También podría gustarte
- Manual Bt-50 Diesel Rev Octubre 2008Documento273 páginasManual Bt-50 Diesel Rev Octubre 2008kndcesar80% (15)
- Formato Permiso para Trabajo en AlturasDocumento8 páginasFormato Permiso para Trabajo en AlturasArturo Vanegas100% (1)
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Reacciones en Los Apoyos y Conexiones en Estructuras TridimensionalesDocumento8 páginasReacciones en Los Apoyos y Conexiones en Estructuras TridimensionalesJosue Rengifo MozombiteAún no hay calificaciones
- Evaluación Diagnostico Geometría 5°Documento6 páginasEvaluación Diagnostico Geometría 5°Náyade RubilarAún no hay calificaciones
- Manual de Operaciones de La Planta de Tratamiento de Agua Con Sistema de Osmosis InversaDocumento12 páginasManual de Operaciones de La Planta de Tratamiento de Agua Con Sistema de Osmosis Inversaguaji159100% (1)
- Tecnicas NarrativasDocumento23 páginasTecnicas NarrativasDennys Charcape AliagaAún no hay calificaciones
- Analisis Avanzado de Estructuras y Teoria de Elementos FinitosDocumento229 páginasAnalisis Avanzado de Estructuras y Teoria de Elementos FinitosAlvaro Said PérezAún no hay calificaciones
- Unidad 10 - Dinámica Del Movimiento RotacionalDocumento18 páginasUnidad 10 - Dinámica Del Movimiento RotacionalLucas GamboaAún no hay calificaciones
- Montaje de Modelos en Paciente Desdentado ParcialDocumento14 páginasMontaje de Modelos en Paciente Desdentado ParcialCote FatiganteAún no hay calificaciones
- Clase 9 Equilibrio de Cuerpos RígidosDocumento22 páginasClase 9 Equilibrio de Cuerpos RígidospedroAún no hay calificaciones
- Escuela de Ingeniería Mecánica: EstáticaDocumento18 páginasEscuela de Ingeniería Mecánica: EstáticaJOSTYN DANILO ESTUPIAN GONZALEZAún no hay calificaciones
- Semana 1 - Equilibrio de Una PartículaDocumento18 páginasSemana 1 - Equilibrio de Una PartículaMajo GutierrezAún no hay calificaciones
- Sesion 5Documento33 páginasSesion 5Franzxd crAún no hay calificaciones
- Semana 2 Fuerza y Reduccion VectoresDocumento42 páginasSemana 2 Fuerza y Reduccion VectoresGianfranco Araujo YatacoAún no hay calificaciones
- Cuadro Comparativo - MergedDocumento5 páginasCuadro Comparativo - MergedLourdes ZambranoAún no hay calificaciones
- Equilibrio de Cuerpos Rígidos (Presentación)Documento28 páginasEquilibrio de Cuerpos Rígidos (Presentación)StefanyAún no hay calificaciones
- Estatica: Equilibrio de Cuerpo RígidoDocumento35 páginasEstatica: Equilibrio de Cuerpo RígidokatyAún no hay calificaciones
- Sesión 04 2020-01 Mecánica Semana 02Documento21 páginasSesión 04 2020-01 Mecánica Semana 02Stefani Quijada QuispeAún no hay calificaciones
- Unidad 01 - Clase 01 - Estática - IDocumento65 páginasUnidad 01 - Clase 01 - Estática - IHamiel Kiara Ayala ChallcoAún no hay calificaciones
- Diagrama de Cuerpo Libre (CARDOZA)Documento9 páginasDiagrama de Cuerpo Libre (CARDOZA)FelixAún no hay calificaciones
- Tipos de ApoyosDocumento34 páginasTipos de ApoyosDaay MorenoAún no hay calificaciones
- Clase 1Documento13 páginasClase 1Andy peñafiel laraAún no hay calificaciones
- Análisis de ArmaduraDocumento28 páginasAnálisis de ArmaduraLeonardoo CruuzAún no hay calificaciones
- CLASE No 4 - EQUILIBRIO 3D PDFDocumento33 páginasCLASE No 4 - EQUILIBRIO 3D PDFMelissa VeraAún no hay calificaciones
- Ed - Cap - 3 - Equilibrio - de - Un - Cuerpo - Rigido - Part1Documento37 páginasEd - Cap - 3 - Equilibrio - de - Un - Cuerpo - Rigido - Part1Javier GarcíaAún no hay calificaciones
- Unidad 1 TensionesDocumento27 páginasUnidad 1 TensionesNicolás SánchezAún no hay calificaciones
- Sesión 5 - 30.09.22Documento30 páginasSesión 5 - 30.09.22Daniela LopezAún no hay calificaciones
