También podría gustarte
- Programación de Puertos de La ComputadoraDocumento17 páginasProgramación de Puertos de La ComputadoraEduardo Mateo Navarrete67% (3)
- 04-Computador, Elementos, PerifericosDocumento37 páginas04-Computador, Elementos, PerifericosYennifer CamposAún no hay calificaciones
- Programación de Puertos de La ComputadoraDocumento10 páginasProgramación de Puertos de La ComputadoraMario Kevin100% (1)
- 6ta ActividadDocumento4 páginas6ta ActividadLolha Loplus LsAún no hay calificaciones
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento5 páginasPuertos y Buses de Comunicación para MicrocontroladoresAngeles Reyes CamposAún no hay calificaciones
- Los Puertos LógicosDocumento2 páginasLos Puertos LógicosCesar Gonzalez CAún no hay calificaciones
- WWW - Uv.es Varnau AEC 01Documento31 páginasWWW - Uv.es Varnau AEC 01Oscar Rolando Perez GarciaAún no hay calificaciones
- Caracteristicas de Operaciones de Puertos EstandarDocumento24 páginasCaracteristicas de Operaciones de Puertos EstandarCecilia Leon Mateos100% (2)
- Trabajo de OCDocumento8 páginasTrabajo de OCaaaaaaaAún no hay calificaciones
- Exposición PuertosDocumento18 páginasExposición PuertosElmer Hdez TorresAún no hay calificaciones
- Unidad 2 Manejo de PuertosDocumento5 páginasUnidad 2 Manejo de Puertosantonio parraAún no hay calificaciones
- Puertos y Buses de Comunicacion para MicrocontroladoresDocumento8 páginasPuertos y Buses de Comunicacion para MicrocontroladoresSama Medina RosesAún no hay calificaciones
- Identificar El Uso de Actualmente Los Tres Tipos de Puertos Ejemplo y ImágenesDocumento30 páginasIdentificar El Uso de Actualmente Los Tres Tipos de Puertos Ejemplo y ImágenescarlaAún no hay calificaciones
- InterfacesDocumento30 páginasInterfacesNathaly CoreaAún no hay calificaciones
- Puerto serie: interfaz de comunicación en serieDocumento8 páginasPuerto serie: interfaz de comunicación en serieFloresFernando0% (1)
- DISPOSITIVOS IO InvestigacionDocumento16 páginasDISPOSITIVOS IO Investigacionangels2850Aún no hay calificaciones
- Presentación Puerto SerieDocumento24 páginasPresentación Puerto SerieluropatAún no hay calificaciones
- Puertos de ComunicaciónDocumento10 páginasPuertos de ComunicaciónOsvaldo AmadorAún no hay calificaciones
- Manejo de Puertos de PCDocumento11 páginasManejo de Puertos de PCAbel JmcAún no hay calificaciones
- PERIFERICOSDocumento31 páginasPERIFERICOSSandra ValenciaAún no hay calificaciones
- El Harware de Un Sistema MultiusuarioDocumento6 páginasEl Harware de Un Sistema MultiusuarioFabricio Caicedo0% (1)
- Puertos y Buses de Comunicación para MicrocontroladoresDocumento5 páginasPuertos y Buses de Comunicación para MicrocontroladoresNestor Vargas100% (5)
- Introducción Sistemas ProgramablesDocumento3 páginasIntroducción Sistemas ProgramablesFaustino David Diaz PechAún no hay calificaciones
- Reporte Puertos Serial, Paralelo y USBDocumento12 páginasReporte Puertos Serial, Paralelo y USBGustavoAún no hay calificaciones
- Tema 3 - JMUADocumento8 páginasTema 3 - JMUAJuan Manuel UgaldeAún no hay calificaciones
- Informe RS 232 RecuperacionDocumento11 páginasInforme RS 232 RecuperacionJuanSe Vasquez CrissAún no hay calificaciones
- Album de Arquitectura de Un ComputadorDocumento31 páginasAlbum de Arquitectura de Un ComputadorPaola RamirezAún no hay calificaciones
- Tarea 2.1 Investigacion DocumentalDocumento10 páginasTarea 2.1 Investigacion DocumentalAarón CuevasAún no hay calificaciones
- Álbum de Arquitectura-Mauricio Murillo.Documento22 páginasÁlbum de Arquitectura-Mauricio Murillo.Mauricio Murillo QuinteroAún no hay calificaciones
