También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- MEDIDOR rpm.docxDocumento8 páginasMEDIDOR rpm.docxLuis BravoAún no hay calificaciones
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Informe Laboratorio FINALDocumento10 páginasInforme Laboratorio FINALMiguel GuarínAún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Control de Corriente AlternaDocumento15 páginasControl de Corriente AlternaFRANCISCO JAVIER SANABRIA ROMEROAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Informe Practica 4 PDFDocumento9 páginasInforme Practica 4 PDFFranco Pérez MuñozAún no hay calificaciones
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- Laboratorio No.2 Caracterizacion Motor DCDocumento5 páginasLaboratorio No.2 Caracterizacion Motor DCAlexis BarcoAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Paper EncoderDocumento9 páginasPaper EncoderKarla ConstanzaAún no hay calificaciones
- Laboratorio 1Documento9 páginasLaboratorio 1CRISTOBAL MORENO MONTOYAAún no hay calificaciones
- Arquitectura de Microcontroladores - Práctica 4Documento3 páginasArquitectura de Microcontroladores - Práctica 4Oswaldo Emmanuel Fonseca UribeAún no hay calificaciones
- Medidor de Velocidad RFDocumento4 páginasMedidor de Velocidad RFHeiner Madera DuarteAún no hay calificaciones
- Laboratorio 1Documento9 páginasLaboratorio 1CRISTOBAL MORENO MONTOYAAún no hay calificaciones
- Lab-05 - Digitales EncoderDocumento8 páginasLab-05 - Digitales EncoderCristian Steven Castañeda BelloAún no hay calificaciones
- S09.s1 MotoresDocumento28 páginasS09.s1 MotoresSeesaw 1619Aún no hay calificaciones
- Proyecto1 JorgefigueroaDocumento8 páginasProyecto1 JorgefigueroaJorge Figueroa ReyesAún no hay calificaciones
- Reporte Practica 5Documento13 páginasReporte Practica 5Juan Pablo HurtadoAún no hay calificaciones
- CUESTIONES TEMA 4 PLCs - SolucionesDocumento5 páginasCUESTIONES TEMA 4 PLCs - SolucionesEduar Jara AlcaldeAún no hay calificaciones
- Control de Ensayos en Maquina de Charpy Mediante Un GLCD y Un Teclado Matricial - para CombinarDocumento11 páginasControl de Ensayos en Maquina de Charpy Mediante Un GLCD y Un Teclado Matricial - para CombinarCarlos CapillaAún no hay calificaciones
- Generación de Ondas SPWM Con ArduinoDocumento6 páginasGeneración de Ondas SPWM Con ArduinoYeimir Jiménez0% (1)
- SeguidorfinalDocumento11 páginasSeguidorfinalDavid Rincón SánchezAún no hay calificaciones
- Laboratorio No.2 Caracterizacion Motor DCDocumento5 páginasLaboratorio No.2 Caracterizacion Motor DCAlexis BarcoAún no hay calificaciones
- RPMDocumento18 páginasRPMLeonid RamosAún no hay calificaciones
- Control DC Basado en Matlab PDFDocumento16 páginasControl DC Basado en Matlab PDFNoe Muñoz QuitoAún no hay calificaciones
- P10 U3Documento12 páginasP10 U3Román ZarazúaAún no hay calificaciones
- Reporte Cabina SanitizadorDocumento19 páginasReporte Cabina SanitizadorOrlando HerradaAún no hay calificaciones
- Seguidor de Linea AtmeDocumento9 páginasSeguidor de Linea Atmearmando carpasAún no hay calificaciones
- Infor de TTL 7404, 7408 y 7432Documento15 páginasInfor de TTL 7404, 7408 y 7432frandyAún no hay calificaciones
- PLC actividad 1Documento13 páginasPLC actividad 1Julian Zapata RestrepoAún no hay calificaciones
- Informe Encoder Chimbana LeninDocumento8 páginasInforme Encoder Chimbana LeninJessica PilatasigAún no hay calificaciones
- Temporizadores, Decodificador, Codificador PDFDocumento10 páginasTemporizadores, Decodificador, Codificador PDFHOLA SOYGOKUAún no hay calificaciones
- ADC Dual SlopeDocumento4 páginasADC Dual SlopeJhonny MoyonAún no hay calificaciones
