También podría gustarte
- Ejercicios Resueltos Efecto Doppler Ii PDFDocumento8 páginasEjercicios Resueltos Efecto Doppler Ii PDFJordy Toro Rojas67% (6)
- Movimiento Plano de Cuerpos RígidosDocumento12 páginasMovimiento Plano de Cuerpos RígidosALBERTO AYALA COAGUILA100% (2)
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Practica Camisa y SerpentinDocumento8 páginasPractica Camisa y SerpentinTzitzi Alvarez MendozaAún no hay calificaciones
- Vibraciones Mecanicas - WillyvalroDocumento37 páginasVibraciones Mecanicas - WillyvalroPedroAún no hay calificaciones
- Masa Suspendida (G)Documento11 páginasMasa Suspendida (G)magaly huamanAún no hay calificaciones
- Equilibrio 2020Documento50 páginasEquilibrio 2020David FernandezAún no hay calificaciones
- Dinamica de SolidosDocumento13 páginasDinamica de SolidosChyntia Minchan GutierrezAún no hay calificaciones
- Física I, Semana 13Documento12 páginasFísica I, Semana 13Mario MeroAún no hay calificaciones
- Dinamica Unidad 2Documento13 páginasDinamica Unidad 2Ricardo SotoAún no hay calificaciones
- Ficha Equilibrio RotacionalDocumento4 páginasFicha Equilibrio RotacionalSaraAún no hay calificaciones
- 8EPDocumento1 página8EPJOSE NOCELO TETZOPAAún no hay calificaciones
- Expo Trabajo y Energia Del Solido RigidoDocumento28 páginasExpo Trabajo y Energia Del Solido RigidoMacoCarlosErickAún no hay calificaciones
- Cinética Plana de Un Cuerpo RígidoDocumento14 páginasCinética Plana de Un Cuerpo RígidoAlberto Chamo AyalaAún no hay calificaciones
- Practica de Laboratorio de Fisica EquilibrioDocumento8 páginasPractica de Laboratorio de Fisica EquilibrioyoelAún no hay calificaciones
- Guia de Laboratorio 1Documento10 páginasGuia de Laboratorio 1María José Perales SierraAún no hay calificaciones
- Lab Mov. Armonico SimpleDocumento9 páginasLab Mov. Armonico Simplejuan david caicedoAún no hay calificaciones
- Física I, Semana 14 Torsión y M.IDocumento13 páginasFísica I, Semana 14 Torsión y M.IMario MeroAún no hay calificaciones
- Dinámica UNIDAD 4Documento18 páginasDinámica UNIDAD 4Xchelyairs HernandezAún no hay calificaciones
- ESTAT 2 1 Equilibrio Particula 2DDocumento9 páginasESTAT 2 1 Equilibrio Particula 2DJose Sierra SAún no hay calificaciones
- Practica 4 Altura MetacentricaDocumento5 páginasPractica 4 Altura MetacentricaVan SanchezAún no hay calificaciones
- Resume N Mecanic ADocumento9 páginasResume N Mecanic ADiego Tafur LópezAún no hay calificaciones
- ResumenDocumento6 páginasResumenmayatovarhotmail.comAún no hay calificaciones
- Movimiento Plano en Cuerpos Rígidos.Documento18 páginasMovimiento Plano en Cuerpos Rígidos.liberenanelsondelrodeoAún no hay calificaciones
- Principio de DÁlembertDocumento2 páginasPrincipio de DÁlembertRamirez Ruben100% (1)
- Semana #04Documento20 páginasSemana #04Arleth MendozaAún no hay calificaciones
- Sesion 3Documento42 páginasSesion 3teylor suarezAún no hay calificaciones
- 4 Cinetica RigidosbDocumento31 páginas4 Cinetica RigidosbJean Carlos VillegasAún no hay calificaciones
- Trabajo de Dinamica de Eliomar AcuñaDocumento11 páginasTrabajo de Dinamica de Eliomar AcuñaEliomarAún no hay calificaciones
- Informe 3Documento12 páginasInforme 3Zet Haud FormAún no hay calificaciones
- DINAMICA. Estatica y EquilibrioDocumento8 páginasDINAMICA. Estatica y EquilibrioDaniella Lavanderos GomezAún no hay calificaciones
- DINAMICA - S11 - PPT - Ecuaciones Del Mov de Un Cuerpo RigidoDocumento15 páginasDINAMICA - S11 - PPT - Ecuaciones Del Mov de Un Cuerpo Rigidojair cantaro pabloAún no hay calificaciones
- Ejercicios Tolerancias Carlos IIIDocumento15 páginasEjercicios Tolerancias Carlos IIILuis Alfredo VilcaAún no hay calificaciones
- Ecuaciones Del Movimiento de Un Cuerpo RígidoDocumento30 páginasEcuaciones Del Movimiento de Un Cuerpo RígidoOscar EmilioAún no hay calificaciones
- Diapo Meca 2Documento22 páginasDiapo Meca 2Jheison Eliacer Quispe HolguinAún no hay calificaciones