- 3 DescripcionDocumento8 páginas3 DescripcionAnonymous 1a41w9kKQEAún no hay calificaciones
- FASE 1 - Sistemas de Adquisicion y Acondicionamiento de Señales Aporte 1Documento19 páginasFASE 1 - Sistemas de Adquisicion y Acondicionamiento de Señales Aporte 1Carlos Rodriguez100% (2)
- Identificando Los Periféricos No EstandarizadosDocumento7 páginasIdentificando Los Periféricos No EstandarizadosIng. Edgardo Yocupicio RuizAún no hay calificaciones
- Dispositivos de Entrada-SALIDADocumento3 páginasDispositivos de Entrada-SALIDAKEVIN MICHAEL RAMON CARBOAún no hay calificaciones
- Unidad 1 - Introduccion A La PCDocumento23 páginasUnidad 1 - Introduccion A La PCMaria Estela MaizonAún no hay calificaciones
- Reporte Perifericos No EstandarizadosDocumento10 páginasReporte Perifericos No EstandarizadosHairo Bautista CastroAún no hay calificaciones
- Act 1.3 Puertos Serial y ParaleloDocumento10 páginasAct 1.3 Puertos Serial y ParaleloAseret OznolaAún no hay calificaciones
- Tecnologías e Interfaces de ComputadorasDocumento32 páginasTecnologías e Interfaces de Computadoraskevin valenzuelaAún no hay calificaciones
- Puerto SerieDocumento7 páginasPuerto Seriecuentas y mas cuentasAún no hay calificaciones
- SistemasProgramables Unidad-5 CompletaDocumento9 páginasSistemasProgramables Unidad-5 CompletaLuis Alejandro Escárcega FernándezAún no hay calificaciones
- TP2 Practica Profesional Analisis de Sistemas EthernetDocumento22 páginasTP2 Practica Profesional Analisis de Sistemas EthernetCODE0303456Aún no hay calificaciones
- Putadoras Investigacion Comp3Documento5 páginasPutadoras Investigacion Comp3Vrayan AlejandroAún no hay calificaciones
- PuertosDocumento6 páginasPuertostjacmmbmAún no hay calificaciones
- Reporte 9 JDAS 1842579Documento5 páginasReporte 9 JDAS 1842579Serna ReynaAún no hay calificaciones
- Unidad 6 BusesDocumento23 páginasUnidad 6 BusesKaren HernandezAún no hay calificaciones
- Subsistema de Entrada SalidaDocumento9 páginasSubsistema de Entrada SalidaFernando XadrizesAún no hay calificaciones
- Diagnóstico PC AIDA32Documento26 páginasDiagnóstico PC AIDA32eduardoymaricelAún no hay calificaciones
- Clasificacion de Interfaces en MadDocumento12 páginasClasificacion de Interfaces en MadJorge López GómezAún no hay calificaciones
- Profibus DP y PADocumento13 páginasProfibus DP y PAAracelly RoMeroAún no hay calificaciones
- Trabajo Practico de InformaticaDocumento22 páginasTrabajo Practico de InformaticaGiuliana VargasAún no hay calificaciones
- Redes Industriales IDocumento120 páginasRedes Industriales IIvanov H Rojas GutierrezAún no hay calificaciones
- Unidad 5Documento10 páginasUnidad 5Luis Alonso Ruiz LopezAún no hay calificaciones
- Periféricos: dispositivos clave para la computadoraDocumento7 páginasPeriféricos: dispositivos clave para la computadorakaren julianaAún no hay calificaciones
- Sistema SCADA con InTouch y PLC TWIDO para control de variadores de frecuenciaDocumento20 páginasSistema SCADA con InTouch y PLC TWIDO para control de variadores de frecuenciaDarío OrdóñezAún no hay calificaciones
- Periféricos Entrada/SalidaDocumento12 páginasPeriféricos Entrada/SalidaRytherumzAún no hay calificaciones
- Interfaces de Comunicacion PCI, Ansi y USBDocumento4 páginasInterfaces de Comunicacion PCI, Ansi y USBBeckyBethAún no hay calificaciones
