También podría gustarte
- Control PID de Velocidad de Un Motor DCDocumento7 páginasControl PID de Velocidad de Un Motor DCCristian TarazonaAún no hay calificaciones
- MODELOS DE CONSTRUCCIÓN DE PROTOTIPOS - Estiveenson PDFDocumento22 páginasMODELOS DE CONSTRUCCIÓN DE PROTOTIPOS - Estiveenson PDFJimmy Antonio Herrera NeiraAún no hay calificaciones
- Control Por Modos Deslizantes Del Motor de C.D. Sin Escobillas Usando El Algoritmo TwistingDocumento7 páginasControl Por Modos Deslizantes Del Motor de C.D. Sin Escobillas Usando El Algoritmo TwistingFernando Holguín SánchezAún no hay calificaciones
- Amca2009 96Documento6 páginasAmca2009 96Charly MercadoAún no hay calificaciones
- Grupo Polo Sanchez Toledo UlloaDocumento3 páginasGrupo Polo Sanchez Toledo Ulloaseebass srosrAún no hay calificaciones
- Análisis de Un Sistema LinealDocumento19 páginasAnálisis de Un Sistema LinealAdrián Núñez ReinaAún no hay calificaciones
- Paper Fina 3Documento6 páginasPaper Fina 3Ricardo ZapataAún no hay calificaciones
- Taller Modelamiento de Un Sistema ElectromecánicoDocumento5 páginasTaller Modelamiento de Un Sistema ElectromecánicoJose Angelo Moncaleano VaronAún no hay calificaciones
- Informe Fase 2 Equipo1Documento5 páginasInforme Fase 2 Equipo1Sebastian YelaAún no hay calificaciones
- Control de Un Robot Tipo RRDocumento10 páginasControl de Un Robot Tipo RRzeuszetaAún no hay calificaciones
- Cinemática de Brazo Manipulador de 2 GDL SalomonDocumento8 páginasCinemática de Brazo Manipulador de 2 GDL Salomonjuanillofc100% (5)
- Plantilla Reporte Electricidad y Magnetismo Ind 2022Documento5 páginasPlantilla Reporte Electricidad y Magnetismo Ind 2022Acosta Castillo Ximena AraceliAún no hay calificaciones
- Hugo RamirezDocumento10 páginasHugo RamirezJuan Camilo Alarcon JaramilloAún no hay calificaciones
- Informe 1 ControlDocumento9 páginasInforme 1 ControlAlejandro Osorio GallgoAún no hay calificaciones
- Sistema de Nivelación AutomáticoDocumento8 páginasSistema de Nivelación AutomáticoHenry AjquejayAún no hay calificaciones
- Control DC MotorDocumento12 páginasControl DC MotorCAMILO ANDRÉS HERNÁNDEZ STERLINGAún no hay calificaciones
- Documents - MX - Simulacion de Un Robot de 2gdl en Matlab PDFDocumento3 páginasDocuments - MX - Simulacion de Un Robot de 2gdl en Matlab PDFheromx2Aún no hay calificaciones
- Funcion de Transferencia Motor DCDocumento3 páginasFuncion de Transferencia Motor DCAugusto Rodas VelezAún no hay calificaciones
- Modelado de Sistemas Mecanicos Con MatlabDocumento9 páginasModelado de Sistemas Mecanicos Con MatlabRicardo Alfonso Martínez AzaAún no hay calificaciones
- Cap002 Modelos Matematicos de Sistemas DinámicosDocumento46 páginasCap002 Modelos Matematicos de Sistemas Dinámicosivanaru404Aún no hay calificaciones
- Control de posición de antena mediante Simulink y MATLABDocumento2 páginasControl de posición de antena mediante Simulink y MATLABMr LopezAún no hay calificaciones
- Diseño de Un Servomotor en Base de Un Motor DC Usando Matlab/simulinkDocumento3 páginasDiseño de Un Servomotor en Base de Un Motor DC Usando Matlab/simulinkFranzum MamaniAún no hay calificaciones
- 1 PDFDocumento8 páginas1 PDFMario CasasAún no hay calificaciones
- Dinamica de Brazo de RobotDocumento11 páginasDinamica de Brazo de RobotJulio Cesar Gonzalez GarciaAún no hay calificaciones
- Proyecto Motor DCDocumento5 páginasProyecto Motor DCMarlon BoknegraAún no hay calificaciones
- Desarrollo de Sistemas Dinámicos Animados en MatlabDocumento8 páginasDesarrollo de Sistemas Dinámicos Animados en MatlabDanielOlmedoNavarreteAún no hay calificaciones
- Taller 3 ControlDocumento15 páginasTaller 3 ControlJuan R. BautistaAún no hay calificaciones
- Pendulo InvertidoDocumento12 páginasPendulo InvertidoJazahel EspinosaAún no hay calificaciones
- Diseño y Simulación Del Comportamiento de Un Robot Scara de 2 Grados de LibertadDocumento3 páginasDiseño y Simulación Del Comportamiento de Un Robot Scara de 2 Grados de LibertadDaniel_19938Aún no hay calificaciones
