También podría gustarte
- Energía Del MAS y AplicacionesDocumento15 páginasEnergía Del MAS y AplicacionesHELLEN YISELL CALDERON RODRIGUEZAún no hay calificaciones
- Procedimiento Instalac. BPV PDFDocumento11 páginasProcedimiento Instalac. BPV PDFANDREA LINETH100% (2)
- Capitulo 8 Dinámica de Rotación PDFDocumento28 páginasCapitulo 8 Dinámica de Rotación PDFDevran SmithAún no hay calificaciones
- Tabla Comparativa Propiedades de Los FluDocumento2 páginasTabla Comparativa Propiedades de Los FluSyd Barrett50% (2)
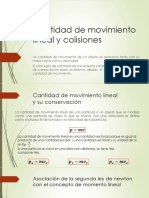
- Cantidad de Movimiento Lineal y ColisionesDocumento25 páginasCantidad de Movimiento Lineal y ColisionesHumberto Florez VillamizarAún no hay calificaciones
- Semana 10 - Impulso y Cantidad de MovimientoDocumento19 páginasSemana 10 - Impulso y Cantidad de MovimientoEduardo CentenoAún no hay calificaciones
- Capítulo 6 Dinámica Lineal 1Documento17 páginasCapítulo 6 Dinámica Lineal 1matemáticas ejerciciosAún no hay calificaciones
- Semana 07 - 2da Ley de Newton-FisicaDocumento15 páginasSemana 07 - 2da Ley de Newton-FisicaNoyAún no hay calificaciones
- Tema 14 CAP. 6 - VIBRACIONES MECANICAS 1Documento22 páginasTema 14 CAP. 6 - VIBRACIONES MECANICAS 1Jose Joan Layme BejarAún no hay calificaciones
- Segunda Ley de Newton y SRIDocumento22 páginasSegunda Ley de Newton y SRITONY DAVID CASTILLO ROJASAún no hay calificaciones
- (Clase 7) Potencia y Cantidad de Movimiento LinealDocumento11 páginas(Clase 7) Potencia y Cantidad de Movimiento LinealDaniel Rios PrietoAún no hay calificaciones
- Dinámica de RotaciónDocumento7 páginasDinámica de RotaciónAngélica MontalvoAún no hay calificaciones
- DinamicaDocumento5 páginasDinamicamiguel altamarAún no hay calificaciones
- F.1. 3° - Ley Conservación de La EnergiaDocumento19 páginasF.1. 3° - Ley Conservación de La Energiavickyferrer24642Aún no hay calificaciones
- Capitulo 8 Dinámica de RotaciónDocumento28 páginasCapitulo 8 Dinámica de RotaciónAlexander MarcoAún no hay calificaciones
- Choques o ColisionesDocumento12 páginasChoques o ColisionesING. Miguel Angel Sanchez Monzon0% (1)
- Fisica No. 6Documento24 páginasFisica No. 6Axel Padrino VillegasAún no hay calificaciones
- Semana 5Documento17 páginasSemana 5Usuario877Aún no hay calificaciones
- Ecuacion de La Energia: La Ley Del MovimientoDocumento18 páginasEcuacion de La Energia: La Ley Del MovimientoluceroAún no hay calificaciones
- Fisica I Utn-Frc: Unidad 6: Dinámica de Los SistemasDocumento11 páginasFisica I Utn-Frc: Unidad 6: Dinámica de Los SistemasmateoAún no hay calificaciones
- S02.s1 - Choques o ColisionesDocumento18 páginasS02.s1 - Choques o ColisionesCesar Alain Mori PadillaAún no hay calificaciones
- Solucionarios A Evaluaciones ReceptadasDocumento10 páginasSolucionarios A Evaluaciones Receptadasjackson aldazAún no hay calificaciones
- Conservación de La Cantidad de Movimiento y Choques-L9c8Documento5 páginasConservación de La Cantidad de Movimiento y Choques-L9c8Wichooo GironnnAún no hay calificaciones
- ColisionesDocumento4 páginasColisionespanteraonccaAún no hay calificaciones