- Tema 4.1 y 4.2 InterfacesDocumento12 páginasTema 4.1 y 4.2 InterfacescesarhoAún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Fundamentos de Redes InformáticasDe EverandFundamentos de Redes InformáticasCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Fundamentos de Redes Informáticas - 2ª EdiciónDe EverandFundamentos de Redes Informáticas - 2ª EdiciónCalificación: 3 de 5 estrellas3/5 (2)
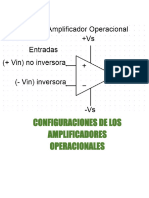
- Configuraciones de Los Amplificadores Operacionales-Joselyn Chipol SinacaDocumento7 páginasConfiguraciones de Los Amplificadores Operacionales-Joselyn Chipol SinacaJOSELYN CHIPOL SINACAAún no hay calificaciones
- Excel 15 y 17Documento10 páginasExcel 15 y 17JOSELYN CHIPOL SINACAAún no hay calificaciones
- Lista 1 eDocumento2 páginasLista 1 eJOSELYN CHIPOL SINACAAún no hay calificaciones
- Guía de Observación de ExposiciónDocumento2 páginasGuía de Observación de ExposiciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- ,. Bn.Documento1 página,. Bn.JOSELYN CHIPOL SINACAAún no hay calificaciones
- Campaña Contra El Uso de Vapeadores - 05,15, 33, 34 y 37Documento3 páginasCampaña Contra El Uso de Vapeadores - 05,15, 33, 34 y 37JOSELYN CHIPOL SINACAAún no hay calificaciones
- NandoDocumento2 páginasNandoJOSELYN CHIPOL SINACAAún no hay calificaciones
- Edna O'BrienDocumento1 páginaEdna O'BrienJOSELYN CHIPOL SINACAAún no hay calificaciones
- 3.3. - Ley de La Conservacion de La MasaDocumento8 páginas3.3. - Ley de La Conservacion de La MasaJOSELYN CHIPOL SINACAAún no hay calificaciones
- Demand ADocumento1 páginaDemand AJOSELYN CHIPOL SINACAAún no hay calificaciones
- Practica 6 Unidad 4Documento5 páginasPractica 6 Unidad 4JOSELYN CHIPOL SINACAAún no hay calificaciones
- Apuntes Unidad II ApuntersDocumento22 páginasApuntes Unidad II ApuntersJOSELYN CHIPOL SINACAAún no hay calificaciones
- Humanidades Vape 15 y 17Documento2 páginasHumanidades Vape 15 y 17JOSELYN CHIPOL SINACAAún no hay calificaciones
- Lista de Cotejo Investigacion Documental U-4Documento2 páginasLista de Cotejo Investigacion Documental U-4JOSELYN CHIPOL SINACAAún no hay calificaciones
- Acotación de Formas Geométricas y de FabricaciónDocumento18 páginasAcotación de Formas Geométricas y de FabricaciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- El Ingeniero y El Dibujo Electromecanico 2Documento5 páginasEl Ingeniero y El Dibujo Electromecanico 2JOSELYN CHIPOL SINACA100% (1)
- Ubicación de La Materia en El Modulo de CostesDocumento2 páginasUbicación de La Materia en El Modulo de CostesJOSELYN CHIPOL SINACAAún no hay calificaciones
- Investigación MetrologíaDocumento4 páginasInvestigación MetrologíaJOSELYN CHIPOL SINACAAún no hay calificaciones
- Representación de Los Ajustes y Reglas de AcotacionDocumento4 páginasRepresentación de Los Ajustes y Reglas de AcotacionJOSELYN CHIPOL SINACAAún no hay calificaciones
- INTRODUCCIÓNDocumento4 páginasINTRODUCCIÓNJOSELYN CHIPOL SINACAAún no hay calificaciones
- Representaciones de Tolerancias Geométricas de La Forma y Las de PosiciónDocumento5 páginasRepresentaciones de Tolerancias Geométricas de La Forma y Las de PosiciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- DibujoDocumento3 páginasDibujoJOSELYN CHIPOL SINACAAún no hay calificaciones
- Wa0001Documento4 páginasWa0001JOSELYN CHIPOL SINACAAún no hay calificaciones
- Características de Representación de La Proyección CaballeraDocumento3 páginasCaracterísticas de Representación de La Proyección CaballeraChipol JoselynAún no hay calificaciones
- Disco Duro Protegido Con Contraseña - Asier Marqués PDFDocumento21 páginasDisco Duro Protegido Con Contraseña - Asier Marqués PDFHernan GilAún no hay calificaciones
