También podría gustarte
- HyundaiDocumento71 páginasHyundaiEdson Thoniño Palomino La Fuente0% (1)
- Reporte Maquinas FlotacionDocumento9 páginasReporte Maquinas FlotacionvalerioAún no hay calificaciones
- S11. Sistema de Inyección EUIDocumento52 páginasS11. Sistema de Inyección EUIJarvikAún no hay calificaciones
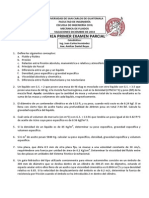
- Tarea Primer Parcial Mecanica de FluidosDocumento4 páginasTarea Primer Parcial Mecanica de FluidosDaisy Gramajo100% (1)
- EJercicios Campo Eléctrico 1Documento9 páginasEJercicios Campo Eléctrico 1Marco Salazar BlancoAún no hay calificaciones
- Bobcat b730 b750 RetroexDocumento3 páginasBobcat b730 b750 RetroexJose Tractor50% (2)
- CFSA3220 s1 Apunte 01Documento15 páginasCFSA3220 s1 Apunte 01Valeska SandovalAún no hay calificaciones
- Unidad 2 - Clase 5 - Movimiento en Dos DimensionesDocumento20 páginasUnidad 2 - Clase 5 - Movimiento en Dos Dimensionesyordan aguilar ruizAún no hay calificaciones
- Semana 3 - Clase 1 - Cinemática MRUVDocumento14 páginasSemana 3 - Clase 1 - Cinemática MRUVGrace NavarroAún no hay calificaciones
- TEMA 1 - DinámicaDocumento25 páginasTEMA 1 - DinámicaRigoberto Enoc TejadaAún no hay calificaciones
- Unidad IIDocumento52 páginasUnidad IIJessica SalgueroAún no hay calificaciones
- Unidad I NOTASDocumento55 páginasUnidad I NOTASGLORIA YULIET LOREDO ARREOLAAún no hay calificaciones
- Tema V Cinemática de La Partícula y Del Cuerpo Rígido-Comprimido PDFDocumento35 páginasTema V Cinemática de La Partícula y Del Cuerpo Rígido-Comprimido PDFAracely De AriasAún no hay calificaciones
- Guía de Estudio IIIDocumento14 páginasGuía de Estudio IIIJuanAún no hay calificaciones
- P1 Mrua AboDocumento21 páginasP1 Mrua AboPaulita VanegasAún no hay calificaciones
- Ejemplos Movimiento CircularDocumento2 páginasEjemplos Movimiento CircularCinthia cayo100% (1)
- Guia 3-Movimiento en Una DirecciónDocumento4 páginasGuia 3-Movimiento en Una DirecciónIvailo ApitzAún no hay calificaciones
- Clase 01 Cinemática de ParticulasDocumento20 páginasClase 01 Cinemática de Particulascamilo obregonAún no hay calificaciones
- Física I - Práctica de Laboratorio 04Documento22 páginasFísica I - Práctica de Laboratorio 04Kenny AndersonAún no hay calificaciones
- Tema01 DinámicaDocumento34 páginasTema01 DinámicaMarcos Oliverth Zúñiga ZapataAún no hay calificaciones
- Cinematrica de La ParticulaDocumento37 páginasCinematrica de La Particularicardohinojos19Aún no hay calificaciones
- Cinematrica de La ParticulaDocumento37 páginasCinematrica de La ParticulaGab HerresAún no hay calificaciones
- DINÁMICA Ejercicios ResueltosDocumento18 páginasDINÁMICA Ejercicios ResueltosJuan Jose Miranda NarroAún no hay calificaciones
- Lab Fisica Tema 2...Documento10 páginasLab Fisica Tema 2...Sergio Vilar CardozoAún no hay calificaciones
- Apunte de Movimiento BidimensionalDocumento9 páginasApunte de Movimiento Bidimensionalpame.cs03Aún no hay calificaciones
- Problemas de Dinamicas de Gases Por Ing. en Energia Gabriel GarciaDocumento81 páginasProblemas de Dinamicas de Gases Por Ing. en Energia Gabriel Garciagabriel alonsoAún no hay calificaciones
- Clase de Teoría de Semana 15Documento26 páginasClase de Teoría de Semana 15Juan Diego PerezAún no hay calificaciones
- Movimiento en Una Dimensión y en Un PlanoDocumento29 páginasMovimiento en Una Dimensión y en Un PlanoDiegoÁlvarezZúñigaAún no hay calificaciones
- Semana 15. Cálculo IDocumento15 páginasSemana 15. Cálculo IJHEFERSON NIJHER FERNANDEZ MUÑOZAún no hay calificaciones
