0% encontró este documento útil (0 votos)
696 vistas9 páginasTarea Mecanismos
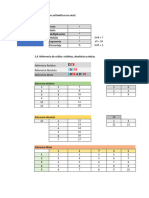
Este documento presenta conceptos básicos sobre mecanismos. Define eslabones, pares cinemáticos, nodos y grados de libertad. Luego identifica estos elementos en 10 mecanismos comunes como bisagras de automóvil, burro para planchar, columpio y limpiaparabrisas. Explica que los mecanismos están formados por eslabones, pares y nodos que conforman una cadena cinemática con cierta movilidad determinada por sus grados de libertad.
Cargado por
OLIVER ALVARADO MART�NEZDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
696 vistas9 páginasTarea Mecanismos
Este documento presenta conceptos básicos sobre mecanismos. Define eslabones, pares cinemáticos, nodos y grados de libertad. Luego identifica estos elementos en 10 mecanismos comunes como bisagras de automóvil, burro para planchar, columpio y limpiaparabrisas. Explica que los mecanismos están formados por eslabones, pares y nodos que conforman una cadena cinemática con cierta movilidad determinada por sus grados de libertad.
Cargado por
OLIVER ALVARADO MART�NEZDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd