También podría gustarte
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento3 páginasPuertos y Buses de Comunicación para MicrocontroladoresJOSE ALFREDO AMARO OLAYAAún no hay calificaciones
- Exp - 5.1 - 5.2 - 5.3 - SISTEMAS PROGRAMABLESDocumento9 páginasExp - 5.1 - 5.2 - 5.3 - SISTEMAS PROGRAMABLESPris ChucAún no hay calificaciones
- Generacion de Codigo ObjetoDocumento13 páginasGeneracion de Codigo ObjetoLuis Antonio RFAún no hay calificaciones
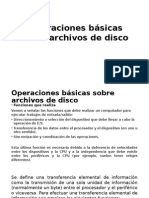
- 2.16 Operaciones Básicas Sobre Archivos de DiscoDocumento5 páginas2.16 Operaciones Básicas Sobre Archivos de DiscoFrank Diaz33% (3)
- Investiga Los Modos de Operación y Archivos Log de Un SGBDDocumento4 páginasInvestiga Los Modos de Operación y Archivos Log de Un SGBDJorge Marin0% (1)
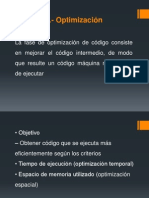
- Optimización de CodigoDocumento14 páginasOptimización de CodigoAxel HernandezAún no hay calificaciones
- Unidad Iii OptimizaciónDocumento17 páginasUnidad Iii OptimizaciónMosh Drummer100% (1)
- Lenguajes y Automatas II - Unidad 4Documento8 páginasLenguajes y Automatas II - Unidad 4Carlos Cruz67% (3)
- Unidad 1 - Lenguajes de InterfazDocumento32 páginasUnidad 1 - Lenguajes de InterfazHanszLóppeszAún no hay calificaciones
- UNIDAD 2-Subtemas 2.6, 2.7, 2.9 y 2.10 Lenguajes de InterfazDocumento9 páginasUNIDAD 2-Subtemas 2.6, 2.7, 2.9 y 2.10 Lenguajes de Interfazluis angel roman valdovinosAún no hay calificaciones
- 5.3 Creacion de Tablas TokenDocumento6 páginas5.3 Creacion de Tablas TokenJack Patrick Gonzalez100% (1)
- Codigo PDocumento12 páginasCodigo PanthonyAún no hay calificaciones
- Generación de Matriz PredictivaDocumento6 páginasGeneración de Matriz PredictivaNikiJerry0% (1)
- Criterios para La Optimizacion de CodigoDocumento18 páginasCriterios para La Optimizacion de CodigoAleBachoAún no hay calificaciones
- Chipset y Aplicaciones y Ambientes de ServicioDocumento71 páginasChipset y Aplicaciones y Ambientes de ServicioDaniel Joestar83% (6)
- Captura Basicas de CadenasDocumento2 páginasCaptura Basicas de CadenasSaul EspinozaAún no hay calificaciones
- 4.2 Registros CpuDocumento5 páginas4.2 Registros CpuRicardo Ozuna BedollaAún no hay calificaciones
- 2.3 Aplicacion en Problemas RealesDocumento5 páginas2.3 Aplicacion en Problemas RealesDaniel Aguilar BalboaAún no hay calificaciones
- 2.3 Esquemas de GeneracionDocumento22 páginas2.3 Esquemas de GeneracionYessicaAlvarez50% (4)
- Investigación - Enlaces Públicos y PrivadosDocumento2 páginasInvestigación - Enlaces Públicos y PrivadosLuiz Alcantara100% (1)
- 1.1 Revisión de Especificación de Requisitos.Documento19 páginas1.1 Revisión de Especificación de Requisitos.sandraAún no hay calificaciones
- Unidad 4 Generación de Código ObjetoDocumento13 páginasUnidad 4 Generación de Código ObjetoMiriamAlvarez100% (2)
- Análisis de Los Manejadores de Bases de DatosDocumento4 páginasAnálisis de Los Manejadores de Bases de DatosAna Karen SotoAún no hay calificaciones
- Manejo de Bus y Aplicacion de Buses PDFDocumento4 páginasManejo de Bus y Aplicacion de Buses PDFDavid Montiel Ramirez0% (1)
- 1.5 Esquema de TraducciónDocumento3 páginas1.5 Esquema de Traducciónu25linAún no hay calificaciones
- Investigación Disciplina de TiposDocumento6 páginasInvestigación Disciplina de TiposAlex Cruz100% (2)
