También podría gustarte
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Clase Sistemas de EDO, 2da ParteDocumento8 páginasClase Sistemas de EDO, 2da Partelautaro acostaAún no hay calificaciones
- MODELIZACIÓN DE UN SIS - ECU. (Red ElectricaDocumento8 páginasMODELIZACIÓN DE UN SIS - ECU. (Red ElectricaJaneth AndradeAún no hay calificaciones
- Sistemas No Lineales Ecuaciones DiferencialesDocumento28 páginasSistemas No Lineales Ecuaciones DiferencialesjuztliAún no hay calificaciones
- Introduccion A Los Sistemas No Lineales de Ecuaciones DiferencialesDocumento24 páginasIntroduccion A Los Sistemas No Lineales de Ecuaciones DiferencialesJavier MorganAún no hay calificaciones
- Tipos de Puntos de EquilibrioDocumento73 páginasTipos de Puntos de EquilibrioAnaGarciaTovarAún no hay calificaciones
- Guia2 2019 ControlDocumento4 páginasGuia2 2019 ControlJorSepulvedaAún no hay calificaciones
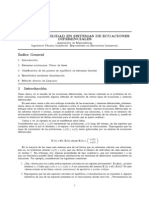
- Estabilidad en Sistemas de Ecuaciones DiferencialesDocumento18 páginasEstabilidad en Sistemas de Ecuaciones DiferencialesEduGrecoAún no hay calificaciones
- Control Por Estimadores Ejercicio7Documento6 páginasControl Por Estimadores Ejercicio7PerlaSantillanAún no hay calificaciones
- Tema 3Documento30 páginasTema 3Destruction SwordmasterAún no hay calificaciones
- Tensores FormularioDocumento6 páginasTensores FormulariocristianAún no hay calificaciones
- Ejercicios Control No LinealDocumento4 páginasEjercicios Control No LinealpepealfioAún no hay calificaciones
- Analisis Numerico Final Sistemas DinamicosDocumento17 páginasAnalisis Numerico Final Sistemas DinamicosAlexis TibanAún no hay calificaciones
- LyapunovDocumento8 páginasLyapunovlu casAún no hay calificaciones
- Sistemas Autonomos 2Documento141 páginasSistemas Autonomos 2Susej MI RotnederAún no hay calificaciones
- Unidad 4 - Método de Los DesplazamientosDocumento155 páginasUnidad 4 - Método de Los DesplazamientosCecy Breski100% (1)
- Monografia de ANÁLISISDocumento8 páginasMonografia de ANÁLISISSergioAugustoBaldeonAún no hay calificaciones
- BLOQUE1V2018V10Documento17 páginasBLOQUE1V2018V10Javier Solís FernándezAún no hay calificaciones
- Espacios de Estados LinealesDocumento15 páginasEspacios de Estados LinealesFreddy GarciaAún no hay calificaciones
- Oscilaciones y OndasDocumento31 páginasOscilaciones y OndasJamis HonorioAún no hay calificaciones
- Taller Estabilidad Sistemas Lineales y Sistemas CuasilinealesDocumento2 páginasTaller Estabilidad Sistemas Lineales y Sistemas CuasilinealesCristian David RendonAún no hay calificaciones
- ED-Sistemas No Lineales ClaseDocumento41 páginasED-Sistemas No Lineales Clasealfred2569Aún no hay calificaciones
- Tarea. Sistemas Discretos. Liapunov.Documento10 páginasTarea. Sistemas Discretos. Liapunov.Victor JuárezAún no hay calificaciones
- 07 Programacion Lineal 0Documento11 páginas07 Programacion Lineal 0Avelino SantiagoAún no hay calificaciones
- Variables de EstadoDocumento59 páginasVariables de EstadoJuan Carlos ElectroTecAún no hay calificaciones
- Resumen Edo Mat-023Documento7 páginasResumen Edo Mat-023sebastianparkerAún no hay calificaciones
- Lec10 PDFDocumento20 páginasLec10 PDFalicardozoAún no hay calificaciones
- Diag Fase EDO 2x2Documento6 páginasDiag Fase EDO 2x2mardel11Aún no hay calificaciones
- Actividad 2 - Foro de Discusión Métodos de Solución y Sistemas de Ecuaciones LinealesDocumento7 páginasActividad 2 - Foro de Discusión Métodos de Solución y Sistemas de Ecuaciones LinealesEdwin AlvarezAún no hay calificaciones