- T5C3 CtosDisparoD 183143 PDFDocumento10 páginasT5C3 CtosDisparoD 183143 PDFAlejandra PalaciosAún no hay calificaciones
- PLC Reporte PDFDocumento19 páginasPLC Reporte PDFAlberto EsJiAún no hay calificaciones
- Control de Motores DC Arduino, Motores DC, Arduino, Proyectos Con Arduino PDFDocumento10 páginasControl de Motores DC Arduino, Motores DC, Arduino, Proyectos Con Arduino PDFYrvin EscorihuelaAún no hay calificaciones
- Laboratorio 6 Arquitectura de Computadoras 2020 IIDocumento44 páginasLaboratorio 6 Arquitectura de Computadoras 2020 IILuis Matute del AguilaAún no hay calificaciones
- ADC DAC conversión digital análoga guíaDocumento7 páginasADC DAC conversión digital análoga guíajhonnymlf0% (1)
- Prueba de Entrada PLCDocumento3 páginasPrueba de Entrada PLCAlex Lion PpaccoAún no hay calificaciones
- Control Automático Del Nivel de Luz.Documento10 páginasControl Automático Del Nivel de Luz.Anthony C. Ortiz ArellanoAún no hay calificaciones
- Informe Control Motor DCDocumento13 páginasInforme Control Motor DCJimmyGallegosAún no hay calificaciones
- Informe de Laboratorio N5 PWMDocumento6 páginasInforme de Laboratorio N5 PWMJose Miguel LariosAún no hay calificaciones
- Programación de PLC y control de procesosDocumento3 páginasProgramación de PLC y control de procesosAlex Lion PpaccoAún no hay calificaciones
- Modalidad Y Simulacion Sistemas Mecatronicos: Actividad 3. Diseño de Electrónica de Un Carro ElectrónicoDocumento19 páginasModalidad Y Simulacion Sistemas Mecatronicos: Actividad 3. Diseño de Electrónica de Un Carro ElectrónicoAlexis EspinosaAún no hay calificaciones
- Cuestionario Tercera UnidadDocumento21 páginasCuestionario Tercera UnidadANDRES SEBASTIAN HIDALGO RUIZAún no hay calificaciones
- Manual Mantenimiento ArduinoDocumento19 páginasManual Mantenimiento ArduinoOsvaldo De LeonAún no hay calificaciones
- Laboratorio 03control de Velocidad de Motor CCDocumento3 páginasLaboratorio 03control de Velocidad de Motor CCVICENTE ALEXANDER CONDORI HUILLCAAún no hay calificaciones
- Generacion de SPWM en Arduino para Inversores TrifásicosDocumento6 páginasGeneracion de SPWM en Arduino para Inversores TrifásicosAbraham Santana NaranjoAún no hay calificaciones
- Lab Caracterizacion Motor DCDocumento3 páginasLab Caracterizacion Motor DCAndersson QuevedoAún no hay calificaciones
- Medidor de Ángulos Por Un Encoder RotatorioDocumento6 páginasMedidor de Ángulos Por Un Encoder RotatorioJUAN FELIPE CARO GILAún no hay calificaciones
- Practica 1 EADocumento7 páginasPractica 1 EALeandro Esteban GarciaAún no hay calificaciones
- Controlador Pid de Velocidad de Un Motor DC Control AnalogicoDocumento8 páginasControlador Pid de Velocidad de Un Motor DC Control AnalogicoCamilo A. Erazo RomànAún no hay calificaciones
- Arduino Con LabViewDocumento6 páginasArduino Con LabViewAndrew Israel QAún no hay calificaciones
- Taller SalinasDocumento45 páginasTaller SalinasAlfredo SalinasAún no hay calificaciones
- Prototipo de Proyecto PracticoDocumento17 páginasPrototipo de Proyecto PracticoNelson ZeceñaAún no hay calificaciones
- Control de velocidad de motor CC con ArduinoDocumento3 páginasControl de velocidad de motor CC con ArduinoALEXANDER OBREGON CASTELLANOSAún no hay calificaciones
- Sprint 3Documento21 páginasSprint 3David Barroso GAún no hay calificaciones
- Descripción, Modelo, Análisis y Control Del PendubotDocumento21 páginasDescripción, Modelo, Análisis y Control Del PendubotmikevillarrAún no hay calificaciones
- Amplificador de Audio Con 3 EtapasDocumento22 páginasAmplificador de Audio Con 3 EtapasFranklin Callalli AcostaAún no hay calificaciones
