También podría gustarte
- Bella Rose, Leona Lee - Propiedad de Un Capo de La Mafia RusaDocumento136 páginasBella Rose, Leona Lee - Propiedad de Un Capo de La Mafia Rusavioleta_jiménez_282% (17)
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Guia Asma Pediatria 20 08 019 Web PDFDocumento132 páginasGuia Asma Pediatria 20 08 019 Web PDFGenesis PerezAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- MoldeamientoDocumento12 páginasMoldeamientoAniuska Infante MambelAún no hay calificaciones
- Ai10 Tarea1Documento6 páginasAi10 Tarea1Jueguitos Mundo100% (1)
- Criptonomicon I - El Código EnigmaDocumento280 páginasCriptonomicon I - El Código EnigmaClaudio Cotar100% (2)
- Wrong Question, Right Answer (The Bourbon Street Boys 3) - Elle CaseyDocumento306 páginasWrong Question, Right Answer (The Bourbon Street Boys 3) - Elle CaseyAlejandra Menéndez50% (2)
- 5 Plan de Clase DemostrativaDocumento2 páginas5 Plan de Clase DemostrativaNacho Phie70% (10)
- Trabajo Final de Historia Global, La Basura en PanamáDocumento17 páginasTrabajo Final de Historia Global, La Basura en PanamáKevin Adames (4you)100% (1)
- Electronica y MicrocontroladoresDocumento20 páginasElectronica y Microcontroladorescastillo25086% (7)
- Práctica 3 - AjedrezDocumento44 páginasPráctica 3 - Ajedrezvioleta_jiménez_260% (15)
- No Está en Los Genes - R.C. LewontinDocumento391 páginasNo Está en Los Genes - R.C. LewontinGus Ramos100% (1)
- Unidad 5Documento10 páginasUnidad 5Luis Alonso Ruiz LopezAún no hay calificaciones
- Informe PracticA 4Documento20 páginasInforme PracticA 4Darío OrdóñezAún no hay calificaciones
- Reporte de Examen VII - Inversor de Giro de Un Motor TrifásicoDocumento30 páginasReporte de Examen VII - Inversor de Giro de Un Motor TrifásicoOscar Manuel Quiroz De La Vega50% (2)
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento12 páginasPuertos y Buses de Comunicación para MicrocontroladoresAngelita Vargas PerezAún no hay calificaciones
- Uni 06 Chipol Sinaca JoselynDocumento18 páginasUni 06 Chipol Sinaca JoselynJOSELYN CHIPOL SINACAAún no hay calificaciones
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento5 páginasPuertos y Buses de Comunicación para MicrocontroladoresAngeles Reyes CamposAún no hay calificaciones
- SistemasProgramables Unidad-5 CompletaDocumento9 páginasSistemasProgramables Unidad-5 CompletaLuis Alejandro Escárcega FernándezAún no hay calificaciones
- Ensayo Kevin ValenzuelaDocumento32 páginasEnsayo Kevin Valenzuelakevin valenzuelaAún no hay calificaciones
- Puertos y Buses de Comunicacion para MicrocontroladoresDocumento8 páginasPuertos y Buses de Comunicacion para MicrocontroladoresSama Medina RosesAún no hay calificaciones
- Tarea 6.1.francisco Elio Cerino de La CruzDocumento18 páginasTarea 6.1.francisco Elio Cerino de La CruzFranciscoAún no hay calificaciones
- Introducción Sistemas ProgramablesDocumento3 páginasIntroducción Sistemas ProgramablesFaustino David Diaz PechAún no hay calificaciones
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento5 páginasPuertos y Buses de Comunicación para MicrocontroladoresNestor Vargas100% (5)
- A5.1 Reporte de Investigación SP JADSDocumento9 páginasA5.1 Reporte de Investigación SP JADSJose Alberto Delfin SosaAún no hay calificaciones
- Práctica 3 Sensor UltrasónicoDocumento17 páginasPráctica 3 Sensor UltrasónicoRobertoWhiteBlackAún no hay calificaciones
- Microcontroladores 1Documento48 páginasMicrocontroladores 1Gastón ValenzuelaAún no hay calificaciones
- p1 NuevoDocumento35 páginasp1 NuevoAlex MecaAún no hay calificaciones
- MicroprocesadoresDocumento2 páginasMicroprocesadoresFernanda LeonAún no hay calificaciones
- Capitulo 2Documento12 páginasCapitulo 2Misael HernándezAún no hay calificaciones
- Qué Es Un PLCDocumento9 páginasQué Es Un PLCCarlos Montalvo MarinAún no hay calificaciones
- Cuestionario SoftwareDocumento7 páginasCuestionario SoftwareSteven AguirreAún no hay calificaciones