- Lenguajes y Automatas 2 - OptimizaciónDocumento35 páginasLenguajes y Automatas 2 - OptimizaciónTiUmbra80% (5)
- Esquemas de GeneracionDocumento3 páginasEsquemas de Generacionjorge50% (2)
- Arquitectura de Computadoras 1.2.2 MemoriaDocumento2 páginasArquitectura de Computadoras 1.2.2 MemoriaMarshall Mt100% (1)
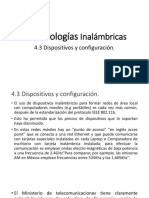
- Tecnologías: 4. InalámbricasDocumento6 páginasTecnologías: 4. Inalámbricaschocky22Aún no hay calificaciones
- Modelos de Programacion de MicrocontroladoresDocumento4 páginasModelos de Programacion de MicrocontroladoresMigue Flores100% (2)
- Unidad 3 Sistemas Operativos de Software Libre para ServidoresDocumento13 páginasUnidad 3 Sistemas Operativos de Software Libre para ServidoresAlbertoAún no hay calificaciones
- Unidad 5 Computo en La NubeDocumento4 páginasUnidad 5 Computo en La NubeMarlen Guadalupe Vargas VictorinoAún no hay calificaciones
- Dispositivos de Capa SuperiorDocumento14 páginasDispositivos de Capa SuperiorPepe Angel0% (2)
- Configuracion de Dispositivos WANDocumento8 páginasConfiguracion de Dispositivos WANElías Edmund Guz SolanoAún no hay calificaciones
- Diferencia Entre Un Traductor y Un Compilador PDFDocumento6 páginasDiferencia Entre Un Traductor y Un Compilador PDFBenjamin Viramontes JuarezAún no hay calificaciones
- Herramientas para El Análisis Del Flujo de DatosDocumento2 páginasHerramientas para El Análisis Del Flujo de DatosRaul Galindo100% (1)
- Lenguajes y Autómatas II - OptimizaciónDocumento5 páginasLenguajes y Autómatas II - OptimizaciónWilliam RiversAún no hay calificaciones
- 3.1 Lenguajes para El Desarrollo de SoftwareDocumento8 páginas3.1 Lenguajes para El Desarrollo de SoftwareAlex VillaAún no hay calificaciones
- 5.1 Ensayo de La Unidad 5Documento14 páginas5.1 Ensayo de La Unidad 5Osmar CoBe100% (1)
- ModularizaciónDocumento14 páginasModularizacióndavidmr905Aún no hay calificaciones
- Uso de Graficas 2d y 3dDocumento9 páginasUso de Graficas 2d y 3dDiego NavaAún no hay calificaciones
- Lenguajes y Autómatas Unidad 3 Competencias. OptimizaciónDocumento34 páginasLenguajes y Autómatas Unidad 3 Competencias. OptimizaciónNaliw100% (2)
- AutomatasDocumento28 páginasAutomatasMharcelha Noyola MerinoAún no hay calificaciones
- Arquitectura de Los Microprocesadores Intel y CompatiblesDocumento9 páginasArquitectura de Los Microprocesadores Intel y CompatiblesDiego Martinez100% (1)
- 5.4 Estandares de BusesDocumento12 páginas5.4 Estandares de BusesPedro Alfonso Granados GarciaAún no hay calificaciones
- 1.5 Esquemas de TraducciónDocumento13 páginas1.5 Esquemas de TraducciónJose Muñiz0% (2)
- Cuadro Comparativo (Programación Móvil Vs Programación TradicionalDocumento3 páginasCuadro Comparativo (Programación Móvil Vs Programación TradicionalLuis Canul25% (8)
- 4.2 Componentes y Herramientas de Instalación.Documento14 páginas4.2 Componentes y Herramientas de Instalación.TheBodkinsAún no hay calificaciones
- Resumen de Los Subtemas Unidad 3 Control de AccesoDocumento14 páginasResumen de Los Subtemas Unidad 3 Control de AccesoJonathan LopezAún no hay calificaciones
- 4.1 Modelos de ProgramaciónDocumento32 páginas4.1 Modelos de ProgramaciónBetty_jade0% (1)
- 2.4 Instalacion de SGBD de Forma TransaccionalDocumento12 páginas2.4 Instalacion de SGBD de Forma Transaccionaljames hardenAún no hay calificaciones
- Modelos de Programación de MicrocontroladoresDocumento4 páginasModelos de Programación de MicrocontroladoresKarmen Olguin100% (3)