- Electrónica Analógica EAX33-4Documento5 páginasElectrónica Analógica EAX33-4yanneth57Aún no hay calificaciones
- Universidad Del MagdalenaDocumento6 páginasUniversidad Del MagdalenaJavier Jose Salgado RodriguezAún no hay calificaciones
- Dispositivos BipolaresDocumento3 páginasDispositivos BipolaresMaria GreenAún no hay calificaciones
- Amplificador Darlington 75mWDocumento6 páginasAmplificador Darlington 75mWLinda VanegasAún no hay calificaciones
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- Clase 18Documento41 páginasClase 18martin santa cruzAún no hay calificaciones
- Oscilador BiestableDocumento18 páginasOscilador BiestableJesé Quezada MartínezAún no hay calificaciones
- Practica 3.2 - 19100508Documento9 páginasPractica 3.2 - 19100508Jose Angel LomasAún no hay calificaciones
- LabSDLunV2-30,31,37-E8-P2-Operadores Lógicos Con Circuitos TTLDocumento13 páginasLabSDLunV2-30,31,37-E8-P2-Operadores Lógicos Con Circuitos TTLAngel CastilloAún no hay calificaciones
- Amplificador multietapa con acoplamiento RCDocumento3 páginasAmplificador multietapa con acoplamiento RCBrayan Leyva AAún no hay calificaciones
- (FyM) Kits Electronica AnalogicaDocumento14 páginas(FyM) Kits Electronica AnalogicaDeinis TopAún no hay calificaciones
- JFETDocumento7 páginasJFETJefferson CabezasAún no hay calificaciones
- Diferencia Entre MOSFET y El JFETDocumento13 páginasDiferencia Entre MOSFET y El JFETjhontlv321Aún no hay calificaciones
- Electronica DigitalDocumento301 páginasElectronica DigitalRicky Mclaughlin100% (2)
- Caracterización del SCR: Circuitos y mediciones básicasDocumento8 páginasCaracterización del SCR: Circuitos y mediciones básicasNico VarosAún no hay calificaciones
- Tema 3Documento16 páginasTema 3Marco Antonio VillegasAún no hay calificaciones
- Características de Operación Del BJTDocumento6 páginasCaracterísticas de Operación Del BJTv_kathyAún no hay calificaciones
- Como Controlar Un Relé Con Un TransistorDocumento18 páginasComo Controlar Un Relé Con Un TransistorDanilo LedesmaAún no hay calificaciones
- S06.s1Laboratorio 01amplificador de Simetria ComplementariaDocumento20 páginasS06.s1Laboratorio 01amplificador de Simetria ComplementariaDIEGO ESTEFANO PICHIHUA CARRERAAún no hay calificaciones
- ACTIVIDADno.2LIZ RODDocumento6 páginasACTIVIDADno.2LIZ RODGabriel MtzAún no hay calificaciones
- 2 - Dispositivos ElectronicosDocumento39 páginas2 - Dispositivos ElectronicosHuanChengAún no hay calificaciones
- ForoDocumento9 páginasForoMarcos maxwellAún no hay calificaciones
- Dispositivos electrónicos: Problemas de circuitos con transistores NPN y PNPDocumento3 páginasDispositivos electrónicos: Problemas de circuitos con transistores NPN y PNPjhonAún no hay calificaciones
- Practica Robot SeguidorDocumento3 páginasPractica Robot SeguidorBrayan GomezAún no hay calificaciones
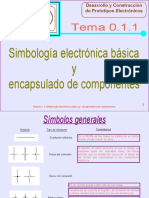
- Simbología Electrónica Básica y Encapsulado de ComponentesDocumento47 páginasSimbología Electrónica Básica y Encapsulado de ComponentesFRAILESAún no hay calificaciones
- Electronica Curso InfotepDocumento61 páginasElectronica Curso InfotepSmerlin Guzman100% (1)
- Guia 4 Componentes ElectrónicosDocumento15 páginasGuia 4 Componentes ElectrónicosRom Kno SanAún no hay calificaciones
- 1.2.1 SemiconductoresDocumento29 páginas1.2.1 SemiconductoresHernan HernandezAún no hay calificaciones
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Fundamentos de Programación: Diagramas de flujo, Diagramas N-S, Pseudocódigo y JavaDe EverandFundamentos de Programación: Diagramas de flujo, Diagramas N-S, Pseudocódigo y JavaAún no hay calificaciones
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones