Eficacia
CASO CLÍNICO del movimiento de rotación de caninos con el
sistema de alineadores Invisalign®
1. Doctora en Ciencias Odontológicas por la Univer-
sidad Complutense de Madrid.
Máster en Ortodoncia CEPUME-Universidad de Alca-
ARTÍCULO
lá de Henares (UAH).
2. Director del Máster de Ortodoncia CEPUME-Uni-
versidad de Alcalá de Henares (UAH).
Miembro Diplomado de la SEDO & Spanish Board
Orthodontics
Dra. Lara Vivero1 Dr. Manuel Román2
Resumen Resultados: En los casos de nuestro estu-
dio, un 54,28% del movimiento de rotación
planificado se tradujo en resultados clínicos.
Objetivo: El principal objetivo de este estu- Este porcentaje es del 51,32% en los caninos
dio es cuantificar el porcentaje del movimien- superiores y del 57,26% en los inferiores. La
to de rotación de caninos planificado que se proporción de movimiento planificado que se
va a expresar en los resultados clínicos para produce va en aumento hasta rotaciones de
establecer con mayor exactitud el porcentaje 15 grados, a partir de ese valor, se estabiliza la
de sobrecorrección a la hora de planificar este proporción del movimiento producido.
movimiento.
Conclusiones: En nuestro estudio encontra-
Material y métodos: En la muestra se inclu- mos que el movimiento de rotación de los
yeron 189 casos publicados en la Invisalign® caninos conseguido fue en torno a la mitad
Global Gallery, en los cuales se comparó, en del movimiento planificado, por lo que será
grados, el movimiento de rotación de cani- necesario monitorizar especialmente este mo-
nos planificado en el ClinCheck® inicial con la vimiento, sobre todo en rotaciones menores
planificación de ese mismo movimiento en el de 15º. Los autores recomiendan el uso ata-
ClinCheck® de alineadores adicionales (refi- ches, incluso para rotaciones por debajo de
namiento). A partir de esos datos, se calculó 5º, comprobar el espacio mesiodistal liberan-
el porcentaje de movimiento no producido. El do los puntos de contacto, el uso de alineado-
test de Friedman y el test de correlación de res de sobrecorrección e incluso la utilización
Spearman fueron utilizados para correlacionar de técnicas auxiliares para evitar realizar uno
la proporción de movimiento conseguido con o varios refinamientos para alcanzar este mo-
otras variables. vimiento.
1 | Ortod. Esp. 2021; Vol. 59 (4); 575-584
Introducción aparatología auxiliar para facilitar estos movi-
mientos [5].
Los sistemas de ortodoncia con alineadores Los movimientos de rotación en dientes con
actualmente se encuentran firmemente ins- una forma anatómica redondeada de las co-
taurados en nuestra práctica diaria, gracias a ronas, como los caninos y los premolares, se
que han experimentado un importante desa- consideran poco predecibles con este sistema
rrollo junto con una creciente demanda por [6]
. Además de la morfología de la corona den-
parte de los pacientes. Nos encontramos en taria, la gran superficie radicular que se puede
un momento donde se busca la eficiencia en observar en los caninos va a jugar también un
estos sistemas de ortodoncia, en aras de obte- importante papel a la hora de limitar la pre-
ner mejores resultados y disminuir la duración dictibilidad de los movimientos de rotación en
de tratamiento utilizando menos recursos. estos dientes, ya que va a ser necesario aplicar
una mayor cantidad de fuerza a estos dientes
Esta eficiencia, en los sistemas de ortodoncia para conseguir el movimiento deseado [7]. Por
con alineadores, pasa por una correcta trans- otra parte, los caninos suelen tener un punto
ferencia de los movimientos planificados a la de contacto interproximal distal extenso, en el
situación clínica real del paciente al final del contacto con el primer premolar. Este punto
tratamiento. de contacto va a ejercer resistencia contra el
movimiento de rotación [8].
En el sistema Invisalign™ (Align Technology,
Inc.) el software ClinCheck® es la base de to- Los autores que han analizado el porcentaje
das las interacciones entre el clínico y el CAD de rotación planificada que finalmente se pro-
Designer, donde se planifican todos los mo- duce en estos dientes han observado porcen-
vimientos y vemos una simulación de los ob- tajes muy bajos, en la mayor parte de los casos
jetivos [1], [2]. A pesar de las recientes mejoras en torno al 50% [9].
en el sistema Invisalign, actualmente los movi-
mientos planificados en el ClinCheck® no van Para poder aumentar la predictibilidad de este
a transferirse por completo a la situación clíni- movimiento, algunos autores hacen diver-
ca del paciente. sas recomendaciones, como la colocación de
ataches [10], la obtención de espacio mediante
Si se conociera con exactitud el porcentaje de IPR (Interproximal Reduction – reducción in-
cada movimiento que se va a producir clíni- terproximal o stripping), expansión o el uso
camente, se podría prever esta complicación de “chewies” para evitar o disminuir la pérdi-
con una cantidad de hipercorrección y/o so- da de tracking [11], [12], así como la planificación
brecorrección determinadas en función de la de movimientos de compensación o sobreco-
proporción de movimiento que no se produ- rrección para estos movimientos menos pre-
cirá [3]. decibles [13].
En una revisión sistemática llevada a cabo por Esta última herramienta, de gran utilidad a la
Mortazavi et al en 2020[4], se concluyó que hora de mejorar la predictibilidad de los trata-
con sistemas de alineadores transparentes, la mientos de ortodoncia con alineadores, ha de
corrección de la rotación fue el movimiento ser cuidadosamente planificada y cuantificada
menos predecible en comparación con otros para poder ser empleada con eficacia.
movimientos.
Por lo tanto, el objetivo principal de este es-
En otra revisión sistemática, se observó una tudio será cuantificar la proporción del mo-
mayor limitación en los movimientos de rota- vimiento planificado que se va a traducir en
ción, recomendando el uso de ataches y/o de resultados clínicos en lo relativo a los movi-
Ortod. Esp. 2021; Vol. 59 (4); 575-584 | 2
Rotación de caninos con Invisalign®
mientos de rotación de caninos. Así, podre- maño muestral utilizando los datos obtenidos
mos calcular con mayor exactitud el porcenta- de esos 50 casos a modo de estudio piloto.
je de sobrecorrección que debemos planificar
en el ClinCheck®. Una vez hecho el cálculo del tamaño muestral
se obtuvo, para una población finita de 224
Por otra parte, también se va a evaluar la aso- casos y un intervalo de confianza del 95%, un
ciación entre la proporción de movimiento de tamaño muestral de n = 189 individuos, que
rotación de caninos conseguida y otras varia- será el tamaño muestral que se necesitará
bles, para así poder determinar qué casos van para alcanzar la máxima potencia estadística
a ser menos predecibles. de los test empleados.
En una hoja de cálculo se recogió, para cada
caso, el movimiento de rotación, en grados,
para cada uno de los caninos, tal y como se
reflejaba en la tabla de movimiento dentario
Material y Métodos del ClinCheck® inicial. A continuación, se re-
cogió el valor de este mismo movimiento para
cada canino en el ClinCheck® aprobado para
El presente trabajo se trata de un estudio con la fase de alineadores adicionales.
un diseño observacional y longitudinal retros-
pectivo. Para llevarlo a cabo, en los pacientes A continuación, se calculó la cantidad de ro-
incluidos en la muestra se ha analizado la si- tación producida como la diferencia entre
tuación final planificada en el primer Clin- la cantidad de rotación solicitada en el Clin-
Check® y se ha comparado con la situación Check® inicial y la cantidad de rotación solici-
inicial del ClinCheck® de alineadores adiciona- tada en el ClinCheck® de alineadores adicio-
les (refinamiento). La muestra se ha obtenido nales, ya que, idealmente, en la segunda fase
de entre los casos disponibles en la Invisalign® del tratamiento se planificaría la magnitud del
Global Gallery, cuya accesibilidad, unida a la movimiento que no se logró en la primera fase
gran cantidad de casos disponibles en la mis- de alineadores. A partir de esta segunda va-
ma, le otorgan un gran valor a la hora de rea- riable se calculó el porcentaje de movimiento
lizar un estudio como el presente [14]. producido en la fase inicial del tratamiento.
