100% (1)
- Analisis de Sistemas DinamicosDocumento19 páginasAnalisis de Sistemas DinamicosOvando100% (1)
- Preguntas y Problemas Modelado 1er ExamenDocumento11 páginasPreguntas y Problemas Modelado 1er ExamenAlan GutierrezAún no hay calificaciones
- Unidad I Control de ProcesosDocumento23 páginasUnidad I Control de ProcesosFrancisco GalleguillosAún no hay calificaciones
- Unidad01 ModDocumento44 páginasUnidad01 ModMichael A.CAún no hay calificaciones
- Unidad 2 - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaDocumento10 páginasUnidad 2 - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaPablo ForeroAún no hay calificaciones
- P2 CP-CautomaticoDocumento9 páginasP2 CP-CautomaticoSebastian CachiguangoAún no hay calificaciones
- Análisis de La Respuesta Transitoria de Sistemas ContinuosDocumento6 páginasAnálisis de La Respuesta Transitoria de Sistemas ContinuosCesar MalagaAún no hay calificaciones
- Act 1 - Unidad 3Documento24 páginasAct 1 - Unidad 3Jeoniimo Saanchezz100% (1)
- Las Variables de EstadoDocumento13 páginasLas Variables de EstadoORLANDO RODRIGUEZAún no hay calificaciones
- Unidad 2 Control DIgitalDocumento18 páginasUnidad 2 Control DIgitalOpherothAún no hay calificaciones
- INFORMEDocumento17 páginasINFORMEGerardo BoniAún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Violencia TesisDocumento32 páginasViolencia TesisJosé Luis Castillo PeñafielAún no hay calificaciones
- 1 - 2 - Números Reales - Propiedades y OperacionesDocumento74 páginas1 - 2 - Números Reales - Propiedades y OperacionesBerna PaGuzAún no hay calificaciones
- AA2nGuianaprendizaje 9860dc8df53747eDocumento5 páginasAA2nGuianaprendizaje 9860dc8df53747eYonys BeltranAún no hay calificaciones
- Trabajo Metodo de Trabajo SeguroDocumento47 páginasTrabajo Metodo de Trabajo SeguroMARIA MERCEDESAún no hay calificaciones
- Pecado AngelicoDocumento8 páginasPecado Angelicolys rodriguezAún no hay calificaciones
- Dientes de TurnerDocumento9 páginasDientes de TurnerJaime A. FG33% (3)
- El Confort en La ArquitecturaDocumento8 páginasEl Confort en La ArquitecturaJuan Alberto Aguayo HernandezAún no hay calificaciones
- Diferencias IndividualesDocumento4 páginasDiferencias IndividualesXiomara ArenasAún no hay calificaciones
- Cognición Social en La Epilepsia Infantil Con Picos CentrotemporalesDocumento21 páginasCognición Social en La Epilepsia Infantil Con Picos CentrotemporalesCarina CamponeroAún no hay calificaciones
- Sentencia C 822 05Documento126 páginasSentencia C 822 05Estiven CardonaAún no hay calificaciones
- IEEEDocumento2 páginasIEEEErwin BlancoAún no hay calificaciones
- 14 15 La Muerte de Las Palabras - Alumno - SolucionesDocumento4 páginas14 15 La Muerte de Las Palabras - Alumno - SolucionesaromeoAún no hay calificaciones
- Seder ShabatDocumento4 páginasSeder Shabatlucho0314Aún no hay calificaciones
- Ensayo Neurociencias en EducaciónDocumento6 páginasEnsayo Neurociencias en EducaciónGiarelli Barriga100% (8)
- Manual VaR Simulacion Monte CarloDocumento8 páginasManual VaR Simulacion Monte CarloYneleAún no hay calificaciones
- Universidad Privada Domingo Savio: Sentencia 1671/2003Documento4 páginasUniversidad Privada Domingo Savio: Sentencia 1671/2003Cristian CalizayaAún no hay calificaciones
- Caratula para TrabajosDocumento8 páginasCaratula para TrabajosJonathan Bajaña DiazAún no hay calificaciones
- Sesion 1 Guias AlimentariasDocumento39 páginasSesion 1 Guias AlimentariasmiriamAún no hay calificaciones
- Trabajo Final Corte Internacional de Justicia 1Documento34 páginasTrabajo Final Corte Internacional de Justicia 1Julia Gomez GalindoAún no hay calificaciones
- Tarea Presupuesto de EfectivoDocumento9 páginasTarea Presupuesto de EfectivoWalter GarciaAún no hay calificaciones
- Protocolo Hiperglucemia Abril2023Documento12 páginasProtocolo Hiperglucemia Abril2023ElberAún no hay calificaciones
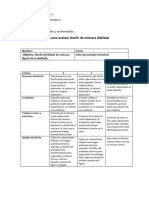
- Rubrica para Evaluar Diseño de MascaraDocumento1 páginaRubrica para Evaluar Diseño de MascaraLizbeth Alva GamarraAún no hay calificaciones
- Apuntes Bio Bloque V Inmu IDocumento10 páginasApuntes Bio Bloque V Inmu IElena_77Aún no hay calificaciones
- Cemex PDFDocumento276 páginasCemex PDFDiego GarzónAún no hay calificaciones
- PLANIFICACIÓN DE TRABAJO SIMULTÁNEO UltimasDocumento140 páginasPLANIFICACIÓN DE TRABAJO SIMULTÁNEO UltimasGabriel Gomez89% (9)
- Poesia Argued AsDocumento18 páginasPoesia Argued Asnewton696100% (1)
- Trayectoria Perfiles Modernismo PosmodernidadDocumento12 páginasTrayectoria Perfiles Modernismo PosmodernidadRey Tlahtoani0% (1)
- Vicios de DiccionDocumento13 páginasVicios de DiccionAlfredo Arango EscobarAún no hay calificaciones
- Escuela Profesional de Ingeniería Civil: Universidad Privada Antenor OrregoDocumento282 páginasEscuela Profesional de Ingeniería Civil: Universidad Privada Antenor OrregoJenny Valeria Ullon CarranzaAún no hay calificaciones
- CA936313AD3016D7B06F6B3A385C40C7Documento8 páginasCA936313AD3016D7B06F6B3A385C40C7estebanN89Aún no hay calificaciones