- PrimerDocumento5 páginasPrimerOctavio Quispe Yucra100% (1)
- Ua4 G4 Imar01Documento5 páginasUa4 G4 Imar01Jorge Andrés Pérez MillarAún no hay calificaciones
- 5 Dinámica Del RobotDocumento11 páginas5 Dinámica Del RobotJairo Aguilar RomeroAún no hay calificaciones
- Sistema de Control de Posicion Motor C.D.Documento8 páginasSistema de Control de Posicion Motor C.D.Yoleiba Nava100% (1)
- Proyecto Pendulo InvertidoDocumento13 páginasProyecto Pendulo InvertidoJohn WinchesterAún no hay calificaciones
- Modelos Matematicos de Los SistemasDocumento70 páginasModelos Matematicos de Los SistemasYANQUI VELASQUEZ JUAN MILLERAún no hay calificaciones
- LabControl 3Documento3 páginasLabControl 3Juan S ParraAún no hay calificaciones
- Funciones Comandos en MatlabDocumento11 páginasFunciones Comandos en Matlabjohnelectronica50% (2)
- Practica ° 2 ControlDocumento7 páginasPractica ° 2 ControlDiego LopezAún no hay calificaciones
- UNIDAD 1 y 2.1Documento24 páginasUNIDAD 1 y 2.1Ale ZarateAún no hay calificaciones
- Funcion de Tranferencia Carrito SeguidorDocumento13 páginasFuncion de Tranferencia Carrito SeguidorVíctor MachucaAún no hay calificaciones
- Mod Din RobotDocumento9 páginasMod Din RobotAlejandra Bejarano RinconAún no hay calificaciones
- Dinamica de Un Motor DC en Tiempo DiscretoDocumento3 páginasDinamica de Un Motor DC en Tiempo DiscretoIsaias FloCaAún no hay calificaciones
- Nicolás Morgan, Informe Control PDFDocumento5 páginasNicolás Morgan, Informe Control PDFNico MorganAún no hay calificaciones
- Control de robot mediante visiónDocumento20 páginasControl de robot mediante visiónPaul CevallosAún no hay calificaciones
- Grua de Pendulo Doble - Ing Victor Julian Fernandez CarrazanaDocumento22 páginasGrua de Pendulo Doble - Ing Victor Julian Fernandez CarrazanaVictor Julián Fernández CarrazanaAún no hay calificaciones
- Clase 3 Modelado de Sistemas Dinámicos PDFDocumento36 páginasClase 3 Modelado de Sistemas Dinámicos PDFFidel Andía GuzmánAún no hay calificaciones
- Lab 2Documento4 páginasLab 2Daniel Quesada BejaranoAún no hay calificaciones
- Perez Arellano AlanDocumento15 páginasPerez Arellano AlanFernando ReyesAún no hay calificaciones
- Modelado de Un PénduloDocumento5 páginasModelado de Un PénduloReNé ShunAún no hay calificaciones
- Control de Posicion Angular de Un Helicoptero de 1 GDLDocumento15 páginasControl de Posicion Angular de Un Helicoptero de 1 GDLeduardoguidoAún no hay calificaciones
- Practica 3. Espacio de EstadoDocumento21 páginasPractica 3. Espacio de EstadoLUISAún no hay calificaciones
- Criterio de Areas Iguales PDFDocumento0 páginasCriterio de Areas Iguales PDFArturo MartinezAún no hay calificaciones
- Dinamica de SistemasDocumento7 páginasDinamica de SistemasSebastian GarciaAún no hay calificaciones
- Penduloinvertido1 PDFDocumento6 páginasPenduloinvertido1 PDFJulio BarreraAún no hay calificaciones
- Estabilidad de Sistemas ElectricosDocumento15 páginasEstabilidad de Sistemas ElectricosJohn RangelAún no hay calificaciones
- Sistema mecánico rotacional análisisDocumento30 páginasSistema mecánico rotacional análisisMaldito SudacaAún no hay calificaciones
- 347 1119 1 PBDocumento9 páginas347 1119 1 PBRasta Live Jash /B.D.C.G/Aún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Curso Control Digital Con DAQ USB 6009Documento17 páginasCurso Control Digital Con DAQ USB 6009Ricardo Rodriguez Bustinza100% (1)
- Curso Control Motores DCDocumento13 páginasCurso Control Motores DCRicardo Rodriguez BustinzaAún no hay calificaciones
- Determinación Experimental de La Función de TransferenciaDocumento10 páginasDeterminación Experimental de La Función de TransferenciaRicardo Rodriguez BustinzaAún no hay calificaciones
- Toolbox de Matemática SimbólicaDocumento21 páginasToolbox de Matemática SimbólicaRicardo Rodriguez BustinzaAún no hay calificaciones
- Aplica Toolkit de Identificación y Control Con LabVIEWDocumento32 páginasAplica Toolkit de Identificación y Control Con LabVIEWRicardo Rodriguez Bustinza100% (1)