El reclutamiento de la muestra se hizo me- Previo al tratamiento estadístico de los datos
diante un muestreo no probabilístico de casos recogidos en el estudio, se recurrió al test de
consecutivos, siendo los criterios de inclusión Kolmogorov-Smirnov como prueba de nor-
aquellos casos tratados con Invisalign® Full o malidad. Según este test, nuestra muestra no
Comprehensive, cuyos alineadores estuviesen sigue una distribución normalizada, por lo que
fabricados con el material SmartTrack®. Se ex- se recurrió al uso de test no paramétricos.
cluyeron aquellos casos tratados por odontó-
logos generales o por profesionales sin for- Los movimientos de rotación planificados
mación especializada en ortodoncia, así como y solicitados para los caninos se evaluaron
casos en los que no se hubieran solicitado ali- desde el punto de vista de la estadística des-
neadores adicionales. criptiva para, a continuación, utilizar el test
de Friedman para comparar los movimientos
Aplicando estos criterios, se obtuvieron 224 conseguidos en los cuatro caninos.
casos. Una vez analizados los 50 primeros ca-
sos de la muestra, se realizó un cálculo del ta-
3 | Ortod. Esp. 2021; Vol. 59 (4); 575-584
Resultados Por último, en el primer ClinCheck® se planificó
una rotación media de 13,4 grados (DS=11,39)
para el canino inferior derecho, mientras que
La muestra estuvo formada por 189 indivi- en el set de alineadores adicionales se solicitó
duos, 52 de los cuales (27,5%) eran de sexo una rotación media de 4,3 grados para este
masculino y los 137 restantes (72,5%), de sexo diente (DS=4,4). En vista a los datos obtenidos
femenino. La edad de los participantes estaba en el presente estudio, podríamos concluir
en el rango de entre los 10 y los 59 años, con que se ha producido una rotación media de
una mediana de 27 años y una media de 27,79 9,09 grados (DS=10,6) en el 4.3, correspon-
años (DS = 9,66). diente a un 57,46% del movimiento solicitado.
En el ClinCheck® inicial, para el canino supe- A continuación, se hizo el test de Friedman
rior derecho se solicitó una rotación media para valorar la posible existencia de diferen-
de 11,66º (DS=10,6), mientras que para los cias en el movimiento de rotación conseguido
alineadores adicionales, la cantidad de rota- entre unos dientes y otros. Según esta prueba,
ción media planificada en los casos de nuestra no existen diferencias estadísticamente signi-
muestra fue de 5,06 grados. Según los datos ficativas (p>0,05) en el movimiento de rota-
obtenidos en el presente estudio, la rotación ción producido en los cuatro caninos.
que se produjo en el primer set de alineadores
fue de 6,59 grados (DS=9,69). Medido en por- Los casos de la muestra se dividieron, para
centaje, la rotación obtenida fue, de media, un cada canino, en ocho grupos en función de la
48,82% del movimiento solicitado. [Tabla 1] magnitud del movimiento de rotación solici-
tado en el ClinCheck® inicial. Para cada uno
La rotación media planificada para el canino de estos grupos, se calculó el porcentaje me-
superior izquierdo en el ClinCheck® inicial dio de rotación que se había producido en el
en los pacientes de nuestra muestra fue de primer set de alineadores. Estos resultados se
11,54º (DS=8,5), mientras que en los alinea- reflejan en la tabla 2.
dores adicionales se planificó una rotación de
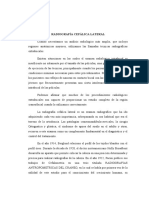
4,60 grados de media (DS=4,7). Así, el primer Como se puede apreciar en la tabla, para los
set de alineadores logró, para este diente, una cuatro dientes estudiados, el porcentaje de
rotación media de 6,94 grados (DS=8,4), que movimiento de rotación que realmente se
correspondería a un 53,8% de la rotación pla- produce aumenta progresivamente al aumen-
nificada en el ClinCheck® inicial. tar la magnitud del movimiento planificado
para esa fase del tratamiento. Este aumento
Para el canino inferior izquierdo, en el primer se detiene aproximadamente en los 15 grados
set de alineadores, correspondiente al Clin- de rotación, valor a partir del cual la variable
Check® inicial, se planificó una rotación media correspondiente al porcentaje de movimiento
de 13,24 grados en los casos de la muestra logrado se mantiene estable, aunque aumente
del presente estudio (DS=11,98). En cuanto al la cantidad de rotación planificada.
