También podría gustarte
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Proyecto Robot LaberintoDocumento12 páginasProyecto Robot LaberintoAleXander DiiazAún no hay calificaciones
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDe EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Tipos y Características de RobotsDocumento32 páginasTipos y Características de RobotsGray Kwon Fullbuster100% (1)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Control de Robot Con Sensores de Distancia DIAGRAMAS BLOQUESDocumento7 páginasControl de Robot Con Sensores de Distancia DIAGRAMAS BLOQUESEsteban FernandoAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Informe2 Presentacion DiseñoDocumento9 páginasInforme2 Presentacion DiseñoEIEEAún no hay calificaciones
- Conceptos de Robótica IndustrialDocumento39 páginasConceptos de Robótica IndustrialDiego CandoAún no hay calificaciones
- Carrito Seguidor de LineaDocumento22 páginasCarrito Seguidor de LineaAlejandro RodriguezAún no hay calificaciones
- Taller para Seguidor de LineaDocumento48 páginasTaller para Seguidor de LineaAngelRuben Hernandez100% (1)
- Robot SumoDocumento10 páginasRobot Sumojose.cerrograndeAún no hay calificaciones
- AutomatasDocumento10 páginasAutomatasstephannya ArcinegasAún no hay calificaciones
- Reporte Seguidor de LineaDocumento11 páginasReporte Seguidor de Lineabryan jaret vargas gomezzAún no hay calificaciones
- Ensayo Construccion de Un Robot MovilDocumento9 páginasEnsayo Construccion de Un Robot MovilAndre LoeraAún no hay calificaciones
- Sistema de Control - (Carrito Seguidor de Linea)Documento16 páginasSistema de Control - (Carrito Seguidor de Linea)Ronaldo MendietaAún no hay calificaciones
- Presentacion de RobóticaDocumento155 páginasPresentacion de RobóticaEmma SantanaAún no hay calificaciones
- Carro Seguidor de LineaDocumento9 páginasCarro Seguidor de LineaCharly ArizmendiAún no hay calificaciones
- LABERINTODocumento8 páginasLABERINTOSamuel ChimborazoAún no hay calificaciones
- Seguidor de línea con PIC y sensores ópticosDocumento22 páginasSeguidor de línea con PIC y sensores ópticosmikelkatenaAún no hay calificaciones
- Sistema Parqueadero Digital Con Contador de Entrada y SalidaDocumento9 páginasSistema Parqueadero Digital Con Contador de Entrada y Salidaleodorado0% (1)
- Clase 1 RoboticaDocumento20 páginasClase 1 Roboticaangelf_oaAún no hay calificaciones
- Tesis ResumenesDocumento4 páginasTesis ResumenesDiego GuevaraAún no hay calificaciones
- Reporte Seguidor de LineaDocumento16 páginasReporte Seguidor de LineaJaime LMAún no hay calificaciones
- Presentacion Eq.2Documento15 páginasPresentacion Eq.2wSxpreme OficialAún no hay calificaciones
- Robot LaberDocumento10 páginasRobot LaberYandry JácomeAún no hay calificaciones
- Articulo LibreDocumento12 páginasArticulo LibreCortazar CesarAún no hay calificaciones
- Diseño y Construcción de Un Robot Seguidor de LíneaDocumento8 páginasDiseño y Construcción de Un Robot Seguidor de LíneaDeyvis Gonzales Guevara0% (1)
- Aplicacion Pick and Place - Inspeccion PDFDocumento18 páginasAplicacion Pick and Place - Inspeccion PDFjoseAún no hay calificaciones
- Reporte HexápodoDocumento8 páginasReporte HexápodoRosendo de OzAún no hay calificaciones
- Informe Encoder Optico 1Documento8 páginasInforme Encoder Optico 1Gustavo QuicaliquinAún no hay calificaciones
- Proyecto Seguidor de LineaDocumento5 páginasProyecto Seguidor de LineaAlex BarcoAún no hay calificaciones
- Investigacion InstrumentacionDocumento7 páginasInvestigacion InstrumentacionClariza BravoAún no hay calificaciones
- ROB100Documento7 páginasROB100neomarbrachoAún no hay calificaciones
- Unidad 2Documento62 páginasUnidad 2Alejandro Gonzalez GonzalezAún no hay calificaciones
- Informe IEEE de Robot Sumo (Cronos)Documento10 páginasInforme IEEE de Robot Sumo (Cronos)Julian Prieto Riveros100% (2)
- Practica 1 - EstacionamientoDocumento4 páginasPractica 1 - Estacionamientorodolfo ramirezAún no hay calificaciones
- Proyecto Radar Deterctor Con Microcontrolador STM32Documento7 páginasProyecto Radar Deterctor Con Microcontrolador STM32DecimePibeEspadaSiñaniAún no hay calificaciones
- Actividades Atención A La DiversidadDocumento5 páginasActividades Atención A La DiversidadJuan Luis Moya RodríguezAún no hay calificaciones
- Programación de Un Robot IndustrialDocumento27 páginasProgramación de Un Robot IndustrialPaúl MartínezAún no hay calificaciones
- SABER 3 Unidad 2 ElizaldeDocumento13 páginasSABER 3 Unidad 2 ElizaldeJosé Manuel Ávila LaraAún no hay calificaciones
- Robot BalancinDocumento29 páginasRobot BalancinBryan VargasAún no hay calificaciones
- U2 - REPORTE DE PRACTICA NUM. 2Documento11 páginasU2 - REPORTE DE PRACTICA NUM. 2FERNANDEZ MORALES EDSON YAHIRAún no hay calificaciones
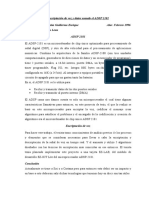
- Giraa 01 PDFDocumento9 páginasGiraa 01 PDFKaren Sofia Torres MartinezAún no hay calificaciones
- Articulo Técnico - Carlos Tobajas GarcíaDocumento4 páginasArticulo Técnico - Carlos Tobajas GarcíaDiego de la CruzAún no hay calificaciones
- E3 Sensores y Actuadores PiaDocumento20 páginasE3 Sensores y Actuadores PiaJorge MendezAún no hay calificaciones
- Documento LaberintoDocumento6 páginasDocumento LaberintoFrancisco ali Amet barajasAún no hay calificaciones
- Mini SumoDocumento8 páginasMini Sumochio cardenasAún no hay calificaciones
- Proyecto SumoDocumento7 páginasProyecto SumoAlex BarcoAún no hay calificaciones
- Cuestionario de Robotica 4Documento5 páginasCuestionario de Robotica 4Jerry MercyAún no hay calificaciones
- Evidencia 1 PDFDocumento7 páginasEvidencia 1 PDFDiego Beltrán De la PazAún no hay calificaciones
- Paso 3Documento11 páginasPaso 3Jimmy francoAún no hay calificaciones
- Unidad 4. Robotica. Sistemas de Control y Motores de ImpulsiónDocumento39 páginasUnidad 4. Robotica. Sistemas de Control y Motores de ImpulsiónAlberto CarranzaAún no hay calificaciones
- Trabajo Colaborativo 1 Fase 1 y Fase 2 RoboticaDocumento15 páginasTrabajo Colaborativo 1 Fase 1 y Fase 2 RoboticaMauricio RodriguezAún no hay calificaciones
- Diseño e Implementación Un Sistema Inteligente en Un Robot para El Seguimiento de TrayectoriaDocumento17 páginasDiseño e Implementación Un Sistema Inteligente en Un Robot para El Seguimiento de TrayectoriaPerccy CastilloAún no hay calificaciones
- Diseño e implementación de un robot sumo de 3KgDocumento10 páginasDiseño e implementación de un robot sumo de 3KgCarlos SánchezAún no hay calificaciones
- RoboticaDocumento4 páginasRoboticaBrady castillo reynosoAún no hay calificaciones
- Presentacin2 140626120145 Phpapp01Documento8 páginasPresentacin2 140626120145 Phpapp01Omar Agustin Salas EspinoAún no hay calificaciones
- Robotino Practica 4 de Avance y GirosDocumento5 páginasRobotino Practica 4 de Avance y GirosQuesos HwAún no hay calificaciones
- SENSORES DigitalesDocumento5 páginasSENSORES DigitalesLis VergaraAún no hay calificaciones
- Modelado de Sistemas FisiologicosDocumento109 páginasModelado de Sistemas FisiologicosNancyJuárezAún no hay calificaciones
- Proyecto ControlDocumento38 páginasProyecto ControlMilton EspinozaAún no hay calificaciones
- Semana 3 - Sistemas de Control II - ContenidosDocumento19 páginasSemana 3 - Sistemas de Control II - ContenidosJavi PintoAún no hay calificaciones
- Desarrollo de Módulo de Entrenamiento en Control PIDDocumento25 páginasDesarrollo de Módulo de Entrenamiento en Control PIDchristhianAún no hay calificaciones
- Serie 870 Manual de InstruccionesDocumento9 páginasSerie 870 Manual de Instruccionesalexis oliveraAún no hay calificaciones
- Bancos de Potencia ESP v0208Documento9 páginasBancos de Potencia ESP v0208Tecnicas Reunidas de Automoción100% (1)
- Selección Del ControladorDocumento8 páginasSelección Del ControladorDamián G.S.Aún no hay calificaciones
- Control PIDDocumento5 páginasControl PIDRosy Andrea NicolasAún no hay calificaciones
- Simbologia Protocolos de ComunicacionesDocumento63 páginasSimbologia Protocolos de ComunicacionesJULIAN GUILLERMO ORTIZ TRUJILLOAún no hay calificaciones
- Convertidores Industriales-Programa de Control Primario ACS880Documento284 páginasConvertidores Industriales-Programa de Control Primario ACS880Jose Manuel Vazquez ZarcoAún no hay calificaciones
- Apunte Sistemas de ControlDocumento73 páginasApunte Sistemas de ControlLucho SeriAún no hay calificaciones
- Control de Brazo Robótico de 5 Grados de LibertadDocumento15 páginasControl de Brazo Robótico de 5 Grados de LibertadVictor CondoriAún no hay calificaciones
- Sílabo Control Automático 2018-IDocumento17 páginasSílabo Control Automático 2018-IFidel Andía GuzmánAún no hay calificaciones
- SG Pump Control FRN Hvac Es 1 1 1 PDFDocumento37 páginasSG Pump Control FRN Hvac Es 1 1 1 PDFMileAún no hay calificaciones
- Comparación Sistemas de Control MPC y Pid de Temperatura en Máquina Extrusora de Poliestireno ExpandibleDocumento10 páginasComparación Sistemas de Control MPC y Pid de Temperatura en Máquina Extrusora de Poliestireno ExpandiblemateoAún no hay calificaciones
- Componentes de Un Controlador PIDDocumento3 páginasComponentes de Un Controlador PIDRicardo A VergaraAún no hay calificaciones
- Capítulo 6P-E Respuesta Estado Transitorio TssDocumento39 páginasCapítulo 6P-E Respuesta Estado Transitorio TssJoshua GonzalezAún no hay calificaciones
- Procesos C Sincronizacion Segunda Parte 22205 Completo PDFDocumento26 páginasProcesos C Sincronizacion Segunda Parte 22205 Completo PDFAlexander AmaralAún no hay calificaciones
- Control PID de un circuito RLCDocumento7 páginasControl PID de un circuito RLCMarisol Tancara RoqueAún no hay calificaciones
- ELO 377 Control Por Torque Calculado de Un Robot SCARA de 3DOFDocumento5 páginasELO 377 Control Por Torque Calculado de Un Robot SCARA de 3DOFSebastián Céspedes SegoviaAún no hay calificaciones
- Ajuste Manual de Control PIDDocumento5 páginasAjuste Manual de Control PIDdojilig100% (1)
- U1 InstrumentaciónDocumento97 páginasU1 InstrumentaciónSenku PoncianoAún no hay calificaciones
- Informe Proyecto Cloro Soda PDFDocumento245 páginasInforme Proyecto Cloro Soda PDFJORDYAún no hay calificaciones
- Paper ControladoresDocumento5 páginasPaper ControladoresSantiago JiménezAún no hay calificaciones
- Estado Del ArteDocumento3 páginasEstado Del Arteandrea gAún no hay calificaciones
- Control PID en circuito electrónicoDocumento13 páginasControl PID en circuito electrónicoMartín SilvestreAún no hay calificaciones
- ControladorDocumento7 páginasControladorMiguel Angel Forero ParraAún no hay calificaciones
- Lab 07Documento17 páginasLab 07Omar Cruz100% (1)
- Ajuste Regimen RPM Ge VodiaDocumento6 páginasAjuste Regimen RPM Ge VodiaEdward De La CruzAún no hay calificaciones
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- La autopsia psicológica: Psicotanatología forenseDe EverandLa autopsia psicológica: Psicotanatología forenseAún no hay calificaciones
- Suicidología: Prevención, tratamiento psicológico e investigación de procesos suicidasDe EverandSuicidología: Prevención, tratamiento psicológico e investigación de procesos suicidasCalificación: 5 de 5 estrellas5/5 (7)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)
- La curación espontánea de las creencias: Cómo librarse de los falsos límitesDe EverandLa curación espontánea de las creencias: Cómo librarse de los falsos límitesCalificación: 4.5 de 5 estrellas4.5/5 (22)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- Neuropsicología: Los fundamentos de la materiaDe EverandNeuropsicología: Los fundamentos de la materiaCalificación: 5 de 5 estrellas5/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- UF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)De EverandUF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)Calificación: 2 de 5 estrellas2/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Estadística aplicada a la ingeniería y los negociosDe EverandEstadística aplicada a la ingeniería y los negociosCalificación: 3.5 de 5 estrellas3.5/5 (8)