0% encontró este documento útil (0 votos)
79 vistas32 páginasPropiedades y operaciones de matrices
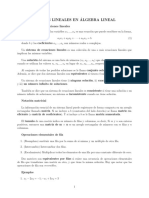
El documento describe propiedades de las operaciones con matrices. 1) Explica propiedades como conmutativa, asociativa, identidad, distributiva e inversa para sumas y multiplicaciones de matrices. 2) Detalla cómo verificar si una matriz es la inversa de otra y propiedades de las matrices inversas. 3) Presenta operaciones elementales de filas para resolver sistemas de ecuaciones lineales.
Cargado por
Leydy Payano GranadosDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PPTX, PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
79 vistas32 páginasPropiedades y operaciones de matrices
El documento describe propiedades de las operaciones con matrices. 1) Explica propiedades como conmutativa, asociativa, identidad, distributiva e inversa para sumas y multiplicaciones de matrices. 2) Detalla cómo verificar si una matriz es la inversa de otra y propiedades de las matrices inversas. 3) Presenta operaciones elementales de filas para resolver sistemas de ecuaciones lineales.
Cargado por
Leydy Payano GranadosDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PPTX, PDF, TXT o lee en línea desde Scribd