- Dinamica Sistema Partículas 21-22Documento21 páginasDinamica Sistema Partículas 21-22Amanda De Miguel CatalanAún no hay calificaciones
- Aun Fi Ts015Documento17 páginasAun Fi Ts015Gerald KeenAún no hay calificaciones
- ChoquesDocumento11 páginasChoquesJose Maria Choque RomeroAún no hay calificaciones
- ElasticidadDocumento15 páginasElasticidadWalter Pacheco ChapoñanAún no hay calificaciones
- Clase 5 ColisionesDocumento25 páginasClase 5 ColisionesLuis Miguel MuneraAún no hay calificaciones
- M.A.Amortiguado y ForzadoDocumento33 páginasM.A.Amortiguado y ForzadoJOSE ZUBIETAAún no hay calificaciones
- Resumen Momento Lineal e Impulso @fisica - NotesDocumento3 páginasResumen Momento Lineal e Impulso @fisica - NotesJuliana GuevaraAún no hay calificaciones
- IRQ1-Solución de EjerciciosDocumento5 páginasIRQ1-Solución de EjerciciosMAURICIO ARMANDO JAEN FLOREZAún no hay calificaciones
- FisicaDocumento11 páginasFisicaTomas Mejia RivasAún no hay calificaciones
- Mecanica de Luidos Transporte de ReynoldsDocumento3 páginasMecanica de Luidos Transporte de ReynoldsGonzalo LezoAún no hay calificaciones
- Tema 2 Modelación Dinámica de SistemasDocumento18 páginasTema 2 Modelación Dinámica de SistemasMABAún no hay calificaciones
- (10mo) DinamicaDocumento23 páginas(10mo) DinamicaolmesAún no hay calificaciones
- Intensivo Uni - Física Semana 05Documento15 páginasIntensivo Uni - Física Semana 05josedflorescalachuaAún no hay calificaciones
- Balance Diferencial de EnergiaDocumento6 páginasBalance Diferencial de Energiaricky condeAún no hay calificaciones
- Cuerpo Rígido y EnergíaDocumento52 páginasCuerpo Rígido y Energíacuentafree1xdivaAún no hay calificaciones
- 7° ImpulsoDocumento27 páginas7° ImpulsoGerardo Manrique TelloAún no hay calificaciones
- Diapositivas FísicaDocumento50 páginasDiapositivas FísicaAlejandra VelandiaAún no hay calificaciones
- Choques de Cuerpos de Acuerdo A Su Velocidad, DireccionDocumento7 páginasChoques de Cuerpos de Acuerdo A Su Velocidad, DireccioncarlosAún no hay calificaciones
- En Cualquier Instante: +Documento18 páginasEn Cualquier Instante: +Nick S. Zegarra ChavezAún no hay calificaciones
- 13 Sistema de Referencia No InercialDocumento14 páginas13 Sistema de Referencia No InercialErick Molina AlcarrazAún no hay calificaciones
- 5) MÉTODO DE ENSAMBLES Y SU EQUIVALENCIA BDocumento4 páginas5) MÉTODO DE ENSAMBLES Y SU EQUIVALENCIA BJuan JskAún no hay calificaciones
- Semana 8 - Movimiento Armónico SimpleDocumento19 páginasSemana 8 - Movimiento Armónico SimpleJennifer RomeroAún no hay calificaciones
- Sistema de ParticulasDocumento12 páginasSistema de ParticulasjuancohAún no hay calificaciones
- S013.s3 REPASO PC2-2Documento17 páginasS013.s3 REPASO PC2-2Xiomara CMAún no hay calificaciones
- Cantidad de Movimiento y ColisionesDocumento22 páginasCantidad de Movimiento y ColisionesBenjamín Alfonso Valdez SalinasAún no hay calificaciones
- Mecanica de Luidos Transporte de ReynoldsDocumento3 páginasMecanica de Luidos Transporte de ReynoldsGonzalo LezoAún no hay calificaciones
- Tensor ResueltosDocumento26 páginasTensor ResueltosmanuelAún no hay calificaciones