- Principales Características de VisioDocumento2 páginasPrincipales Características de Visiodj0010Aún no hay calificaciones
- SumadorRestador4bitDocumento16 páginasSumadorRestador4bitNERY CRISTINAAún no hay calificaciones
- Mantenimiento preventivo de sistemas de seguridadDocumento3 páginasMantenimiento preventivo de sistemas de seguridadJohana Andrea Isaza Marin0% (1)
- Comandos NbtstatDocumento5 páginasComandos NbtstatGroskatrov RomanovAún no hay calificaciones
- Arquitectura HarvardDocumento4 páginasArquitectura HarvardCarlos PertuzAún no hay calificaciones
- Barpos H1000Documento1 páginaBarpos H1000Estrellita BelénAún no hay calificaciones
- Actividad de La Unidad 1 Metodologia de La Programacion de Sistemas InformaticosDocumento8 páginasActividad de La Unidad 1 Metodologia de La Programacion de Sistemas InformaticosEvitt Alfonso Espinosa MoralesAún no hay calificaciones
- Reactivos de VLSIDocumento4 páginasReactivos de VLSIStalin PintoAún no hay calificaciones
- FitproDocumento46 páginasFitproConstanzaGonzalezAún no hay calificaciones
- SAEPP: Sistema Automatizado para Elecciones del Poder PopularDocumento24 páginasSAEPP: Sistema Automatizado para Elecciones del Poder PopularUreña Futbol ClubAún no hay calificaciones
- Modificadores de Acceso y Sobrecarga de MétodosDocumento34 páginasModificadores de Acceso y Sobrecarga de MétodosjeshuitamAún no hay calificaciones
- Ap05 Aa6 Ev02 Diseno Arquitectura Si 5 PDF FreeDocumento22 páginasAp05 Aa6 Ev02 Diseno Arquitectura Si 5 PDF FreeSergio CastanedaAún no hay calificaciones
- 2° A Ensambla e Instala Controladores y Disp. PerifericosDocumento7 páginas2° A Ensambla e Instala Controladores y Disp. PerifericosPanzo Cotlame Yeidcol EstrellaAún no hay calificaciones
- 1 pdf2 3 4 5 6 MergedDocumento37 páginas1 pdf2 3 4 5 6 MergedPere Puigserver Ramos Ifc31aAún no hay calificaciones
- Explorar el uso de TCP/IP y el modelo OSI en Packet TracerDocumento20 páginasExplorar el uso de TCP/IP y el modelo OSI en Packet TracerEdward Alejandro BASTOS ROJASAún no hay calificaciones
- MU 0441 PVS T REGISTRO Ver 1809+Documento44 páginasMU 0441 PVS T REGISTRO Ver 1809+Alberto CesarAún no hay calificaciones
- Configurar DHCP en Los Routers CiscoDocumento11 páginasConfigurar DHCP en Los Routers CiscoIng. Lait TejadaAún no hay calificaciones
- Silabo Lenguaje de ProgramacionDocumento5 páginasSilabo Lenguaje de ProgramacionHéctor CarrilloAún no hay calificaciones
- Pricelist - S4W - May 19Documento317 páginasPricelist - S4W - May 19amirophobiaAún no hay calificaciones
- Ejercicios Resueltos ArreglosDocumento5 páginasEjercicios Resueltos Arreglosjavier0% (1)
- U1 S2 SoluciónActividadDocumento7 páginasU1 S2 SoluciónActividadAxlLedesmaAún no hay calificaciones
- GSA SAC Capacitaciones ManualReportes I PDFDocumento47 páginasGSA SAC Capacitaciones ManualReportes I PDF31944537Aún no hay calificaciones
- Manual Del Programador PIC-605Documento2 páginasManual Del Programador PIC-605ERNESTO DIAZ SAún no hay calificaciones
- Gl-N° 01 - PooDocumento6 páginasGl-N° 01 - PooRaul LopezAún no hay calificaciones
- Tutorial de Wampserver.Documento11 páginasTutorial de Wampserver.FerchaAún no hay calificaciones
- Entrada y Salida Getchar y PutcharDocumento4 páginasEntrada y Salida Getchar y Putcharcbaers1Aún no hay calificaciones
- Trabajo Final IpsDocumento3 páginasTrabajo Final IpsMELANY MEYLIN RIOS CASTILLOAún no hay calificaciones
- SOM Tarea2Documento4 páginasSOM Tarea2Javier carrascosa ToribioAún no hay calificaciones
- Manual de Borland C++Documento25 páginasManual de Borland C++Angel Olvera57% (7)