También podría gustarte
- Prueba-de-Fracciones-OCTAVO BASICODocumento5 páginasPrueba-de-Fracciones-OCTAVO BASICOCarmen Gloria100% (3)
- Introducción a la relatividad especialDe EverandIntroducción a la relatividad especialCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Texto de Apoyo MatematicasDocumento45 páginasTexto de Apoyo MatematicasMieguel MéndezAún no hay calificaciones
- Planeacion Matematicas 1 Jerarquia de Operaciones 20 Al 31 de MarzoDocumento11 páginasPlaneacion Matematicas 1 Jerarquia de Operaciones 20 Al 31 de MarzoCarolina JaimeAún no hay calificaciones
- Compendio de Fisica Walter PerezDocumento144 páginasCompendio de Fisica Walter PerezAngyBelAún no hay calificaciones
- SESGODocumento6 páginasSESGOYovanna del J. Echazarreta PechAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- DinámicaDocumento237 páginasDinámicaErick NavarreteAún no hay calificaciones
- Cinematica y DinamicaDocumento5 páginasCinematica y DinamicagerrancioAún no hay calificaciones
- Clase 3. Descripción Del MovimientoDocumento32 páginasClase 3. Descripción Del MovimientoRichard Icaro Esparza100% (1)
- Reporte 5 Fisica Basica Determinacion de Coeficiente de Friccion EstaticoDocumento8 páginasReporte 5 Fisica Basica Determinacion de Coeficiente de Friccion EstaticoRosa MariaAún no hay calificaciones
- Introducción Leyes de La DinámicaDocumento22 páginasIntroducción Leyes de La DinámicaIván DasimuAún no hay calificaciones
- Movimiento Unidimensional Parte IDocumento30 páginasMovimiento Unidimensional Parte IRoger SalgadoAún no hay calificaciones
- Rúbrica de Dinamica Corte 3 PDFDocumento10 páginasRúbrica de Dinamica Corte 3 PDFAngieDiazÁlvarezAún no hay calificaciones
- TRABAJO DE MATEMATICA IV Falta Dos EjerciciosDocumento24 páginasTRABAJO DE MATEMATICA IV Falta Dos EjerciciosMarianh Karey Colque CentenoAún no hay calificaciones
- Fisica 1 2020 1 p3 Gpo16 PDFDocumento29 páginasFisica 1 2020 1 p3 Gpo16 PDFSergio MontejoAún no hay calificaciones
- Informe de Laboratorio FisicaDocumento2 páginasInforme de Laboratorio Fisicabrigitte alejandra morales castiblancoAún no hay calificaciones
- Movimiento Unidimensional 2Documento27 páginasMovimiento Unidimensional 2guaycaAún no hay calificaciones
- Intro Ducci OnDocumento4 páginasIntro Ducci OnLeider Joanny Esteban LozanoAún no hay calificaciones
- Cinematica UnidimensionalDocumento27 páginasCinematica Unidimensionalnicolas dionisio ordonez barrueta50% (2)
- Cinematica I en Una Dimension 2009 BDocumento29 páginasCinematica I en Una Dimension 2009 Bnicolas dionisio ordonez barruetaAún no hay calificaciones
- Bitacora HHDocumento3 páginasBitacora HHBrayan GarcíaAún no hay calificaciones
- Mecanica 2022Documento3 páginasMecanica 2022Diana Cisneros AlcaAún no hay calificaciones
- Guia Semestral 2022Documento5 páginasGuia Semestral 2022Yuritzi GuzmánAún no hay calificaciones
- Unidad 1 Actividad 2 Mecanica de Medios Continuos Emmc - U1 - A2 - GierDocumento9 páginasUnidad 1 Actividad 2 Mecanica de Medios Continuos Emmc - U1 - A2 - GierGilberto EugenioAún no hay calificaciones
- Trabajo Desplazamiento Virtual y Funcion PotencialDocumento8 páginasTrabajo Desplazamiento Virtual y Funcion PotencialZurizaday LinaresAún no hay calificaciones
- Clase 0004 - Cantidadaes Cinemáticas y M.R.UDocumento35 páginasClase 0004 - Cantidadaes Cinemáticas y M.R.UDilan AcostaAún no hay calificaciones
- Dinámica Del Punto MaterialDocumento6 páginasDinámica Del Punto MaterialAmIn20122Aún no hay calificaciones
- Fisica Primer Avance (Revisar)Documento7 páginasFisica Primer Avance (Revisar)Sol SamillanAún no hay calificaciones