- Ejercicios Resultos FisicaDocumento9 páginasEjercicios Resultos FisicaDevran SmithAún no hay calificaciones
- Web Conferencia - Unidad 2 - Tarea 2-16-04Documento28 páginasWeb Conferencia - Unidad 2 - Tarea 2-16-048621oskrAún no hay calificaciones
- Andres Camilo Leal RamosDocumento5 páginasAndres Camilo Leal RamosMateo PteAún no hay calificaciones
- PreguntasDocumento9 páginasPreguntasluis miguelAún no hay calificaciones
- ENVIO 2021 - InicialDocumento5 páginasENVIO 2021 - InicialKIESER DE LA PEÑA GASPARAún no hay calificaciones
- Física - Impulso (CepreUni 2019-I)Documento26 páginasFísica - Impulso (CepreUni 2019-I)Jafet PuyenAún no hay calificaciones
- InerciaDocumento1 páginaInerciaValentinaAún no hay calificaciones
- Dinámica de Los Sistemas de PartículasDocumento28 páginasDinámica de Los Sistemas de PartículasDiego Perez castroAún no hay calificaciones
- Guia 2: Ejercicios de RepasoDocumento13 páginasGuia 2: Ejercicios de RepasoAriana GrandeAún no hay calificaciones
- Física Electricidad - Repaso Final CaceresDocumento52 páginasFísica Electricidad - Repaso Final Caceresadhar o21Aún no hay calificaciones
- Semana 07 - B Impulso y Cantidad de MovimientoDocumento14 páginasSemana 07 - B Impulso y Cantidad de MovimientoAlex Sebastian Olgado NuñezAún no hay calificaciones
- Semana 04 - C Fuerza de FricciónDocumento7 páginasSemana 04 - C Fuerza de FricciónAlex Sebastian Olgado NuñezAún no hay calificaciones
- Química: Repaso SelecciónDocumento4 páginasQuímica: Repaso SelecciónAlex Sebastian Olgado NuñezAún no hay calificaciones
- Introducción A La FísicaDocumento2 páginasIntroducción A La FísicaAlex Sebastian Olgado NuñezAún no hay calificaciones
- Tema 5 - Metabolismo Energético - Respiración Celular 5to Sec Lsa 2022.Documento40 páginasTema 5 - Metabolismo Energético - Respiración Celular 5to Sec Lsa 2022.Alex Sebastian Olgado NuñezAún no hay calificaciones
- Tema 03 Nube ElectronicaDocumento13 páginasTema 03 Nube ElectronicaAlex Sebastian Olgado NuñezAún no hay calificaciones
- Desarrollo Embrionario y Métodos Anticonceptivos 3ro Sec Lsa 2020.Documento22 páginasDesarrollo Embrionario y Métodos Anticonceptivos 3ro Sec Lsa 2020.Alex Sebastian Olgado NuñezAún no hay calificaciones
- Uso de Mayusculas para Tercer Grado de SecundariaDocumento5 páginasUso de Mayusculas para Tercer Grado de SecundariaAlex Sebastian Olgado NuñezAún no hay calificaciones
- Aparato Reproductor II (Femenino) 3ro Sec Lsa 2020..Documento10 páginasAparato Reproductor II (Femenino) 3ro Sec Lsa 2020..Alex Sebastian Olgado NuñezAún no hay calificaciones
- Aparato Reproductor I (Masculino) 3ro Sec Lsa 2020.Documento16 páginasAparato Reproductor I (Masculino) 3ro Sec Lsa 2020.Alex Sebastian Olgado NuñezAún no hay calificaciones
- Separadores CentrifugosDocumento6 páginasSeparadores CentrifugosJesica Cabrera RochaAún no hay calificaciones
- Protocolo de Extracci N de Dna y Rna A Partir de Semillas y HojasDocumento25 páginasProtocolo de Extracci N de Dna y Rna A Partir de Semillas y HojasBrian David Viana CuestaAún no hay calificaciones