ClinCheck® correspondiente a los alineadores
adicionales, se solicitó una rotación media de
4,27 grados (DS=4,26). Por lo tanto, para el
canino inferior izquierdo se logró una rotación
media de 8,98 grados (DS=11,21) en el primer
set de alineadores, produciéndose un 57,05%
del movimiento de rotación planificado.
Ortod. Esp. 2021; Vol. 59 (4); 575-584 | 4
Rotación de caninos con Invisalign®
1.3. 2.3.
® ®
Clincheck Alineadores Clincheck Alineadores
Diferencia Diferencia
Inicial Adicionales Inicial Adicionales
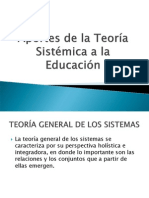
Media 11,68 4,99 6,7 11,54 4,6 6,94
Límite
95% de 10,12 4,27 5,27 10,3 3,91 5,71
inferior
intervalo de
Límite
confianza 13,24 5,7 8,13 12,78 5,28 8,18
superior
Media recortada al 5% 10,7 4,46 6,35 10,9 4,1 6,64
Mediana 8,3 3,85 3,85 9,65 3,25 5,9
Varianza 113,362 23,831 95,563 72,441 22,146 70,903
Desv. Desviación 10,647 4,882 9,776 8,511 4,706 8,42
Mínimo 0 0 -28 0 0 -15
Máximo 54 35 38 47 38 32
Rango 54 35 65 47 38 47
Rango intercuartil 14 5 12 12 5 11
Asimetría 1,369 2,329 0,566 1,269 2,727 0,638
Curtosis 1,72 8,929 0,855 2,307 13,941 0,397
3.3. 4.3.
® ®
Clincheck Alineadores Clincheck Alineadores
Diferencia Diferencia
Inicial Adicionales Inicial Adicionales
Media 13,24 4,27 8,98 13,4 4,3 9,09
Límite
95% de 11,49 3,64 7,33 11,73 3,67 7,54
inferior
intervalo de
Límite
confianza 14,99 4,89 10,62 15,06 4,94 10,65
superior
Media recortada al 5% 11,93 3,77 8,12 12,44 3,82 8,3
Mediana 9,5 2,95 5,7 10,55 2,9 6,5
Varianza 143,622 18,147 125,79 129,72 18,941 112,426
Desv. Desviación 11,984 4,26 11,216 11,389 4,352 10,603
Mínimo 0 0 -17 0 0 -12
Máximo 65 28 58 55 28 45
Rango 64 28 75 55 28 57
Rango intercuartil 13 4 13 16 5 13
Asimetría 1,705 2,213 1,319 1,104 2,006 1,132
Curtosis 3,402 6,849 2,352 0,97 5,607 1,449
TABLA 1: Valores medios obtenidos en la muestra.
5 | Ortod. Esp. 2021; Vol. 59 (4); 575-584
Discusión lign® Full o Invisalign® Comprehensive, evi-
tando así incluir en la muestra casos que se
hubieran tratado buscando cumplir objetivos
En el presente estudio, se ha analizado el mo- “parciales”.
vimiento de rotación de caninos con el siste-
ma de alineadores Invisalign®, al considerar- Al igual que ocurría en otros estudios, la mayor
se éste como uno de los movimientos menos parte de los integrantes de la muestra (72,5%)
predecibles en tratamientos de ortodoncia eran de género femenino. Esto puede respon-
con sistemas de alineadores. Calculando la di- der a una mayor demanda de tratamientos
ferencia entre el movimiento de rotación soli- estéticos entre la población femenina, que
citado en el primer ClinCheck® y la magnitud preferirán un tratamiento de ortodoncia más
de este mismo movimiento planificado en el estético, como son los sistemas con alineado-
ClinCheck® de alineadores adicionales, se ha res, antes que un tratamiento convencional,
estimado el porcentaje de movimiento de ro- con aparatología fija multibrackets.
tación que se había producido clínicamente.