- 2021 - 01 FII Semana - 01 Sesión 02Documento21 páginas2021 - 01 FII Semana - 01 Sesión 02Aldo SalcedoAún no hay calificaciones
- 3 Análisis de Circuitos de Corriente Alterna PDFDocumento28 páginas3 Análisis de Circuitos de Corriente Alterna PDFAlex GonzalesAún no hay calificaciones
- UD3 Dinámica de Una Partícula PDFDocumento49 páginasUD3 Dinámica de Una Partícula PDFDiego Cabrera DávilaAún no hay calificaciones
- Biomecánica Capítulo 3Documento12 páginasBiomecánica Capítulo 3lucialuzuriaga1Aún no hay calificaciones
- 3f1B AGUILAR QUINTANA ALEXIS EUSEBIODocumento56 páginas3f1B AGUILAR QUINTANA ALEXIS EUSEBIOAlexis AguilarAún no hay calificaciones
- Clase 8 - M8 Mecanica RacionalDocumento20 páginasClase 8 - M8 Mecanica RacionalAgustín MartinAún no hay calificaciones
- CapítuloDocumento16 páginasCapítuloRodrigo arancibiaAún no hay calificaciones
- S01 - s1 - Material Semana 01 - Generalidades, Vectores FuerzaDocumento34 páginasS01 - s1 - Material Semana 01 - Generalidades, Vectores Fuerzagamonalalexis465Aún no hay calificaciones
- Principio de Los Trabajos Virtuales2Documento20 páginasPrincipio de Los Trabajos Virtuales2Kenny Hernandez RodriguezAún no hay calificaciones
- Lab - 1 - Instrumentación y Control PDFDocumento15 páginasLab - 1 - Instrumentación y Control PDFYesicaAún no hay calificaciones
- 1.4 Equilibrio de La ParticulaDocumento18 páginas1.4 Equilibrio de La ParticulaJulius Fernandez MontielAún no hay calificaciones
- DINÁMICADocumento9 páginasDINÁMICARojas Chahua MoisesAún no hay calificaciones
- Estatica ExposicionDocumento17 páginasEstatica ExposicionErick Efrain Avelino ReyesAún no hay calificaciones
- Reacciones en Los Puntos de Apoyo y Cone Xi Ones de Una Estructura BidimencionalDocumento4 páginasReacciones en Los Puntos de Apoyo y Cone Xi Ones de Una Estructura BidimencionalJosue Fischmann100% (1)
- InglesDocumento4 páginasInglesivanAún no hay calificaciones
- Resistencia de Materiales Torsión y Esfuerzo en Vigas.Documento63 páginasResistencia de Materiales Torsión y Esfuerzo en Vigas.Jose YonerAún no hay calificaciones
- Equilibrio de La Partícula 2DDocumento2 páginasEquilibrio de La Partícula 2DFlores Rodiguez Johan AlexisAún no hay calificaciones
- UD3 Dinámica de Una PartículaDocumento54 páginasUD3 Dinámica de Una Partículajose villegas herediaAún no hay calificaciones
- Resumen de Cuerpo LibreDocumento3 páginasResumen de Cuerpo LibreAldair MartínezAún no hay calificaciones
- Procedimiento para El Análisis de ReaccionesDocumento15 páginasProcedimiento para El Análisis de ReaccionesLuis Miguel PintoAún no hay calificaciones
- Estatica ExpoDocumento48 páginasEstatica ExpoPedro Farro AbadAún no hay calificaciones
- Sesión 2 Sistemas Mecanicos Acelerados 2Documento15 páginasSesión 2 Sistemas Mecanicos Acelerados 2DARIO MORAAún no hay calificaciones
- Estatica Clase Ii UtpDocumento13 páginasEstatica Clase Ii UtpRicardoAún no hay calificaciones
- Estatica Clase Ii UtpDocumento13 páginasEstatica Clase Ii UtpRicardoAún no hay calificaciones
- Tarea No.3Documento13 páginasTarea No.3Miau FuaAún no hay calificaciones
- Estatica en El PlanoDocumento23 páginasEstatica en El PlanoindusaysAún no hay calificaciones
- Estática - FG366Documento18 páginasEstática - FG366Gustavo OrdoñezAún no hay calificaciones
- 005 Armaduras Entramados y MaquinasDocumento11 páginas005 Armaduras Entramados y MaquinasRodrigo VidalAún no hay calificaciones
- Equilibrio de Un Cuerpo Rígido en 2 Dimensiones - UCV 2022 IIDocumento33 páginasEquilibrio de Un Cuerpo Rígido en 2 Dimensiones - UCV 2022 IIGustavo CeliAún no hay calificaciones
- Definicion de Una ArmaduraDocumento15 páginasDefinicion de Una ArmaduraRodolfo GuajardoAún no hay calificaciones
- Cuerpos en Equilibrio 3d Y FDISDocumento18 páginasCuerpos en Equilibrio 3d Y FDISGisellHernándezAún no hay calificaciones