- SD Pract3 (2018)Documento4 páginasSD Pract3 (2018)MARCOAún no hay calificaciones
- EXAMEN EDO 2022 CoordinadoDocumento2 páginasEXAMEN EDO 2022 CoordinadobenjaminAún no hay calificaciones
- Analisis Del Plano de FaseDocumento19 páginasAnalisis Del Plano de FasephredlovAún no hay calificaciones
- Sistemas Definidos Por Ecuaciones en DiferenciaDocumento12 páginasSistemas Definidos Por Ecuaciones en DiferenciaJuan Carlos PintoAún no hay calificaciones
- Linealizacion PDFDocumento6 páginasLinealizacion PDFFernando CastroAún no hay calificaciones
- Ecuaciones Diferenciales OrdinariasDocumento7 páginasEcuaciones Diferenciales OrdinariasDaniel PazAún no hay calificaciones
- Modelado en Espacios de Estado Michelle JacomeDocumento8 páginasModelado en Espacios de Estado Michelle JacomeMichelle Jácome FonsecaAún no hay calificaciones
- Formulario Resumen de Modelos LinealesDocumento6 páginasFormulario Resumen de Modelos LinealesVictor StronskyAún no hay calificaciones
- Guia de Ecuaciones Parametricas PDFDocumento12 páginasGuia de Ecuaciones Parametricas PDFAxelhans MartinezAún no hay calificaciones
- Ajuste de Redes Gps - ActualizadoDocumento130 páginasAjuste de Redes Gps - ActualizadoJulian David Henao EscobarAún no hay calificaciones
- Laboratorio Solucionario3Documento4 páginasLaboratorio Solucionario3alex1208100% (1)
- 1 Apuntes de Regresion Lineal MultipleDocumento13 páginas1 Apuntes de Regresion Lineal MultipleyuyonachoAún no hay calificaciones
- Indices de Obs y ConDocumento22 páginasIndices de Obs y ConMauricioGDAún no hay calificaciones
- Sistemas Lineales Autonomos en El Plano Estudio CualitativoDocumento18 páginasSistemas Lineales Autonomos en El Plano Estudio CualitativoAle MoreiraAún no hay calificaciones
- Oviedo Sistemas de Ecuaciones - DesbloqueadoDocumento50 páginasOviedo Sistemas de Ecuaciones - DesbloqueadodanielaAún no hay calificaciones
- Teoria SistemasDocumento11 páginasTeoria SistemasGorky Limachi CcapaAún no hay calificaciones
- Problemas de Metodos NumericosDocumento13 páginasProblemas de Metodos Numericosve_asAún no hay calificaciones
- Ecuaciones Diferenciales ParcialesDocumento8 páginasEcuaciones Diferenciales ParcialesNico OrdenesAún no hay calificaciones
- CAP 6 372 DDocumento34 páginasCAP 6 372 DMauricio TarquinoAún no hay calificaciones
- Practica Uno Lab de ControlesDocumento16 páginasPractica Uno Lab de ControlesJhoan BarbozaAún no hay calificaciones
- Guión 2Documento27 páginasGuión 2LuisRcAún no hay calificaciones
- Capítulo 2Documento53 páginasCapítulo 2jesusAún no hay calificaciones
- Compensación de Redes Planas Por El Método ParamétricoDocumento26 páginasCompensación de Redes Planas Por El Método ParamétricoEncuestas LuzAún no hay calificaciones
- Guia de Sistemas de Ecuacines LinealesDocumento5 páginasGuia de Sistemas de Ecuacines LinealesFabio Andrés Obando RenteríaAún no hay calificaciones
- Sistemas de Ecuaciones Lineales Iem 2013Documento12 páginasSistemas de Ecuaciones Lineales Iem 2013diegoAún no hay calificaciones
- Lab 02 Sistemas LTI PDFDocumento4 páginasLab 02 Sistemas LTI PDF'Jph Flores BmxAún no hay calificaciones
- Texto - Cap 2 (Libro Prof. Maulio Rodríguez) PDFDocumento62 páginasTexto - Cap 2 (Libro Prof. Maulio Rodríguez) PDFMoises David CAún no hay calificaciones
- Ejercicios de Ecuaciones Diferenciales OrdinariasDe EverandEjercicios de Ecuaciones Diferenciales OrdinariasCalificación: 4 de 5 estrellas4/5 (1)
- Análisis de Trabajo Seguro (Ats) : Control de Sistema Piloto André Oviedo Contreras M-2 01-12-2018Documento1 páginaAnálisis de Trabajo Seguro (Ats) : Control de Sistema Piloto André Oviedo Contreras M-2 01-12-2018Quispe IvanAún no hay calificaciones