En cuanto a la metodología, otros estudios
Nuestra muestra, tomada a partir de la Invi- analizaron la ocurrencia de unos movimien-
salign® Global Gallery, estuvo compuesta por tos u otros superponiendo, con un software
189 individuos. Esta muestra supera amplia- específico, los archivos .stl correspondientes a
mente en tamaño a las muestras empleadas los modelos digitales iniciales y finales [3], [7], [8],
por otros autores, con unos tamaños mues- [9], [15]
. Sin embargo, Invisalign® Global Gallery
trales de entre los 16 y los 38 individuos [2], [3], no permite exportar los modelos en forma-
[7], [8], [9], [15]
. to .stl, por lo que, en este trabajo, se estimó
este movim iento a partir de los movimientos
Según se ha observado en un estudio reali- planificados en la tabla de movimiento denta-
zado por Marques y colaboradores [16], exis- rio utilizando el software ClinCheck® Pro 5.6.
ten diferencias estadísticamente significativas Entre los estudios consultados para la realiza-
en la finalización de los casos de ortodoncia ción del presente trabajo, ningún otro autor
entre especialistas en ortodoncia y odontólo- empleó este sistema para cuantificar el movi-
gos generales que practican la ortodoncia sin miento producido por un set de alineadores.
tener formación adicional. En este mismo es-
tudio, un 96,7% de los casos presentados por En los casos de nuestra muestra, un 54,28%
ortodoncistas se considerarían aprobados se- del movimiento de rotación planificado en los
gún el índice ABO, mientras que únicamente cuatro caninos se tradujo en resultados clíni-
un 50% de los casos presentados por odon- cos. Este porcentaje es del 51,32% en los cani-
tólogos generales pasarían dicha prueba. Por nos superiores y del 57,26% en los inferiores.
este motivo, se decidió incluir en este estudio
únicamente aquellos casos que hubieran sido Nuestros resultados son similares a los obte-
tratados por ortodoncistas, excluyendo los ca- nidos por Lombardo y colaboradores [15], con
sos tratados por odontólogos generales. la diferencia de que, en su muestra, el porcen-
taje de movimiento producido en los caninos
También se excluyeron tratamientos cuyos superiores fue mayor que en los inferiores. En
alineadores hubieran sido fabricados en un el presente estudio, a pesar de tener un por-
material diferente del SmartTrack®, para evitar centaje de movimiento mayor en los caninos
que el material de los alineadores actuase a inferiores, no se observaron diferencias esta-
modo de factor de confusión. dísticamente significativas entre superiores e
inferiores, por lo que se considera que esta
Igualmente, se excluyeron casos tratados con discrepancia de movimientos podría deberse
opciones de tratamiento diferentes de Invisa- al azar.
Ortod. Esp. 2021; Vol. 59 (4); 575-584 | 6
Rotación de caninos con Invisalign®
Rotación
1.3 2.3 3.3 4.3
(Grados)
<1 0 % 14,29% 1 9,52% 5,56%
1-4,99 2 5,09% 28,78% 3 0,81% 24,19%
5-9,99 4 4,6% 4 9,37% 53,6% 66,44%
10-14,99 6 5,08% 63,64% 6 2,08% 64,39%
15-19,99 7 7,92% 67,35% 7 4,59% 70,12%
20-24,99 7 0,61% 73,82% 8 0,02% 67,78%
25-29,99 7 6,99% 84,46% 7 9,23% 74,33%
>30 70,86% 7 2,53% 83,55% 8 1,2%
TABLA 2: Porcentaje de rotación de caninos conseguida en función de la magnitud del movimiento de rotación planificado.
En cambio, en el estudio de Haouili [8], que el tercer grupo no se recurrió a IPR. A diferen-
no diferenció entre caninos superiores e infe- cia de los demás estudios, en ningún grupo
riores a la hora de exponer sus resultados, el se utilizaron ataches e IPR al mismo tiempo,
porcentaje de movimiento de rotación produ- lo que puede reducir en gran medida la pre-
cido fue ligeramente inferior al nuestro, de un dictibilidad del movimiento de rotación de los
47,43%. caninos. El tercer motivo, bajo nuestro punto
de vista, pudo ser la elección del atache verti-
La principal característica de esta publicación cal elipsoidal para realizar los movimientos de
fue la diferenciación entre la rotación mesial y rotación en los caninos, lo que explica el bajo
la distal. Estos autores concluyeron que la ro- porcentaje de rotación conseguida en el gru-
tación distal era mucho menos predecible que po de pacientes con ataches. En la actualidad,
la mesial, debido fundamentalmente al con- el uso de ataches optimizados [16] o el uso de
tacto interproximal distal de los caninos, de ataches verticales rentangulares biselados en
mayor superficie, y a la mayor dificultad para sentido contrario a la rotación, podrían mini-
efectuar IPR en la cara distal de los caninos, en mizar este efecto [18].
comparación a hacerlo en su cara mesial.
En vista a los resultados observados en estos
Por último, en el estudio de Kravitz [9] se ob- dos últimos estudios, uno de los principales
servan porcentajes globales de movimiento factores que dificultan los movimientos de
muy inferiores a los nuestros, y a los de otros rotación en los caninos son los contactos in-
autores. Esto puede deberse principalmente a terproximales fuertes, lo que explica el mayor
tres motivos. El primer motivo pudo ser el ma- porcentaje de movimiento conseguido en el
terial utilizado, previo al actual SmartTrack®. El estudio de Kravitz [9] en los pacientes del gru-
siguiente motivo pudo ser la división de los po de IPR, así como el menor porcentaje de
pacientes en tres grupos. En el primer grupo movimiento conseguido en las rotaciones dis-
no se utilizaron ataches ni IPR, en el segundo tales del estudio de Haouili [8].
grupo únicamente se colocaron ataches y en
7 | Ortod. Esp. 2021; Vol. 59 (4); 575-584
Como se ha mencionado previamente, el por- La primera recomendación sería no subesti-
centaje de movimiento de rotación que se mar las rotaciones menores de 15 grados. Si
produce en los cuatro caninos va aumentando bien clásicamente se han considerado como
conforme aumenta la magnitud de ese movi- menos predecibles las correcciones de rota-
miento que se ha planificado en el ClinCheck®. ciones mayores de esta cifra [19], en el presen-
Sin embargo, al llegar a los 15 grados de rota- te estudio se ha observado que las rotacio-
ción planificada, este porcentaje tiende a esta- nes que se producían en menor medida eran
bilizarse, sin aumentar ni disminuir el porcen- aquellas de menor magnitud.
taje de movimiento de rotación planificado
que realmente se produce. La colocación de ataches va a aumentar la su-
perficie del diente en contacto con el alinea-
Esta tendencia a una menor efectividad en dor y va a disminuir la tendencia del alinea-
el movimiento de rotaciones menores de 15 dor a “resbalar” sobre la superficie del diente,
grados podría indicar que el clínico tiende a contrarrestando la forma redondeada de la
“subestimar” estas rotaciones y a no recurrir corona de este. Actualmente el software co-
a técnicas que favorezcan la transferencia de loca ataches de rotación optimizados en ro-
este movimiento de rotación, como puede ser taciones mayores de 5º. Este puede ser otro
el IPR, la colocación de ataches, el uso de so- de los motivos por los que no se produzca el
brecorreción o la utilización de aparatología movimiento, ya que en rotaciones menores
auxiliar [8], [9]. de 5 grados el ClinCheck® no colocará ningún
tipo de atache. Nuestra propuesta es, en caso
de rotaciones menores de 5º o en caso de
que el software no coloque el atache de rota-
ción optimizado (ya sea porque no lo detecta,
porque colisiona con la arcada antagonista,
Extrapolación clínica de porque coloca otro tipo de atache o por otro
motivo) colocar un atache vertical rectangular
los resultados del estudio biselado en sentido contrario a la rotación, tal
y como ya nos introdujo Román en el 2009 [8].
En vistas a los resultados del presente estudio,
podemos concluir en una serie de recomen- Otra de las causas por las que en rotaciones
daciones para que, en la práctica clínica, los menores de 15º se alcanzaron peores resul-
tratamientos de ortodoncia realizados con el tados que en rotaciones mayores, puede ser
sistema Invisalign® puedan tener una mayor que el ClinCheck® tiene una jerarquía de ata-
predictibilidad. ches, y en caso de movimientos combinados,
si el movimiento de rotación es leve “ganará”
Cuando se planifica un movimiento de rota- el otro tipo de movimiento y no se colocará
ción de un canino, el porcentaje de ese mo- el atache de rotación. Por ejemplo, en caso
vimiento que se va a traducir en un resultado de un canino inferior con rotación leve y tip
clínico o en un movimiento dentario va a en- radicular mesiodistal moderado, el softwa-
contrarse hasta un 50% del movimiento pla- re colocará un atache optimizado de control
nificado. Por lo tanto, será de gran importan- radicular en lugar del atache optimizado de
cia la planificación y monitorización de todos rotación.