- Informe Final Del Laboratorio 5Documento6 páginasInforme Final Del Laboratorio 5Ademir IldefonsoAún no hay calificaciones
- Informe PLCDocumento9 páginasInforme PLCJuan Hernandez MellizoAún no hay calificaciones
- Monografia de ArduinoDocumento19 páginasMonografia de ArduinoGustavo Leyva Espezúa100% (1)
- Protocolos de Comunicaciones IndustrialesDocumento7 páginasProtocolos de Comunicaciones IndustrialesPaul Cevallos100% (1)
- Unidad IDocumento10 páginasUnidad IJose Manuel Godoy EscribarAún no hay calificaciones
- Instituto Tecnológico Superior de San Andrés TuxtlaDocumento7 páginasInstituto Tecnológico Superior de San Andrés TuxtlaPedro Daniel Rosas FajardoAún no hay calificaciones
- Comunicación SerialDocumento52 páginasComunicación SerialLebni Zaabdi Lopez MelchorAún no hay calificaciones
- 1 - Tutorial UART WFDocumento55 páginas1 - Tutorial UART WFIván AGAún no hay calificaciones
- Resumen 1Documento6 páginasResumen 1Santiago CarreraAún no hay calificaciones
- Sesion 03 - Arquitectura de ComputadorasDocumento31 páginasSesion 03 - Arquitectura de ComputadorassullonseminariojonathanAún no hay calificaciones
- Puertos y Conectores de Un PCDocumento24 páginasPuertos y Conectores de Un PCFabio Valencia L.100% (3)
- OmarDocumento8 páginasOmarOmar Navia CondoriAún no hay calificaciones
- Reporte 9 PDFDocumento3 páginasReporte 9 PDFivan lopezAún no hay calificaciones
- PuertosDocumento4 páginasPuertosCiry2014Aún no hay calificaciones
- PuertosDocumento12 páginasPuertosMando SerratoAún no hay calificaciones
- Definición de MicrocontroladorDocumento4 páginasDefinición de Microcontroladorsamuel MoralesAún no hay calificaciones
- Exposición PuertosDocumento18 páginasExposición PuertosElmer Hdez TorresAún no hay calificaciones
- 003 Introducción A Los Controladores IndustrialesDocumento42 páginas003 Introducción A Los Controladores Industrialesecorisa10Aún no hay calificaciones
- Puerto Serie y ParaleloDocumento8 páginasPuerto Serie y ParaleloFloresFernando0% (1)
- ArduinoDocumento7 páginasArduinoCatherinee MooraAún no hay calificaciones
- Practica 3Documento29 páginasPractica 3JulioAún no hay calificaciones
- Acelerómetro Microcontrolador ATMELDocumento19 páginasAcelerómetro Microcontrolador ATMELCarlos Edgar Buitron QuispeAún no hay calificaciones
- Microcol XDDocumento13 páginasMicrocol XDMoonse SanchezAún no hay calificaciones
- Laboratorio 4 Comunicacion UartDocumento9 páginasLaboratorio 4 Comunicacion UartRonaldo Chura FloresAún no hay calificaciones
- Adquisicion y Transmisión de Datos A Una Planilla Excel 2020Documento22 páginasAdquisicion y Transmisión de Datos A Una Planilla Excel 2020Rafael MendozaAún no hay calificaciones
- PLC 2 EfDocumento17 páginasPLC 2 EfnegyAún no hay calificaciones
- Tutorial para Dummies PICDocumento173 páginasTutorial para Dummies PICPruebas MessAún no hay calificaciones
- Arquitectura Del PLCDocumento25 páginasArquitectura Del PLCJORGE ENRIQUE GUTIERREZ ROLDANAún no hay calificaciones
- Unidad 6 Soluciones Con Ethernet1Documento17 páginasUnidad 6 Soluciones Con Ethernet1gusAún no hay calificaciones
- Vdocuments - MX Operacion de Micros e InterfacesDocumento29 páginasVdocuments - MX Operacion de Micros e Interfacesmario floresAún no hay calificaciones
- PLC UtnDocumento56 páginasPLC UtnBarbyModestiAún no hay calificaciones
- Presentacion PLCsDocumento35 páginasPresentacion PLCsCésar Armando PulidoAún no hay calificaciones
- Manual de Practicas de PLC y HMI Con Ejemplos y ProgramasDocumento16 páginasManual de Practicas de PLC y HMI Con Ejemplos y ProgramasjoseAún no hay calificaciones
- Practica de Unidad UartDocumento53 páginasPractica de Unidad UartLizzy GómezAún no hay calificaciones
- Subsistema de Entrada SalidaDocumento9 páginasSubsistema de Entrada SalidaFernando XadrizesAún no hay calificaciones
- DISPOSITIVOS IO InvestigacionDocumento16 páginasDISPOSITIVOS IO Investigacionangels2850Aún no hay calificaciones
- Excel - Macro para Abrir Una Carpeta EspecificaDocumento2 páginasExcel - Macro para Abrir Una Carpeta Especificavioleta_jiménez_2Aún no hay calificaciones