- S01 - Cinemática de La PartículaDocumento33 páginasS01 - Cinemática de La PartículavasquezsaavedramikeslaterAún no hay calificaciones
- 5 Laboratorio Colisiones 5Documento17 páginas5 Laboratorio Colisiones 5jose martinezAún no hay calificaciones
- Cinemática de La PartículaDocumento58 páginasCinemática de La PartículaEdber Salvador FloresAún no hay calificaciones
- UNM Fisica 2024 - T02 Fuerza y Momento - v04 (Compactada)Documento19 páginasUNM Fisica 2024 - T02 Fuerza y Momento - v04 (Compactada)Mauro WnAún no hay calificaciones
- UNM Fisica 2024 - T02 Fuerza y Momento - v03 (Compactada)Documento19 páginasUNM Fisica 2024 - T02 Fuerza y Momento - v03 (Compactada)María ÁlvarezAún no hay calificaciones
- Presentación - Grupo II - UNIDAD II Cantidad de Movimiento y ColisionesDocumento50 páginasPresentación - Grupo II - UNIDAD II Cantidad de Movimiento y ColisionesERICSON ERICSON DOMINGUEZ/REYESAún no hay calificaciones
- Trabajo de Investigacion U1Documento6 páginasTrabajo de Investigacion U1Andy MärciälAún no hay calificaciones
- 01 Dinamica T1Documento15 páginas01 Dinamica T1Juan VasquezAún no hay calificaciones
- Ensayo de Fisica Daniel Valenzuela Seccion 4Documento11 páginasEnsayo de Fisica Daniel Valenzuela Seccion 4Daniel ValenzuelaAún no hay calificaciones
- Clase Dinámica 01Documento59 páginasClase Dinámica 01Mirian ApazaAún no hay calificaciones
- Informe de Lab CapacitanciaDocumento8 páginasInforme de Lab CapacitanciaJhon AmorochoAún no hay calificaciones
- Cap 1Documento4 páginasCap 1DAYANA ALISSON BUSTAMANTE QUELALIAún no hay calificaciones
- Estatica Fuerzas Composicion - DescomposicionDocumento23 páginasEstatica Fuerzas Composicion - DescomposicionJosefina WillinerAún no hay calificaciones
- Dinamica ppt1Documento59 páginasDinamica ppt1Bryan QuentaAún no hay calificaciones
- Semana 3Documento73 páginasSemana 3Jossué Aarón Aguirre FloresAún no hay calificaciones
- 1 - Clase Mecánica 2m1 ElDocumento31 páginas1 - Clase Mecánica 2m1 ElBrandon BalmacedaAún no hay calificaciones
- Mec ClasDocumento34 páginasMec Clasdani112358Aún no hay calificaciones
- Cálculo de La GravedadDocumento5 páginasCálculo de La GravedadDiana Valeria Revelo MartínezAún no hay calificaciones
- Taller 3.conceptual Leyes de NewtonDocumento2 páginasTaller 3.conceptual Leyes de NewtonMadeley ZapataAún no hay calificaciones
- Tarea 2 Cinematica Unidad 2Documento19 páginasTarea 2 Cinematica Unidad 2carlos moraAún no hay calificaciones
- Física-3°-Ii BimDocumento45 páginasFísica-3°-Ii BimIsmael Anaya Villoslada100% (1)
- Sesion CuatroDocumento18 páginasSesion CuatroENMA LIZZET BERNAL TINEOAún no hay calificaciones
- Informe Grupal #6Documento3 páginasInforme Grupal #6Jairo Andrés BonillaAún no hay calificaciones
- Practica 3 - EstaticaDocumento4 páginasPractica 3 - EstaticaLisandro VLAún no hay calificaciones
- Fis100 t4 c1 2d ParcDocumento47 páginasFis100 t4 c1 2d ParcLolito SczAún no hay calificaciones
- Modelación de Sistemas FísicosDocumento145 páginasModelación de Sistemas FísicosAngelica Novoa100% (2)
- Fisica 510140 5Documento62 páginasFisica 510140 5olaAún no hay calificaciones
- Paper RoboticaDocumento9 páginasPaper RoboticaariannyAún no hay calificaciones
- Mapa MecanicaDocumento5 páginasMapa MecanicaGonzalo OsitoAún no hay calificaciones
- Cuestionario 3Documento7 páginasCuestionario 3Omar ViverosAún no hay calificaciones
- Laboratorio 10 (Máquina de Atwood)Documento8 páginasLaboratorio 10 (Máquina de Atwood)Jorge Daniel Guzmán ZapataAún no hay calificaciones