los movimientos de desrotación de caninos,
incluyendo especialmente aquellas que, por Por otra parte, la reducción interproximal (IPR)
su menor magnitud, pueden parecer menos disminuirá la resistencia que ejerce el punto
complejas y llevar al clínico a no monitorizar de contacto interproximal al movimiento de
su progreso de una forma adecuada. rotación del canino. Esto va a tener mayor
Ortod. Esp. 2021; Vol. 59 (4); 575-584 | 8
Rotación de caninos con Invisalign®
importancia en la cara distal, ya que el pun- La primera de estas limitaciones implica que,
to de contacto con el primer premolar tiene utilizando casos de la Invisalign® Global Ga-
una superficie muy amplia, dificultando espe- llery, estamos recurriendo a casos que han
cialmente las rotaciones distales. Viendo los sido enviados por los propios profesionales
resultados de otros autores, el IPR puede te- y, por lo tanto, seleccionados por los mismos.
ner una mayor influencia que la colocación de Aquellos casos en los que los objetivos del
ataches sobre la efectividad del movimiento tratamiento no hayan sido alcanzados no van
de rotación [8]. a registrarse en esta plataforma y, por lo tanto,
han sido involuntariamente excluidos de este
Boyd propuso la norma “sobrecorrección estudio.
11/10” para realizar movimientos de rotación
con alineadores. Según este autor, habría que A diferencia de otros estudios, en el presente
sobrecorregir el movimiento de rotación, pla- trabajo no se ha diferenciado entre rotación
nificando una rotación de 11 grados por cada mesial y distal de los caninos. En vistas a los
10 grados que se quiera rotar [20]. Sin embar- resultados de otros estudios que sí lo han he-
go, viendo los resultados de este estudio po- cho, sería interesante hacer esta distinción en
dríamos sugerir que esta sobrecorrección del futuros estudios.
10% puede no ser suficiente en el caso de los
caninos y otros dientes con coronas redon- Tampoco hemos diferenciado entre el tipo de
deadas, proponiendo así para estos dientes rotación, es decir, rotación pura sobre el eje
una sobrecorrección 14/10 o, incluso, 15/10. del diente (como una bailarina) o tomando
Esta propuesta, antes de su aplicación clíni- el centro de rotación en un eje paraaxial del
ca, requeriría de más estudios que pudieran diente (como la bisagra de una puerta).
apoyarla. No obstante, en este apartado reco-
Otra variable que no se ha tenida en cuen-
mendamos pedir 4 o incluso 8 alineadores de
ta, ha sido la relación entre la eficacia de la
sobrecorrección para las rotaciones de cani-
desrotación y la edad del paciente, pudiendo
nos en función de su magnitud.
ser previsiblemente más favorable en pacien-
Si, a pesar de la aplicación de estas técnicas, tes jóvenes y menos en pacientes de elevada
la rotación del canino sigue sin producirse al edad.
ritmo marcado por el ClinCheck®, podría ser
Otra propuesta de estudio sería contrastar las
recomendable recurrir al uso de técnicas au-
mediciones del ClinCheck Pro® mediante la
xiliares, como el uso de botones y elastomé-
superposición de archivos .stl iniciales y fina-
ricos (cadeneta elástica). Algunos autores
les, tal y como han hecho otros autores. Como
recomiendan incluso, en rotaciones muy mar-
hemos mencionado previamente, este dise-
cadas, el uso de estas técnicas auxiliares antes
ño de estudio no ha sido posible con nuestra
de comenzar con el tratamiento con alineado-
muestra por la imposibilidad de exportar los
res [18].
archivos desde la Invisalign® Global Gallery,
En este trabajo, cabe destacar una serie de li- por lo que se podría repetir este mismo estu-
mitaciones que no ha sido posible evitar, in- dio con otra muestra.
herentes fundamentalmente al diseño del es-
tudio.
9 | Ortod. Esp. 2021; Vol. 59 (4); 575-584
Discusión y Conclusiones Bibliografía
1. Dentro de los casos de nuestro estudio, el
porcentaje de movimiento de rotación pro- [1] Krieger E, Seiferth J, Marinello I, Jung BA,
ducido en los caninos fue de un 51,31% del Wriedt S, Jacobs C, et al. Invisalign(R) treat-
movimiento planificado en los caninos supe- ment in the anterior region: were the predic-
riores, y de un 57,26% en los inferiores. ted tooth movements achieved? J Orofac Or-
thop 2012 Sep;73(5):365-376.