- 4 - Lenguajes y AutomatasDocumento15 páginas4 - Lenguajes y Automatasvioleta_jiménez_2Aún no hay calificaciones
- Manual de Prácticas Labview - López Jiménez VioletaDocumento30 páginasManual de Prácticas Labview - López Jiménez Violetavioleta_jiménez_2Aún no hay calificaciones
- Reporte Del Examen en Equipo - 3Documento7 páginasReporte Del Examen en Equipo - 3violeta_jiménez_2Aún no hay calificaciones
- Pruebas Eléctricas para Puesta en Marcha y Manteniemiento de TransformadoresDocumento16 páginasPruebas Eléctricas para Puesta en Marcha y Manteniemiento de Transformadoresvioleta_jiménez_2Aún no hay calificaciones
- Práctica Con ServomotorDocumento11 páginasPráctica Con Servomotorvioleta_jiménez_2Aún no hay calificaciones
- 6.1 Tipos y Propiedades de Polímeros de IngenieríaDocumento40 páginas6.1 Tipos y Propiedades de Polímeros de Ingenieríavioleta_jiménez_2Aún no hay calificaciones
- Preparacion de Arroz Con Coco - Soraya SierraDocumento11 páginasPreparacion de Arroz Con Coco - Soraya SierraJose Evelio Cardona GonzalezAún no hay calificaciones
- El Derecho de AprenderDocumento8 páginasEl Derecho de AprenderLupiz Zalinaz100% (1)
- Hilos Conductores de La Empresa ArgosDocumento4 páginasHilos Conductores de La Empresa ArgosVanessita Gomez CruzAún no hay calificaciones
- Pelicula 23 04Documento5 páginasPelicula 23 04marlonAún no hay calificaciones
- Infraestructura CriticaDocumento3 páginasInfraestructura CriticaJose Miguel Iriarte NeiraAún no hay calificaciones
- ACTIVIDAD COMPLEMENTARIA No. 2 DE ADMINISTRACION FINANCIERADocumento14 páginasACTIVIDAD COMPLEMENTARIA No. 2 DE ADMINISTRACION FINANCIERAMartha Lucia Tovar100% (1)
- Cadena de Suministro CocaDocumento1 páginaCadena de Suministro CocaAntonio Rodriguez MachadoAún no hay calificaciones
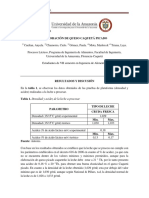
- Grupo 6-Queso Caquetá PicadoDocumento5 páginasGrupo 6-Queso Caquetá PicadoMarlon Stiven Motta ManriqueAún no hay calificaciones
- Rúbrica de EvaluaciónDocumento2 páginasRúbrica de EvaluaciónelbartoAún no hay calificaciones
- Cuadreno Abastecimiento Parte 1 (Ed)Documento95 páginasCuadreno Abastecimiento Parte 1 (Ed)イエスサンダーAún no hay calificaciones
- Tema 23Documento11 páginasTema 23calosjavierAún no hay calificaciones
- Caracteristicas y Tipos de AmbulanciasDocumento4 páginasCaracteristicas y Tipos de Ambulanciasnexprem121046Aún no hay calificaciones
- Teoría Del DecrecimientoDocumento5 páginasTeoría Del DecrecimientoKaren Dayanna Mesa ParraAún no hay calificaciones
- El Problema Del Crunch en La Industria Del Videojuego Y Que Medidas Se Pueden Tomar para EvitarloDocumento20 páginasEl Problema Del Crunch en La Industria Del Videojuego Y Que Medidas Se Pueden Tomar para EvitarloPedro GutierrezAún no hay calificaciones
- Cuestionario SenaDocumento5 páginasCuestionario SenaYenyfer VirguezAún no hay calificaciones
- Qué Es Chavín de HuántarDocumento10 páginasQué Es Chavín de HuántarMj RodrigoAún no hay calificaciones
- Educación en Emergencias Familiares y Comunitarias. UniminutoDocumento12 páginasEducación en Emergencias Familiares y Comunitarias. UniminutoEduardo RamirezAún no hay calificaciones
- RM - 029 2021 ViviendaDocumento28 páginasRM - 029 2021 ViviendaPierre SalasAún no hay calificaciones
- Taller 4Documento4 páginasTaller 4EIEEAún no hay calificaciones
- Depresión Postparto, Aspectos Clinicos PDFDocumento11 páginasDepresión Postparto, Aspectos Clinicos PDFYanin SantoyaAún no hay calificaciones
- Informe de Inventario de Pozos Subterranesos - Aaa MantaroDocumento44 páginasInforme de Inventario de Pozos Subterranesos - Aaa MantaroCarlos OscanoaAún no hay calificaciones
- 2019CV Maria Fernanda2019Documento7 páginas2019CV Maria Fernanda2019Franz Laura BerriosAún no hay calificaciones
- JOSE TOCTO PUELLES PREVIENE A LA ADMINISTRACI+ôN MUNICIPAL.Documento4 páginasJOSE TOCTO PUELLES PREVIENE A LA ADMINISTRACI+ôN MUNICIPAL.LUIS ANTONIO LLATANCE MENDOZAAún no hay calificaciones