- Seguridad de Datos - Tarea 9Documento7 páginasSeguridad de Datos - Tarea 9Karla OlivaAún no hay calificaciones
- FactorizacionDocumento7 páginasFactorizacionjoan0% (2)
- Robótica IndustrialDocumento38 páginasRobótica IndustrialIsaiGuzmanHerreraAún no hay calificaciones
- FORO Ventajas y Desventajas de Las Tecnologias (NO TERMINADO)Documento1 páginaFORO Ventajas y Desventajas de Las Tecnologias (NO TERMINADO)Jorge RodriguezAún no hay calificaciones
- Formato de Solicitud de Actualizaciones y Novedades - para V3Documento1 páginaFormato de Solicitud de Actualizaciones y Novedades - para V3Anonymous s7OBO550% (2)
- Manual SpssDocumento65 páginasManual SpssSelma A. VasquezAún no hay calificaciones
- Balance de Carga EIGRPDocumento9 páginasBalance de Carga EIGRPnestor833Aún no hay calificaciones
- Diseño de Carreteras Con Eagle Point 2001 PDFDocumento117 páginasDiseño de Carreteras Con Eagle Point 2001 PDFvethoAún no hay calificaciones
- Portafolio WORD MatematicasDocumento29 páginasPortafolio WORD MatematicasRodriguez Martinez SergioAún no hay calificaciones
- Practico 3 AulaDocumento4 páginasPractico 3 Aulanicolas100% (3)
- El Enigma de La Inteligencia Artificial - Daniel Jara - Bryan InfanteDocumento3 páginasEl Enigma de La Inteligencia Artificial - Daniel Jara - Bryan InfanteAnonymous PR4Am9ZzgTAún no hay calificaciones
- Evaluacion 1. Modelos Probabilisticos. Luis Suárez 29.680.959Documento7 páginasEvaluacion 1. Modelos Probabilisticos. Luis Suárez 29.680.959Tibisay De Suárez SilvaAún no hay calificaciones
- Solucionario PRÁCTICA C N°1. - A - 2023Documento6 páginasSolucionario PRÁCTICA C N°1. - A - 2023NOELIA ARANA BAUTISTAAún no hay calificaciones
- Sesion 5Documento33 páginasSesion 5DiegoAún no hay calificaciones
- Recursos en PROJECTDocumento28 páginasRecursos en PROJECTluisAún no hay calificaciones
- Computadores para Educar en ColombiaDocumento15 páginasComputadores para Educar en ColombiarafamunAún no hay calificaciones
- Guia Rapida MysqlDocumento5 páginasGuia Rapida MysqlmanuelsempaiAún no hay calificaciones
- Siemens NX 9.0.1.3 MR1 Update - Arkanosant CoDocumento3 páginasSiemens NX 9.0.1.3 MR1 Update - Arkanosant CoWilliam MontalvoAún no hay calificaciones
- Supervisión Basada en Sistemas MultiAgentes para El Control de Robots MóvilesDocumento8 páginasSupervisión Basada en Sistemas MultiAgentes para El Control de Robots MóvilesCarlos VivasAún no hay calificaciones
- Unidad 4Documento17 páginasUnidad 4Lilo JimenezAún no hay calificaciones
- Grupo # 4 Trabajo Final Informatica 1Documento10 páginasGrupo # 4 Trabajo Final Informatica 1Jean Carlos EncarnaciónAún no hay calificaciones
- Práctica 2 Arboles Semiarboles TransmisiónDocumento4 páginasPráctica 2 Arboles Semiarboles TransmisiónLuis Alberto Martin Escobar0% (1)
- Sistemas de Informacion en Gestion Logistica Cerámica Italia SDocumento19 páginasSistemas de Informacion en Gestion Logistica Cerámica Italia SELKINAún no hay calificaciones
- Diseño de Una CarreteraDocumento55 páginasDiseño de Una Carreterajulio cesar santisteban bancesAún no hay calificaciones
- Ensayo Evaluacion DocumentosDocumento2 páginasEnsayo Evaluacion DocumentosALEXANDER BASTIDASAún no hay calificaciones
- Formato de PQRSFDocumento1 páginaFormato de PQRSFMaria Monsalve100% (2)
- Estacion ManualDocumento2 páginasEstacion Manualtago_704714561Aún no hay calificaciones
- Sistemas Automatizados BAEDocumento8 páginasSistemas Automatizados BAEMauricio Senior RamírezAún no hay calificaciones