- Cinética de Cuerpos Rígidos en Movimiento - InvestigacionDocumento8 páginasCinética de Cuerpos Rígidos en Movimiento - InvestigacionTamar evansAún no hay calificaciones
- Est A Tic ADocumento15 páginasEst A Tic AJuDhy Vásquez ParedesAún no hay calificaciones
- 1 3 1Documento18 páginas1 3 1Carlos JiménezAún no hay calificaciones
- 20 Investigación U4 4M1 OrtizlunaDocumento36 páginas20 Investigación U4 4M1 OrtizlunaJuan Carlos LunaAún no hay calificaciones
- FÍSICA - 3eros AñosDocumento6 páginasFÍSICA - 3eros Añosciclobasicohuergo0% (1)
- Unidad 1 Estática Sem12021Documento7 páginasUnidad 1 Estática Sem12021miguelAún no hay calificaciones
- Dinamica 1Documento42 páginasDinamica 1Joel50% (2)
- Pendulo FisicoDocumento5 páginasPendulo FisicoYonatan MorenoAún no hay calificaciones
- 18C, Rigido - Trab e ImpulsoDocumento16 páginas18C, Rigido - Trab e ImpulsoAbril RivasAún no hay calificaciones
- Unidad 2Documento12 páginasUnidad 2Emmanuel VillegasAún no hay calificaciones
- Apuntes Sobre Movimiento Armónico SimpleDocumento6 páginasApuntes Sobre Movimiento Armónico SimpleFrancisco José GarcíaAún no hay calificaciones
- Pendulo Fisico.Documento8 páginasPendulo Fisico.jstiannAún no hay calificaciones
- Capitulo IV Estatica IIDocumento49 páginasCapitulo IV Estatica IIQuispe RonaldAún no hay calificaciones
- Ley de HookeDocumento9 páginasLey de HookeValentina PetroAún no hay calificaciones
- Universidad Peninsula de Santa Elena Facultad de Ciencias de La Ingenieria Ingenieria Civil CURSO: 1/2Documento44 páginasUniversidad Peninsula de Santa Elena Facultad de Ciencias de La Ingenieria Ingenieria Civil CURSO: 1/2AdrianaAún no hay calificaciones
- Movimiento Armonico Simple Informe Fisica IiiDocumento7 páginasMovimiento Armonico Simple Informe Fisica Iiisavm94Aún no hay calificaciones
- S12 - Cinética Plana Cuerpo Rígido - Método Trabajo y EnergíaDocumento11 páginasS12 - Cinética Plana Cuerpo Rígido - Método Trabajo y EnergíaJOSHEP13Aún no hay calificaciones
- CLASE4Documento24 páginasCLASE4yaremi MejiaAún no hay calificaciones
- Ecuaciones de Movimiento 1Documento14 páginasEcuaciones de Movimiento 1Luis Huaman QuispeAún no hay calificaciones
- Cap 6Documento27 páginasCap 6Dream BigAún no hay calificaciones
- Practico 3 Modulo 1 de DinamicaDocumento4 páginasPractico 3 Modulo 1 de DinamicaOlga Katerin OrtegaAún no hay calificaciones
- RodaduraDocumento6 páginasRodaduraLis DallanAún no hay calificaciones
- Semana 6 Fisica10 - 2021Documento6 páginasSemana 6 Fisica10 - 2021Amadora RAún no hay calificaciones
- Unidad 3Documento12 páginasUnidad 3sergio riosAún no hay calificaciones
- Trabajo de ExposicionesDocumento50 páginasTrabajo de ExposicionesDream BigAún no hay calificaciones
- Gráficos de torno: Explorando la manipulación visual en gráficos de torno a través de visión por computadoraDe EverandGráficos de torno: Explorando la manipulación visual en gráficos de torno a través de visión por computadoraAún no hay calificaciones
- Introducción A La Ingeniería CivilDocumento20 páginasIntroducción A La Ingeniería CivilPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Examen Parcial I - Tutoria Grupo 5Documento3 páginasExamen Parcial I - Tutoria Grupo 5PIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Practica 04-2022-IDocumento1 páginaPractica 04-2022-IPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Examen I Unidad - GC-2022-IDocumento1 páginaExamen I Unidad - GC-2022-IPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
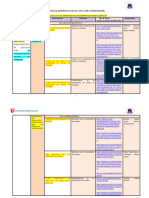
- Matriz de Dispersión Temática e Índice 2022-IDocumento5 páginasMatriz de Dispersión Temática e Índice 2022-IPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Cinematicas de Particulas UcvDocumento4 páginasCinematicas de Particulas UcvPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Bcentralfcfm, Journal Manager, 34878-119595-1-CEDocumento8 páginasBcentralfcfm, Journal Manager, 34878-119595-1-CEPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Contaminacion de Las Aguas Del MarDocumento16 páginasContaminacion de Las Aguas Del MarPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Predimensionamiento 64846 Downloadable 4685087Documento21 páginasPredimensionamiento 64846 Downloadable 4685087PIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Marco TeóricoDocumento2 páginasMarco TeóricoPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Silabo Estructuras y CargasDocumento5 páginasSilabo Estructuras y CargasPIERO ALEXANDER SALAZAR ZAVALETAAún no hay calificaciones