- G05 Leyes Newton 2-2023Documento17 páginasG05 Leyes Newton 2-2023XCrishaslandXAún no hay calificaciones
- Semana1 - Conceptos Fundamentales JEVAADocumento27 páginasSemana1 - Conceptos Fundamentales JEVAASebastian LopezAún no hay calificaciones
- Textodeecuacionesdiferenciales1 150110144148 Conversion Gate01Documento42 páginasTextodeecuacionesdiferenciales1 150110144148 Conversion Gate01CARLAAún no hay calificaciones
- Trabajo FinalDocumento7 páginasTrabajo FinalCHRISTIAN JONATHAN MOREDIA PADILLAAún no hay calificaciones
- Fecha Competencia Propósito: Experiencia de Aprendizaje 4Documento15 páginasFecha Competencia Propósito: Experiencia de Aprendizaje 4DamarishAún no hay calificaciones
- Capitulo 7 Intervalos de ConfianzaDocumento11 páginasCapitulo 7 Intervalos de ConfianzaJesusarrieta05Aún no hay calificaciones
- Area de Coordenadas PolaresDocumento3 páginasArea de Coordenadas PolaresKPAún no hay calificaciones
- Funcion Generadora de Momentos PDFDocumento6 páginasFuncion Generadora de Momentos PDFJhonatan VasconezAún no hay calificaciones
- Potencias y Raíces PDFDocumento2 páginasPotencias y Raíces PDFManuel Ventura SánchezAún no hay calificaciones
- 4 OA1O FuncionesDocumento22 páginas4 OA1O FuncionesHuguette Del Pila Barrera VeraAún no hay calificaciones
- FP Practica1Documento73 páginasFP Practica1Miguel André Salinas RevillaAún no hay calificaciones
- Práctica 2 - Capítulo 2Documento7 páginasPráctica 2 - Capítulo 2Kevin CorderoAún no hay calificaciones
- Regla de TresDocumento20 páginasRegla de TresHeidy Dayana Munevar LeonAún no hay calificaciones
- MAT - U5 - 3er Grado - Sesion 07Documento4 páginasMAT - U5 - 3er Grado - Sesion 07Cesar Rementeria MezaAún no hay calificaciones
- Vibración ForzadaDocumento38 páginasVibración ForzadaWilmer Jhonny Soriano OrtizAún no hay calificaciones
- VB 6.0 Variables y ConstantesDocumento13 páginasVB 6.0 Variables y Constantesearn40050% (2)
- 01 Matemáticas 6° Grado 23-24 (1) - Removed - Removed (1) - RemovedDocumento48 páginas01 Matemáticas 6° Grado 23-24 (1) - Removed - Removed (1) - Removedmarely.avilarAún no hay calificaciones
- AritméticaDocumento4 páginasAritméticahenry justiniano tuctoAún no hay calificaciones
- Mapa ConceptualDocumento9 páginasMapa Conceptualfabian_dzul213Aún no hay calificaciones
- Practica 10 Raz Mat Perim Log Areas Sin ClavesDocumento7 páginasPractica 10 Raz Mat Perim Log Areas Sin ClavesKati MamaniAún no hay calificaciones
- Guía de Aprendizaje Factor ComúnDocumento10 páginasGuía de Aprendizaje Factor ComúnAndres Perez100% (1)
- Sem 2.1 - PorcentajesDocumento17 páginasSem 2.1 - PorcentajesLuis Jorge Rivera MalpartidaAún no hay calificaciones
- CERO Medidas de Tendencia CentralDocumento1 páginaCERO Medidas de Tendencia CentralRosa BaezAún no hay calificaciones
- Taller Algebra Lineal 20Documento10 páginasTaller Algebra Lineal 20carlos sneider alfonso bautistaAún no hay calificaciones
- QRC Funciones EspecialesDocumento1 páginaQRC Funciones EspecialesLucrecia RibaltaAún no hay calificaciones
- Guia de Aprendizaje - Razonamiento Cuantitativo - Darling Javier DulceDocumento5 páginasGuia de Aprendizaje - Razonamiento Cuantitativo - Darling Javier DulceDJAVIER 11AAún no hay calificaciones
- Evaluación Sumas y Restas Con Canje 24-10-23 AdecuadaDocumento2 páginasEvaluación Sumas y Restas Con Canje 24-10-23 AdecuadaKarenAún no hay calificaciones
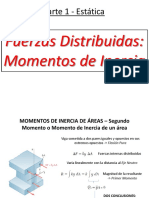
- UNIDAD 2b Estática Plana - Fuerzas Distribuidas, Momentos de InerciaDocumento29 páginasUNIDAD 2b Estática Plana - Fuerzas Distribuidas, Momentos de InerciaFranco De La TorreAún no hay calificaciones