- T2 Cinematica y Dinamica 201920Documento53 páginasT2 Cinematica y Dinamica 201920ButanoWill100% (1)
- Dinamica 1Documento21 páginasDinamica 1Angel Hinostroza SilvaAún no hay calificaciones
- 2 - UNIDAD 3 Resumen para El Práctico Tiro OblicuoDocumento3 páginas2 - UNIDAD 3 Resumen para El Práctico Tiro OblicuoRocio QuirogaAún no hay calificaciones
- 11 Sistema Cuerpo ResorteDocumento7 páginas11 Sistema Cuerpo ResorteYamile BerrocalAún no hay calificaciones
- Dinamica Imforme 01Documento9 páginasDinamica Imforme 01Maria Soledad Paucar ContoAún no hay calificaciones
- 1 Movimiento Rectilíneo de PartículasDocumento20 páginas1 Movimiento Rectilíneo de PartículasHerlin RoncalAún no hay calificaciones
- U1 Determinación Del Movimiento de Una PartículaDocumento25 páginasU1 Determinación Del Movimiento de Una PartículaGLORIA YULIET LOREDO ARREOLAAún no hay calificaciones
- Cap 4 - Movimiento Curvilíneo Normales TangencialesDocumento22 páginasCap 4 - Movimiento Curvilíneo Normales TangencialesAlfredo FitaAún no hay calificaciones
- Guia Meoson Sem 1Documento6 páginasGuia Meoson Sem 1Cesar LeonAún no hay calificaciones
- Cinemática.: Rodney Correa SolanoDocumento13 páginasCinemática.: Rodney Correa SolanoKay FernandezAún no hay calificaciones
- Semana 04 (2022-I)Documento27 páginasSemana 04 (2022-I)Nicole 16Aún no hay calificaciones
- MOVIMIENTO EN DOS DIMENSIONES - 1 (Vectores R, V, A) PDFDocumento18 páginasMOVIMIENTO EN DOS DIMENSIONES - 1 (Vectores R, V, A) PDFAdrian Jose Calderon AlverniaAún no hay calificaciones
- Evaluación Segundo ParcialDocumento6 páginasEvaluación Segundo ParcialJorge Miguel Valdivia Jim�nezAún no hay calificaciones
- LV01 MatLabDocumento4 páginasLV01 MatLabIngrid D. CarreñoAún no hay calificaciones
- Guia de Aprendizaje Movimiento Uniformemente Acelerado (M.u.a) - 2019-I (Guia 4)Documento7 páginasGuia de Aprendizaje Movimiento Uniformemente Acelerado (M.u.a) - 2019-I (Guia 4)Johan Esteban Acosta ArciniegasAún no hay calificaciones
- Sem 08-10-Espectros de RespuestaDocumento40 páginasSem 08-10-Espectros de RespuestaLorenaAún no hay calificaciones
- Dinamica Clase 3Documento18 páginasDinamica Clase 3Jenny ZeladaAún no hay calificaciones
- Hoja 7-Mov CircularDocumento34 páginasHoja 7-Mov CircularJosé JaramilloAún no hay calificaciones
- E.C. AplicadasDocumento10 páginasE.C. AplicadasJuan J Quispeluza ZamoraAún no hay calificaciones
- Movimiento Circular2Documento5 páginasMovimiento Circular2Luis PerníaAún no hay calificaciones
- Guiones Física I 3V 2021 - 2022Documento38 páginasGuiones Física I 3V 2021 - 2022CSIC OTOAún no hay calificaciones
- Cinemática - MRUVDocumento7 páginasCinemática - MRUVAye FedeleAún no hay calificaciones
- Ejercicios Resueltos Movimiento Armónico SimpleDocumento4 páginasEjercicios Resueltos Movimiento Armónico SimpleMarvin AvelarAún no hay calificaciones
- Taller Ecuaciones Diferenciales-2 CasosDocumento5 páginasTaller Ecuaciones Diferenciales-2 CasosCristian Cabrera ValenciaAún no hay calificaciones
- Informe 2 Oscilaciones Armonicas de Un Pendulo de ResorteDocumento10 páginasInforme 2 Oscilaciones Armonicas de Un Pendulo de ResorteMiguel Alejandro Deaza NiñoAún no hay calificaciones
- Informe Dinámica Grupo 2Documento9 páginasInforme Dinámica Grupo 2Alex QuilicheAún no hay calificaciones
- Sistemas Resorte Masa Movimiento Libre No AmortiguadoDocumento15 páginasSistemas Resorte Masa Movimiento Libre No AmortiguadoDesmond.PAún no hay calificaciones