- Guia de Ondas Repaso 2 MedioDocumento4 páginasGuia de Ondas Repaso 2 Medioluis pintoAún no hay calificaciones
- 1 - Control N°1Documento9 páginas1 - Control N°1Seba FuentesAún no hay calificaciones
- Intercambiadores de Calor.Documento12 páginasIntercambiadores de Calor.Joan LimónAún no hay calificaciones
- RADIACIÓNDocumento31 páginasRADIACIÓNLuis Angel Ortiz LangoAún no hay calificaciones
- Bloque 4 - Ondas. Problemas: Centro de Estudios Murcia Telf.: 968 90 60 22 - 676 42 38 62 La Flota, 10, MurciaDocumento3 páginasBloque 4 - Ondas. Problemas: Centro de Estudios Murcia Telf.: 968 90 60 22 - 676 42 38 62 La Flota, 10, MurciaCarmen TravelAún no hay calificaciones
- Cartilla N°3-Cinemática - M.R.U.V.Documento6 páginasCartilla N°3-Cinemática - M.R.U.V.gustaburgoAún no hay calificaciones
- Analisis Termoestructural ANSYSDocumento0 páginasAnalisis Termoestructural ANSYSmowli_777Aún no hay calificaciones
- Problemas Cap. V - ViDocumento18 páginasProblemas Cap. V - ViAlexander TRAún no hay calificaciones
- Tarea 1 TDC Francisco Mora 201141552-3Documento9 páginasTarea 1 TDC Francisco Mora 201141552-3Francisco MoraAún no hay calificaciones
- Lab 4. Ondas SonorasDocumento8 páginasLab 4. Ondas SonorasJose Leonardo Quitiaquez MarinAún no hay calificaciones
- Practica Fisica I - Semana 03Documento9 páginasPractica Fisica I - Semana 03Jhonithas JbqAún no hay calificaciones
- Clase 2 Talleres Lumen LauraDocumento40 páginasClase 2 Talleres Lumen LaurasakukinaAún no hay calificaciones
- Deformación Por FlexiónDocumento7 páginasDeformación Por FlexiónRichard CJAún no hay calificaciones
- ProblemasDocumento51 páginasProblemas73741977Aún no hay calificaciones
- SolucionDocumento6 páginasSolucionCAMILO ANDRESAún no hay calificaciones
- T5 - Radiación No IonizanteDocumento8 páginasT5 - Radiación No IonizanteSTEFANNY LIZBETH DE LA CRUZ ESPINOZAAún no hay calificaciones
- FÍSICA - S16T - Ondas ElectromagneticasDocumento3 páginasFÍSICA - S16T - Ondas ElectromagneticasTreicy OjedaAún no hay calificaciones
- Lab Fis 2 - Ondas Estacionarias en Una CuerdaDocumento9 páginasLab Fis 2 - Ondas Estacionarias en Una CuerdaJuan JoseAún no hay calificaciones
- Consulta Conveccion ConduccionDocumento6 páginasConsulta Conveccion ConduccionJuan David TAAún no hay calificaciones
- MA641 S07 DC2 REC1 Ondas Mecanicas PREGDocumento4 páginasMA641 S07 DC2 REC1 Ondas Mecanicas PREGDino Iván Pérez VásquezAún no hay calificaciones
- Calentador - MasterTemp - High - Performance - Heater - SpanishDocumento4 páginasCalentador - MasterTemp - High - Performance - Heater - SpanishGuillermo MeloAún no hay calificaciones
- Aplicaciones de Ingenieria y Fenomenos de Transporte Al Estudio de La Transferencia Convectiva de Calor en Los Alimentos EnvasadosDocumento11 páginasAplicaciones de Ingenieria y Fenomenos de Transporte Al Estudio de La Transferencia Convectiva de Calor en Los Alimentos EnvasadosCrisFrostAún no hay calificaciones
- Fenomenología de OndasDocumento8 páginasFenomenología de OndasPaula Alejandra Sandoval MorenoAún no hay calificaciones
- Sesion 5-Doble Efecto Simple PDFDocumento25 páginasSesion 5-Doble Efecto Simple PDFROSA KATHERINE SALAS SILVAAún no hay calificaciones
- Físia para IngenieríaDocumento15 páginasFísia para IngenieríaCarlos Rodriguez OrtaAún no hay calificaciones
- Velocidad de Fase Informe 6Documento6 páginasVelocidad de Fase Informe 6Generith Bolaño0% (1)
- Ayudantía 2 - SoluciónDocumento5 páginasAyudantía 2 - SoluciónEduards Moises Triviño VildósolaAún no hay calificaciones