- Aplica Toolbox de Identificación Con MatlabDocumento30 páginasAplica Toolbox de Identificación Con MatlabRicardo Rodriguez Bustinza100% (1)
- Control Digital FSTDocumento7 páginasControl Digital FSTRicardo Rodriguez BustinzaAún no hay calificaciones
- Modelo de Transporte y AsignacionDocumento48 páginasModelo de Transporte y AsignacionhernandeznolascoAún no hay calificaciones
- Estimación de tiempos y probabilidad de finalización de proyectoDocumento5 páginasEstimación de tiempos y probabilidad de finalización de proyectojulianenriquecalixtoAún no hay calificaciones
- El fracaso asegurado de un jefe de mantenimientoDocumento6 páginasEl fracaso asegurado de un jefe de mantenimientoJesus Humberto Tejero ArceoAún no hay calificaciones
- Pedro Frez Control Semana 2Documento8 páginasPedro Frez Control Semana 2Pedro Frez TorresAún no hay calificaciones
- Sistemas de inventario: controlar existenciasDocumento4 páginasSistemas de inventario: controlar existenciasMarvin Martinǝz'Aún no hay calificaciones
- Guía Rápida T-FlashDocumento22 páginasGuía Rápida T-FlashGlenys MuñozAún no hay calificaciones
- Lab04 - Jahuira TaparaDocumento5 páginasLab04 - Jahuira TaparaJoseph Jahuira TaparaAún no hay calificaciones
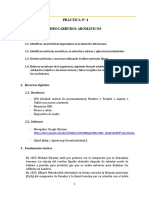
- Práctica #4 - Hidrocarburos AromáticosDocumento13 páginasPráctica #4 - Hidrocarburos AromáticossoledadAún no hay calificaciones
- M-Ac-uev-002 - Manual de Usuario Plataforma de Apoyo A La Presencialidad-Módulo Estudiante - Rev CDocumento31 páginasM-Ac-uev-002 - Manual de Usuario Plataforma de Apoyo A La Presencialidad-Módulo Estudiante - Rev CSharon yivana Remolina becerraAún no hay calificaciones
- Gestión Del Conocimiento, Ciencia, Tecnología, Sociedad e InnovaciónDocumento4 páginasGestión Del Conocimiento, Ciencia, Tecnología, Sociedad e InnovaciónmarcelaAún no hay calificaciones
- MovimientosDocumento6 páginasMovimientosDavid ParedesAún no hay calificaciones
- Hoja de Vida Javier BeltranDocumento2 páginasHoja de Vida Javier BeltranAndrea JimenezAún no hay calificaciones
- OTOcam Guía Del UsuarioDocumento20 páginasOTOcam Guía Del UsuarioJuanito Zúñiga GarcíaAún no hay calificaciones
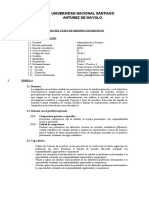
- SILABO DE METODOS ESTADISTICOS - AdministracionDocumento9 páginasSILABO DE METODOS ESTADISTICOS - AdministracionEdwin Johny Asnate SalazarAún no hay calificaciones
- Codigo RN PHPDocumento15 páginasCodigo RN PHPCarlos Orlando Claros VásquezAún no hay calificaciones
- sms13 447 MaximoTorrezDocumento3 páginassms13 447 MaximoTorrezMaximo Torrez HuanacuAún no hay calificaciones
- Actividad 3Documento4 páginasActividad 3Monica CastroAún no hay calificaciones
- Distancia y HoraDocumento3 páginasDistancia y HoraMundoIdeas VaithiareAún no hay calificaciones
- Guía rápida ZapiWinConsoleDocumento17 páginasGuía rápida ZapiWinConsoleLada LabusAún no hay calificaciones
- Juegos Gratis de PCDocumento3 páginasJuegos Gratis de PCAlejandra GuerraAún no hay calificaciones
- Manual PowerPointDocumento28 páginasManual PowerPointLaura Belen Mendoza HuancaAún no hay calificaciones
- Facturacion Electronica SiigoDocumento21 páginasFacturacion Electronica SiigoAlirio ArizaAún no hay calificaciones
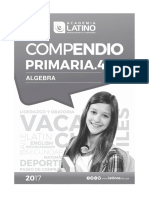
- 02 Algebra 4ºDocumento22 páginas02 Algebra 4ºRaul Alcantara SanchezAún no hay calificaciones
- 4to Informe de GeodesiaDocumento20 páginas4to Informe de GeodesiaEdwin Quintana RojasAún no hay calificaciones
- Configuración Electrohidraulic Controls Cat 972 GDocumento40 páginasConfiguración Electrohidraulic Controls Cat 972 GAngel Alberto Franco KukAún no hay calificaciones
- Modulo 23.planos para Dibujo en 3dDocumento12 páginasModulo 23.planos para Dibujo en 3dAntonio Favio OspinoAún no hay calificaciones
- Lecciones Algebra LinealDocumento138 páginasLecciones Algebra Linealedward034Aún no hay calificaciones
- Aplicación Móvil de CalculadoraDocumento5 páginasAplicación Móvil de Calculadoramartin ramosAún no hay calificaciones