- 1.3 Lenguajes, Tipos y HerramientasDocumento6 páginas1.3 Lenguajes, Tipos y HerramientasShaaron Porras RangelAún no hay calificaciones
- Unidad 3. Modularización PDFDocumento4 páginasUnidad 3. Modularización PDFVictor Alfonso MontalvoAún no hay calificaciones
- Cuadro Comparativo: Modelo OSI Vs Protocolo TCP/IPDocumento2 páginasCuadro Comparativo: Modelo OSI Vs Protocolo TCP/IPEricx TorresAún no hay calificaciones
- Actividad 5 - Unidad 5 Redes de ComputadorasDocumento7 páginasActividad 5 - Unidad 5 Redes de Computadorasjuan pablo0% (1)
- Unidad 6 Sistemas ProgramablesDocumento16 páginasUnidad 6 Sistemas ProgramablesAaron Arguelles100% (1)
- Puertos y Buses de Comunicacion para MicrocontroladoresDocumento8 páginasPuertos y Buses de Comunicacion para MicrocontroladoresSama Medina RosesAún no hay calificaciones
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento5 páginasPuertos y Buses de Comunicación para MicrocontroladoresNestor Vargas100% (5)
- Unidad 2Documento13 páginasUnidad 2Angeles Reyes CamposAún no hay calificaciones
- Aplicaciones Con Técnicas de IADocumento6 páginasAplicaciones Con Técnicas de IAAngeles Reyes CamposAún no hay calificaciones
- Funcionamiento Del Ratón ÓpticoDocumento1 páginaFuncionamiento Del Ratón ÓpticoAngeles Reyes CamposAún no hay calificaciones
- Actuadores en La Vida CotidianaDocumento1 páginaActuadores en La Vida CotidianaAngeles Reyes CamposAún no hay calificaciones
- Actuadores en La Vida CotidianaDocumento1 páginaActuadores en La Vida CotidianaAngeles Reyes CamposAún no hay calificaciones
- Registros de Uso GeneralDocumento1 páginaRegistros de Uso GeneralAngeles Reyes CamposAún no hay calificaciones
- Conjunto de Instrucciones ISADocumento1 páginaConjunto de Instrucciones ISAAngeles Reyes CamposAún no hay calificaciones
- Evidencia 1 Foro Sistemas de InformaciónDocumento3 páginasEvidencia 1 Foro Sistemas de Informaciónca muAún no hay calificaciones
- KjhujDocumento7 páginasKjhujGloria Patricia QuirogaAún no hay calificaciones
- Culqi OnlineDocumento47 páginasCulqi Onlineasesores.forza1Aún no hay calificaciones
- S1 Lenguaje Unificado de ModeladoDocumento3 páginasS1 Lenguaje Unificado de ModeladoAlfredo GuarnerosAún no hay calificaciones
- DAM BD05 PDFContenidosDocumento46 páginasDAM BD05 PDFContenidosDavid C. DiazAún no hay calificaciones
- I. Organización de ComputadoresDocumento2 páginasI. Organización de Computadorestatiana ramirez cassianisAún no hay calificaciones
- Microsoft 365Documento31 páginasMicrosoft 365MisaelRosAún no hay calificaciones
- Curso Parte 4Documento43 páginasCurso Parte 4lanuseAún no hay calificaciones
- Preparación RedesDocumento6 páginasPreparación RedesBryan Estuardo MacarioAún no hay calificaciones
- Pentaho Data IntegrationDocumento19 páginasPentaho Data IntegrationOscar Alejandro Tincopa UrbinaAún no hay calificaciones
- Infografía Dispositivos de AlmacenamientoDocumento1 páginaInfografía Dispositivos de AlmacenamientoKAREN DANIELA SANCHEZ GARCIAAún no hay calificaciones
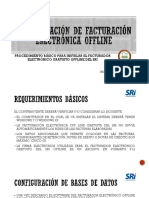
- 27.3.1 Configuracion Facturador Gratuito SriDocumento12 páginas27.3.1 Configuracion Facturador Gratuito SriFacturacion kutakachiAún no hay calificaciones
- P.tarea de Base de DatosDocumento2 páginasP.tarea de Base de DatoskjoAún no hay calificaciones