- Estructuras IsostaticasDocumento13 páginasEstructuras IsostaticasALEJANDRO ulisesAún no hay calificaciones
- FUERZADocumento29 páginasFUERZAMANUEL QUIPO LUQUEAún no hay calificaciones
- Estatica IDocumento24 páginasEstatica IAnonymous O45OKHlAún no hay calificaciones
- Armaduras Espaciales - Metodo de SeccionesDocumento20 páginasArmaduras Espaciales - Metodo de SeccionesAce [V͞ιrтυαl E͞ɴтerтαιɴмeɴт]Aún no hay calificaciones
- Practica N 13 HotdogDocumento14 páginasPractica N 13 HotdogJane Aravella Rodriguez RiveroAún no hay calificaciones
- Gestión Adlantada Siendo FiscalDocumento49 páginasGestión Adlantada Siendo Fiscaldiego lorzaAún no hay calificaciones
- Informe Cerro PalenqueDocumento13 páginasInforme Cerro PalenqueNICOLE ALEJANDRA REYESAún no hay calificaciones
- Gestión de Proyectos FUVIDITDocumento18 páginasGestión de Proyectos FUVIDITAndrés E Barrios AAún no hay calificaciones
- Informe - Presentacion Del Sistema y El Equipo (Quiroz, Ceballo, Chaparro, Garcia, Depablos)Documento8 páginasInforme - Presentacion Del Sistema y El Equipo (Quiroz, Ceballo, Chaparro, Garcia, Depablos)Carlos Alveiro Ceballo VergaraAún no hay calificaciones
- Actividad T3-01 BRaDNODocumento17 páginasActividad T3-01 BRaDNOALVAREZ MELO ANGEL JAFET INGENIER�A EN TECNOLOG�AS DE LA INFORMACI�N Y COMUNICACIONESAún no hay calificaciones
- T ListasElSalvadorDocumento178 páginasT ListasElSalvadorStephany SierraAún no hay calificaciones
- 15 La Oficina de Servicios PúblicosDocumento2 páginas15 La Oficina de Servicios PúblicosSteven agresottAún no hay calificaciones
- ReporteAlumnoMatricula PDFDocumento1 páginaReporteAlumnoMatricula PDFabnerson vela condeAún no hay calificaciones
- Montacargas de HorquillasDocumento14 páginasMontacargas de HorquillasOsscar Claro0% (1)
- 5162-Taller de Repaso Nº1 - Modelo Atómico y Tabla Periódica (PAES) 2023Documento10 páginas5162-Taller de Repaso Nº1 - Modelo Atómico y Tabla Periódica (PAES) 2023Constanza CeaAún no hay calificaciones
- La Artesanía ChilenaDocumento2 páginasLa Artesanía ChilenaNany PachecoAún no hay calificaciones
- HUMIDIFICACIONDocumento59 páginasHUMIDIFICACIONDante KillerAún no hay calificaciones
- Termodinamica EstelarDocumento18 páginasTermodinamica EstelarpeperiverosAún no hay calificaciones
- Vivienda Unifamiliar - MultifamiliarDocumento43 páginasVivienda Unifamiliar - MultifamiliarJefferson Velasquez MontoyaAún no hay calificaciones
- PMA TechoDocumento15 páginasPMA TechoNicolas FernandoAún no hay calificaciones
- Sustentacion Trabajo Colaborativo - Escenario 7 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B02)Documento5 páginasSustentacion Trabajo Colaborativo - Escenario 7 - PRIMER BLOQUE-CIENCIAS BASICAS - CALCULO II - (GRUPO B02)Juhesneydi Rojas FigueroaAún no hay calificaciones
- Catalogo de Recursos Forestales M y NDocumento34 páginasCatalogo de Recursos Forestales M y NBotanical RootsAún no hay calificaciones
- Operaciones Publico en GeneralDocumento3 páginasOperaciones Publico en GeneralJATZENI DIAZAún no hay calificaciones
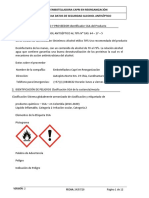
- Fds. Alcohol Antiseptico Capri Al 70Documento14 páginasFds. Alcohol Antiseptico Capri Al 70HERNAN MESA AYURE (MARA Y HERNAN)Aún no hay calificaciones
- El Material9ismo de SpinozaDocumento86 páginasEl Material9ismo de SpinozaJosué Castillo Guevara100% (1)
- Cuestionario de Las CélulasDocumento5 páginasCuestionario de Las CélulasPedriana LimaAún no hay calificaciones
- Lectura 2Documento11 páginasLectura 2Gilda Viveros Peredo100% (1)
- Hongos Superioresc Clase ArchiascomycetesDocumento4 páginasHongos Superioresc Clase ArchiascomycetesFranz omar Jamanca GonzalesAún no hay calificaciones