También podría gustarte
- Modelado Bola BarraDocumento22 páginasModelado Bola BarraJosé Victor Zaconeta FloresAún no hay calificaciones
- 1ra Simulacion - Cruise Control - AvanceDocumento56 páginas1ra Simulacion - Cruise Control - AvanceGianfranco Villanueva Diaz100% (2)
- Ejercicios Controladores PidDocumento71 páginasEjercicios Controladores PidJosue Tuz Poot100% (2)
- Laboratorio 05Documento10 páginasLaboratorio 05Nick Stiven Aguilar HuarangaAún no hay calificaciones
- Controlador en El Espacio de Estados para Un Sistema de Suspensión de Un AutobusDocumento10 páginasControlador en El Espacio de Estados para Un Sistema de Suspensión de Un AutobusFrank Huaylinos VelasquezAún no hay calificaciones
- Tecnicas de Vacio en La ManipulacionDocumento130 páginasTecnicas de Vacio en La ManipulacionmayguerAún no hay calificaciones
- Arrancador Suave para Bomba de Pozo de Agua Potable (Diagrama de Cableado, Ejemplo de Solución de Problemas)Documento9 páginasArrancador Suave para Bomba de Pozo de Agua Potable (Diagrama de Cableado, Ejemplo de Solución de Problemas)Gary Hans Aüe Antelo100% (2)
- Taller. Preconceptos CVDocumento3 páginasTaller. Preconceptos CVNICOLAS MAURICIO CRIADO BERMUDEZAún no hay calificaciones
- El Péndulo InvertidoDocumento14 páginasEl Péndulo InvertidoAndre Santiago Vega QuispeAún no hay calificaciones
- Pendulo Invertido AnalisisDocumento3 páginasPendulo Invertido AnalisisSebastian SaltosAún no hay calificaciones
- Ejercicios Controladores PidDocumento70 páginasEjercicios Controladores PidJulita Nelson GordonAún no hay calificaciones
- CTM Ejemplo - Respuesta en Frecuencia - Control Del Péndulo Invertido PDFDocumento11 páginasCTM Ejemplo - Respuesta en Frecuencia - Control Del Péndulo Invertido PDFWilson Barco MAún no hay calificaciones
- CTM Ejemplo - Péndulo Invertido - Modelación PDFDocumento8 páginasCTM Ejemplo - Péndulo Invertido - Modelación PDFWilson Barco MAún no hay calificaciones
- Pendulo InvertidoDocumento6 páginasPendulo InvertidoAndrewx PereaAún no hay calificaciones
- Control Ejercicios de PidDocumento66 páginasControl Ejercicios de PidMundoPic MundoPicAún no hay calificaciones
- Proyecto FinalDocumento16 páginasProyecto FinalMiguel CastroAún no hay calificaciones
- CTM Ejemplo - Control PID Del Modelo Del Péndulo Invertido PDFDocumento8 páginasCTM Ejemplo - Control PID Del Modelo Del Péndulo Invertido PDFWilson Barco MAún no hay calificaciones
- Diseño de Controladores y ObservadoresDocumento11 páginasDiseño de Controladores y ObservadoresOmar Gibrahin Hernandez UribeAún no hay calificaciones
- 01 Guia 01 Control Crucero.Documento41 páginas01 Guia 01 Control Crucero.Raul SullaAún no hay calificaciones
- Suspencion de Un BusDocumento20 páginasSuspencion de Un BusOscar Javier RojasAún no hay calificaciones
- CTM - Ejemplo de Control Digital - Péndulo Invertido PDFDocumento14 páginasCTM - Ejemplo de Control Digital - Péndulo Invertido PDFWilson Barco MAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Trabajo Final ElectromecanicaDocumento19 páginasTrabajo Final ElectromecanicaJesse MauricioAún no hay calificaciones
- Control VTOL SISODocumento22 páginasControl VTOL SISOJason GreenAún no hay calificaciones
- Tutorial PID EspanolDocumento8 páginasTutorial PID EspanolRamiro Cruz SimbaAún no hay calificaciones
- Aviones PitchDocumento82 páginasAviones PitchjuniorAún no hay calificaciones
- Variante en El Algoritmo PidDocumento5 páginasVariante en El Algoritmo PidCarlos OliveiraAún no hay calificaciones
- Modelos Matematicos y Funciones de TransferenciaDocumento12 páginasModelos Matematicos y Funciones de TransferenciaFHERFFFAún no hay calificaciones