- Iso8583 ResumenDocumento9 páginasIso8583 Resumendamahoj412Aún no hay calificaciones
- CV 01 10 2022 ComputrabajoDocumento2 páginasCV 01 10 2022 ComputrabajoNeitan WoralesAún no hay calificaciones
- 1 Uso de Wireshark para Observar El Protocolo de Enlace de Tres Vías Del TCPDocumento8 páginas1 Uso de Wireshark para Observar El Protocolo de Enlace de Tres Vías Del TCPCamila CHACON SANCHEZAún no hay calificaciones
- AWS Cloud Practitioner - Practice Questions 1Documento100 páginasAWS Cloud Practitioner - Practice Questions 1eduardo quezadaAún no hay calificaciones
- Cómo Funciona La Memoria de Una ComputadoraDocumento28 páginasCómo Funciona La Memoria de Una ComputadoraAmaliaArroyoAún no hay calificaciones
- La Norma 508Documento2 páginasLa Norma 508fallenmind004Aún no hay calificaciones
- Proyecto Sia Diagrama de Contexto y Diagrama de DatosDocumento9 páginasProyecto Sia Diagrama de Contexto y Diagrama de Datosfelipe andresAún no hay calificaciones
- Tarea 7 de Tecnologia 1Documento4 páginasTarea 7 de Tecnologia 1Yamilka Rafaela Mercado GómezAún no hay calificaciones
- Actividad 16Documento9 páginasActividad 16Pao SilviAún no hay calificaciones
- Unidad5 - Actividad1 - Almacenamiento de DatosDocumento3 páginasUnidad5 - Actividad1 - Almacenamiento de DatosJhensy Sandoval Moran100% (1)
- Informe de Requerimientos 3 - SenaDocumento5 páginasInforme de Requerimientos 3 - SenaLuz Eliana Martinez RamosAún no hay calificaciones
- Curriculo Empresarial InblayDocumento6 páginasCurriculo Empresarial InblayInblay TechnologyAún no hay calificaciones
- Memorias (Ram, Rom y Cache) PDFDocumento10 páginasMemorias (Ram, Rom y Cache) PDFJulio SantiagoAún no hay calificaciones
- Confirmación Del Pedido y Factura Del CompradorDocumento1 páginaConfirmación Del Pedido y Factura Del CompradorMarcos junior Panta juarezAún no hay calificaciones
- Todos Tenemos Un Niño Interior - ResueltoDocumento7 páginasTodos Tenemos Un Niño Interior - ResueltoSierraAún no hay calificaciones
- Trabajo ColaborativoDocumento4 páginasTrabajo ColaborativoTenis UnisonAún no hay calificaciones
- Manual para La Implemnetación de MinitoolDocumento6 páginasManual para La Implemnetación de MinitooljorgedocumentacionAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasDe EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoDe EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoCalificación: 3.5 de 5 estrellas3.5/5 (6)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- GuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaDe EverandGuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaAún no hay calificaciones
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Guía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackDe EverandGuía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackAún no hay calificaciones
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- Scrum Las Estrategias del Juego: Es Póker, No AjedrezDe EverandScrum Las Estrategias del Juego: Es Póker, No AjedrezCalificación: 5 de 5 estrellas5/5 (1)
- Cómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialDe EverandCómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialCalificación: 4.5 de 5 estrellas4.5/5 (34)
- Ciberseguridad: ¿Por qué es importante para todos?De EverandCiberseguridad: ¿Por qué es importante para todos?Aún no hay calificaciones