- Movimiento OscilatorioDocumento8 páginasMovimiento OscilatorioRicardo Felipe Cortes MenayAún no hay calificaciones
- Facultad de Ingenieria: DinámicaDocumento20 páginasFacultad de Ingenieria: DinámicajairronaldolopezcruzAún no hay calificaciones
- S02.s2 - MaterialDocumento18 páginasS02.s2 - MaterialfidelAún no hay calificaciones
- TRABAJO Fen Meno de Vorticidad en Un TuboDocumento10 páginasTRABAJO Fen Meno de Vorticidad en Un TuboNicolay Abanto HuertaAún no hay calificaciones
- Módulo 3 - Clase 2023-2 - G1Documento30 páginasMódulo 3 - Clase 2023-2 - G1Mileydi Olivos fernandezAún no hay calificaciones
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Fenómenos de Transporte II - Ingeniería QuímicaDocumento81 páginasFenómenos de Transporte II - Ingeniería QuímicaElitaEmAún no hay calificaciones
- Preguntas de Repaso AdesDocumento2 páginasPreguntas de Repaso AdesMiley CruzAún no hay calificaciones
- Jitorres MAESTRO16.2017Documento164 páginasJitorres MAESTRO16.2017Berserkher 21Aún no hay calificaciones
- TALLER Corte 3Documento3 páginasTALLER Corte 3ALBERT NICOLAS MANCIPE MORALESAún no hay calificaciones
- Práctica #4-FusionadoDocumento5 páginasPráctica #4-FusionadoErnie Del Valle MaguiñaAún no hay calificaciones
- Wuolah Free Hangar CompletoDocumento7 páginasWuolah Free Hangar Completoivan fernandezAún no hay calificaciones
- Guia Sistema de Seguridad y Confort CorregidaDocumento73 páginasGuia Sistema de Seguridad y Confort CorregidaJosue SanangoAún no hay calificaciones
- Imforme Final de EstaticaDocumento37 páginasImforme Final de EstaticaBrayan Perez montenegroAún no hay calificaciones
- Tubo de PrandtlDocumento1 páginaTubo de PrandtlJose Gaudencio Coxcahua CoxcahuaAún no hay calificaciones
- Etanorm ManualDocumento28 páginasEtanorm ManualAnton S ZillerAún no hay calificaciones
- Clase 04. Ecuaciones de Lagrange. Casos y TeoriaDocumento36 páginasClase 04. Ecuaciones de Lagrange. Casos y Teoriarodrigornv33Aún no hay calificaciones
- Guía Taller #5 Octavos - Mecanismos 2Documento13 páginasGuía Taller #5 Octavos - Mecanismos 2Hernando SierraAún no hay calificaciones
- EFRAIN RETROCARGADOR Case 580SN - JOYSTICK-BRAZO ESTANDARDocumento4 páginasEFRAIN RETROCARGADOR Case 580SN - JOYSTICK-BRAZO ESTANDARHarol MendozaAún no hay calificaciones
- El Sonido BuenooooooooooooooDocumento32 páginasEl Sonido BuenooooooooooooooRodolfo Flores OyarceAún no hay calificaciones
- Taller de Dinmica Fsica 10 AB IIP-2011Documento12 páginasTaller de Dinmica Fsica 10 AB IIP-2011Alvaro Enrique Castro BeltranAún no hay calificaciones
- El Péndulo de Newton FinalDocumento35 páginasEl Péndulo de Newton Finalanderluque123Aún no hay calificaciones
- Trabajo FisicaDocumento14 páginasTrabajo FisicaAdolfo Vallejos VillegasAún no hay calificaciones
- EjerciciosDocumento15 páginasEjerciciosmiguel menaAún no hay calificaciones
- Memorias de CalculoDocumento21 páginasMemorias de CalculoJaime Mamani CardozoAún no hay calificaciones
- Laboratorio 3Documento24 páginasLaboratorio 3Dayana Suarez RamosAún no hay calificaciones
- Desplazamiento de NudosDocumento30 páginasDesplazamiento de NudosJhonny BravoAún no hay calificaciones
- 8386 - 5001-frm-11 - Cupon 1Documento5 páginas8386 - 5001-frm-11 - Cupon 1catmanmayAún no hay calificaciones
- 2.4.3. Diseño de Pav. GAZA Zapotal OKDocumento24 páginas2.4.3. Diseño de Pav. GAZA Zapotal OKJAVOCHOAAún no hay calificaciones
- Prueba N°1 Elementos de Máquinas - PautaDocumento5 páginasPrueba N°1 Elementos de Máquinas - PautaRAIZA ARANZAEZ QUINTANAAún no hay calificaciones