- Efectos Del PidDocumento6 páginasEfectos Del PidRodrigo Zarate MartinezAún no hay calificaciones
- SIMULINK - EcuacionesDocumento11 páginasSIMULINK - EcuacionesIan Alexander LopezAún no hay calificaciones
- Pendulo Invertido ModeladoDocumento6 páginasPendulo Invertido ModeladoSebastian SaltosAún no hay calificaciones
- CTM Ejemplo - Diseño en Espacio de Estado para El Péndulo Invertido PDFDocumento9 páginasCTM Ejemplo - Diseño en Espacio de Estado para El Péndulo Invertido PDFWilson Barco MAún no hay calificaciones
- Scilab control sistemas modelo transferencia estabilidadDocumento6 páginasScilab control sistemas modelo transferencia estabilidadAizprua LuisAún no hay calificaciones
- Guia Escalon UnitarioDocumento8 páginasGuia Escalon UnitarioAnthony Saavedra GarciaAún no hay calificaciones
- Introduccion PIDDocumento8 páginasIntroduccion PIDjesusdruizvAún no hay calificaciones
- Lab 7.0Documento20 páginasLab 7.0Paula MéndezAún no hay calificaciones
- Ejemplo de Cálculo Numérico de La Integral de Duhamel Con MatlabDocumento9 páginasEjemplo de Cálculo Numérico de La Integral de Duhamel Con MatlabJose Ivan CarrilloAún no hay calificaciones
- Sugerencias Generales para El Diseño Del Controlador PIDDocumento35 páginasSugerencias Generales para El Diseño Del Controlador PIDgeoswaldAún no hay calificaciones
- Diseño de ley de control y estimadores para un sistema mecatrónicoDocumento18 páginasDiseño de ley de control y estimadores para un sistema mecatrónicoAnthonyVelasquezMirandaAún no hay calificaciones
- Modelo Dinámico UPIITA PrácticaDocumento15 páginasModelo Dinámico UPIITA PrácticaAbisay Meléndez González100% (1)
- Control DC Motor FuzzyDocumento9 páginasControl DC Motor FuzzyFerdy Casaverde LopezAún no hay calificaciones
- Control Discreto de Motor DCDocumento6 páginasControl Discreto de Motor DCJavier Jose Salgado RodriguezAún no hay calificaciones
- Ejercicios de Modelado en MatlabDocumento37 páginasEjercicios de Modelado en MatlabWilliam RoaAún no hay calificaciones
- Laboratorio 7 MT227 2011 1Documento15 páginasLaboratorio 7 MT227 2011 1Jherson Marchan Trinidad100% (1)
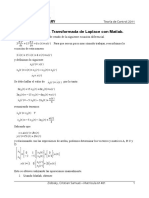
- Transformada de Laplace Con MatlabDocumento7 páginasTransformada de Laplace Con MatlabJavier Lozano MarrerosAún no hay calificaciones
- Guia 01 Control Crucero.Documento39 páginasGuia 01 Control Crucero.Liam Siles NuñezAún no hay calificaciones
- Análisis temporal respuesta sistema excitado señales pruebaDocumento18 páginasAnálisis temporal respuesta sistema excitado señales pruebaxvidAún no hay calificaciones
- Análisis del Sistema de Pitch del Avión con MATLABDocumento82 páginasAnálisis del Sistema de Pitch del Avión con MATLABEddy AtahuichiAún no hay calificaciones
- Practica2 Espinoza RodriguezDocumento12 páginasPractica2 Espinoza RodriguezEduardo EspinozaAún no hay calificaciones
- CeduvirtSimulink PDFDocumento33 páginasCeduvirtSimulink PDFArturo RawrAún no hay calificaciones
- Control Digital - FASE 3Documento13 páginasControl Digital - FASE 3Jose Elias Perafan Leal100% (1)
- Resumen Control IDDocumento6 páginasResumen Control IDMarcos David Perez QuintoAún no hay calificaciones
- Modelado de control analógico en SimulinkDocumento16 páginasModelado de control analógico en SimulinkJose BaqueroAún no hay calificaciones
- Pendulo InvertidoDocumento6 páginasPendulo InvertidoCarlos ReyesAún no hay calificaciones
- Practica 3. Espacio de EstadoDocumento21 páginasPractica 3. Espacio de EstadoLUISAún no hay calificaciones
- Lugar Ra Ices Diagram AbodeDocumento14 páginasLugar Ra Ices Diagram Abodemiloamaya1993Aún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Valvulas Direccionales PDFDocumento77 páginasValvulas Direccionales PDFWedneslao Lopez100% (4)
- Calculo y Dimensionamiento de Una Instalacion Frigorifica - FIMCPDocumento7 páginasCalculo y Dimensionamiento de Una Instalacion Frigorifica - FIMCPKatya Olguín MartínezAún no hay calificaciones
- Mantenimiento correctivo y tipos de averías en ingeniería mecánicaDocumento17 páginasMantenimiento correctivo y tipos de averías en ingeniería mecánicaVR DanAún no hay calificaciones
- Símbolos neumáticos ISO1219Documento4 páginasSímbolos neumáticos ISO1219Jaime MoncadaAún no hay calificaciones
- Ojo Revisar RefrigeracionDocumento239 páginasOjo Revisar RefrigeracionVR DanAún no hay calificaciones
- Contaminación en La OroyaDocumento2 páginasContaminación en La OroyaVR DanAún no hay calificaciones
- Mantenimiento Predictivo Virtual SenatiDocumento25 páginasMantenimiento Predictivo Virtual SenatiAlberto Jesus Escobar Guardia100% (1)
- Diseño y Simulación Del Sistema de Automatización y ControlDocumento157 páginasDiseño y Simulación Del Sistema de Automatización y Controlhheber97Aún no hay calificaciones
- Curso SSO Separata 01Documento29 páginasCurso SSO Separata 01VR DanAún no hay calificaciones
- Libro 1Documento2 páginasLibro 1VR DanAún no hay calificaciones
- Lubricacion General de ConversionDocumento59 páginasLubricacion General de ConversionVR DanAún no hay calificaciones
- Implementación de un sistema de purificación y reciclaje de aceite usadoDocumento14 páginasImplementación de un sistema de purificación y reciclaje de aceite usadoVR DanAún no hay calificaciones
- TQ1 002 - S Torque 820 Brochure - Spanish (Web)Documento16 páginasTQ1 002 - S Torque 820 Brochure - Spanish (Web)VR DanAún no hay calificaciones
- Diagrama-Ishikawa (1) 1Documento15 páginasDiagrama-Ishikawa (1) 1VR DanAún no hay calificaciones
- Procedimiento de Mantenimiento CorrectivoDocumento8 páginasProcedimiento de Mantenimiento Correctivojohn henry veracalderonAún no hay calificaciones
- Hidraulica BasicaDocumento161 páginasHidraulica Basicaangel_faria4054100% (2)
- Diagram A de IshikawaDocumento15 páginasDiagram A de IshikawaManuel Roberto Chirinos ValerAún no hay calificaciones
- 5 Analisis de ParetoDocumento24 páginas5 Analisis de ParetoObatala AnaAún no hay calificaciones
- Tornillo Normas DinDocumento147 páginasTornillo Normas DinManuel Sanchez QuispeAún no hay calificaciones
- AA Tecnica IshikawaDocumento5 páginasAA Tecnica IshikawaVR DanAún no hay calificaciones
- Ejercicio de Pareto y IshikawaDocumento13 páginasEjercicio de Pareto y IshikawaVR DanAún no hay calificaciones
- Proyecto Del Profe Gamarra.Documento35 páginasProyecto Del Profe Gamarra.VR DanAún no hay calificaciones
- Fotos de Tra de AguaDocumento22 páginasFotos de Tra de AguaVR DanAún no hay calificaciones
- PPTDocumento25 páginasPPTVR DanAún no hay calificaciones
- RodamientosDocumento24 páginasRodamientosFátimaRodríguezAún no hay calificaciones
- AA Tecnica IshikawaDocumento5 páginasAA Tecnica IshikawaVR DanAún no hay calificaciones
- Informe ASPEC Diciembre 2010Documento32 páginasInforme ASPEC Diciembre 2010Prosac Distribuidor Autorizado100% (1)
- Ajustes y ToleranciasDocumento84 páginasAjustes y ToleranciasAlexis Bravo100% (1)
- Rivera, S. (2010) - Violencias Encubiertas en Bolivia, Pachakuti Los Horizontes Históricos Del Colonialismo Interno.Documento33 páginasRivera, S. (2010) - Violencias Encubiertas en Bolivia, Pachakuti Los Horizontes Históricos Del Colonialismo Interno.Brenda Alejandra Fonseca ArizaAún no hay calificaciones
- Ejemplo Perfil Proyecto de GradoDocumento28 páginasEjemplo Perfil Proyecto de GradojhuniorAún no hay calificaciones
- Ventajas y Desventajas de La Cuna de AireDocumento3 páginasVentajas y Desventajas de La Cuna de AireAna Cadenillas OrtizAún no hay calificaciones
- Guía de Observación Pedagógica en La Práctica DocenteDocumento17 páginasGuía de Observación Pedagógica en La Práctica DocenteRoyer MendezAún no hay calificaciones
- Guia InterdisciplinariaDocumento6 páginasGuia InterdisciplinariaRene MenesesAún no hay calificaciones
- Fuentes de información sobre salud sexual y comportamientos de riesgo en adolescentesDocumento49 páginasFuentes de información sobre salud sexual y comportamientos de riesgo en adolescentesNallely BustamanteAún no hay calificaciones
- Lecture 2Documento153 páginasLecture 2EiligamAún no hay calificaciones
- Oraciones CompuestasDocumento21 páginasOraciones CompuestasLUÍS CARLOS ANCHILA VILLARAún no hay calificaciones
- Decreto #2837Documento11 páginasDecreto #2837anita coronelAún no hay calificaciones
- Tabla ComparativaDocumento1 páginaTabla ComparativaMaria Isabel Rodriguez TuyubAún no hay calificaciones
- DiferencialesDocumento3 páginasDiferencialesjoseAún no hay calificaciones
- BIOLOGIADocumento4 páginasBIOLOGIANicole RecabalAún no hay calificaciones
- Cerradura Electronica Codificad1Documento6 páginasCerradura Electronica Codificad1Jhon JairoAún no hay calificaciones
- La teoría de la equivalencia dinámica de Eugene A. Nida según su estudio de lenguas y culturasDocumento13 páginasLa teoría de la equivalencia dinámica de Eugene A. Nida según su estudio de lenguas y culturasUndercover ÁlvaroAún no hay calificaciones
- El Problema Del Conocimiento Como Objeto de EstudioDocumento1 páginaEl Problema Del Conocimiento Como Objeto de EstudioEnrique ValeraAún no hay calificaciones
- Aleta de PuenteDocumento19 páginasAleta de Puentevillena_cruzadoAún no hay calificaciones
- Dossier TEA PDFDocumento190 páginasDossier TEA PDFNayarettAún no hay calificaciones
- Ensayo de BiodiversidadDocumento7 páginasEnsayo de BiodiversidadVeronica RomeroAún no hay calificaciones
- Evolución del liderazgo 1920-1996Documento4 páginasEvolución del liderazgo 1920-1996diana martínAún no hay calificaciones
- Informe Carga CombustibleDocumento1 páginaInforme Carga CombustibleFrancisco Clavel DiazAún no hay calificaciones
- Trabajo de Cuenca Río CrisnejasDocumento4 páginasTrabajo de Cuenca Río CrisnejasJhony Villanueva CubasAún no hay calificaciones
- Etica CamilaDocumento4 páginasEtica CamilaCamila CardenasAún no hay calificaciones
- La música de los 60 cambió la historia musicalDocumento4 páginasLa música de los 60 cambió la historia musicalJessica SierraAún no hay calificaciones
- Administracion para PREPADocumento4 páginasAdministracion para PREPAMikeAún no hay calificaciones
- Teoría de colas: Modelos matemáticos para sistemas de líneas de esperaDocumento293 páginasTeoría de colas: Modelos matemáticos para sistemas de líneas de esperaSALMA MAGALÍ DE LA ROSA POSADASAún no hay calificaciones
- Simulación Gerencial - Examen final semana 8Documento14 páginasSimulación Gerencial - Examen final semana 8angellegAún no hay calificaciones
- 5.2.-Estudio de Trafico - Churubamba-Carretera Central (Limón Pampa) IMPRIMIRDocumento17 páginas5.2.-Estudio de Trafico - Churubamba-Carretera Central (Limón Pampa) IMPRIMIROmar Barboza VasquezAún no hay calificaciones
- LA SOCIOLOGIA DE LA MUERTE Trabajo de SociologiaDocumento2 páginasLA SOCIOLOGIA DE LA MUERTE Trabajo de SociologiaLudwing Adrian Milian GarciaAún no hay calificaciones