- DFADSEFRDocumento3 páginasDFADSEFRAleeFloresAún no hay calificaciones
- Pilotes Cargados Lateralmente-Friccion Negativa-1Documento5 páginasPilotes Cargados Lateralmente-Friccion Negativa-1Andrea MármolAún no hay calificaciones
- Agregados PetreosDocumento21 páginasAgregados PetreosGustavo NetzahuatlAún no hay calificaciones
- Curso Neumaticos Maquinaria Pesada Clasificacion Aplicaciones Caracteristicas TMPH Construccion Estructura Montaje AjusteDocumento55 páginasCurso Neumaticos Maquinaria Pesada Clasificacion Aplicaciones Caracteristicas TMPH Construccion Estructura Montaje AjusteReginaldo AraujoAún no hay calificaciones
- Diez Mandamientos de La Salud en Tercera EdadDocumento3 páginasDiez Mandamientos de La Salud en Tercera EdadAcacio Edmundo MacipAún no hay calificaciones
- 1er Entregable CDCDocumento29 páginas1er Entregable CDCMax Fiestas MolinaAún no hay calificaciones
- 24 1presentacion Simposio 2018 - cARLOS OCHOADocumento120 páginas24 1presentacion Simposio 2018 - cARLOS OCHOAangeljosAún no hay calificaciones
- Proyecto ElectromagnetismoDocumento3 páginasProyecto Electromagnetismoapi-382687980% (15)
- Protocolo Mantenimiento LaringoscopioDocumento6 páginasProtocolo Mantenimiento LaringoscopioGloria Milena Rojas100% (2)
- Segundo Taller de Introduccion - Mate. Ing. Ii-2018-IiDocumento4 páginasSegundo Taller de Introduccion - Mate. Ing. Ii-2018-IiRenzo CcopaAún no hay calificaciones
- Cálculo Cargas Térmicas PresentaciónDocumento19 páginasCálculo Cargas Térmicas PresentaciónRodrigo Rodriguez ArnezAún no hay calificaciones
- Documento 24Documento4 páginasDocumento 24kevin Aaron chavez ibarra100% (1)
- Guia Matematica N°6 Grado 10Documento8 páginasGuia Matematica N°6 Grado 10AngelAún no hay calificaciones
- Horno A6Documento2 páginasHorno A6Patricio LictaAún no hay calificaciones
- Metodo de Gauss Jordan 2Documento20 páginasMetodo de Gauss Jordan 2Jorge EsquerreAún no hay calificaciones
- Lab 12 Aldehidos y CetonasDocumento8 páginasLab 12 Aldehidos y CetonasMiguel MelilloAún no hay calificaciones
- TEMA2 - Caracterizacion de Un SCDocumento11 páginasTEMA2 - Caracterizacion de Un SCcarlos huaman quispeAún no hay calificaciones
- OLTCDocumento18 páginasOLTCsujerezAún no hay calificaciones
- Esterificación de ShiinaDocumento6 páginasEsterificación de ShiinaAlberto Antonio Alvarez AlvaradoAún no hay calificaciones
- Elpo 1Documento8 páginasElpo 1felipao3010Aún no hay calificaciones
- Unidad Iv Semana 12 - ColumnasDocumento72 páginasUnidad Iv Semana 12 - ColumnasArturo DuránAún no hay calificaciones
- Teoría de La Relatividad de EinsteinDocumento10 páginasTeoría de La Relatividad de EinsteinGonzález DanielAún no hay calificaciones
- Sistema de Humedificacion en Ventilacion MecanicaDocumento10 páginasSistema de Humedificacion en Ventilacion MecanicaFernando Antonio Mera CamposAún no hay calificaciones
- Proy Civ 2213 °5Documento9 páginasProy Civ 2213 °5Jorge Sarzuri LevaAún no hay calificaciones
- 5827esXL 1CXT1CXW Product Brochure 1LoRes PDFDocumento24 páginas5827esXL 1CXT1CXW Product Brochure 1LoRes PDFLuis Jose LlobanAún no hay calificaciones