2. El porcentaje de rotación conseguido en los
pacientes de nuestra muestra aumenta direc- [2] Dai FF, Xu TM, Shu G. Comparison of achie-
tamente al hacerlo la cantidad de rotación pla- ved and predicted tooth movement of maxi-
nificada hasta los 15 grados. A partir de este llary first molars and central incisors: First
valor, la predictibilidad de este movimiento se premolar extraction treatment with Invisalign.
mantiene estable. Esto nos puede indicar una Angle Orthod 2019;89(5):679-687.
tendencia a subestimar las rotaciones de me-
[3] Charalampakis O, Iliadi A, Ueno H, Oliver
nor magnitud, sin planificarlas lo suficiente y
DR, Kim KB. Accuracy of clear aligners: A re-
sin monitorizar su progreso de forma adecua-
trospective study of patients who needed re-
da durante el tratamiento.
finement. Am J Orthod Dentofacial Orthop
3. A la hora de aumentar la predictibilidad 2018 Jul;154(1):47-54.
de los movimientos de rotación de los cani-
[4] Mortazavi M, Naeim M, Badri A, Sharif R,
nos habrá que tener en cuenta la reducción
Hasheminasab M (2020) An updated systema-
interproximal para liberar los puntos de con-
tic review on the efectivity of clear aligner the-
tacto, la colocación de ataches (optimizados o
rapy: a review. J Craniomax Res 7(4):165–177.
biselados en sentido contrario a la rotación),
el uso de alineadores de sobrecorreción y, en [5] Rossini G, Parrini S, Castroflorio T, Dere-
algunos casos, del uso de técnicas auxiliares gibus A, Debernardi CL. Efficacy of clear alig-
antes del tratamiento para reducir la magni- ners in controlling orthodontic tooth move-
tud de esa rotación o durante el tratamiento ment: a systematic review. Angle Orthod 2015
para ayudar a alcanzar los objetivos. Sep;85(5):881-889.
4. Se podría realizar un extra de corrección o [6] Phan X, Ling P.Clinical Limitations of Invisi-
hipercorrección (pasarnos a la hora de corre- salign.JCDA April 2007, Vol. 73, No. 3
gir la rotación dejando el ClinCheck® en una
posición no ideal) de al menos un 10%, aun- [7] Grünheid T, Loh C, Larson BE. How accura-
que esta hipercorrección podría ser mayor, te is Invisalign® in nonextraction cases? Are
hasta el 40-50%, en los casos de rotaciones predicted tooth positions achieved? Angle Or-
de dientes redondos severas. Sin embargo, si thod 2017;6(809-815).
estos movimientos se lograsen tendríamos un
problema, ya que el resultado final no sería [8] Haouili N, Kravitz ND, Vaid NR, Ferguson
óptimo porque nos habríamos pasado, por lo DJ, Makki L. Has Invisalign® improved? A
que esta opción no nos gusta a los autores. prospective follow-up study on the efficacy of
tooth movement sith Invisalign. AJO-DO 2020.
5. Recomendamos el uso de 4 u 8 alineadores
de sobrecorrección para la rotación de cani- [9] Kravitz ND, Kusnoto B, Agran B, Viana G.
nos, equivalentes a 8 o 16 grados de sobreco- Influence of attachments and interproximal
rrección respectivamente. Podemos solicitar reduction on the accuracy of canine rotation
4 alineadores para las rotaciones menores de with Invisalign. A prospective clinical study.
15º y 8 alineadores para rotaciones mayores. Angle Orthod 2008 Jul;78(4):682-687.
Ortod. Esp. 2021; Vol. 59 (4); 575-584 | 10
Rotación de caninos con Invisalign®
[10] Simon M, Keilig L, Schwarze J, Jung BA, Nov 13;18(1):35-0.
Bourauel C. Forces and moments generated
by removable thermoplastic aligners: incisor [16] Marques LS, Freitas Junior N, Pereira LJ,
torque, premolar derotation, and molar dista- Ramos-Jorge ML. Quality of orthodontic treat-
lization. Am J Orthod Dentofacial Orthop 2014 ment performed by orthodontists and general
Jun;145(6):728-736. dentists. Angle Orthod 2012 Jan;82(1):102-
106.
[11] Bowman SJ. Improving the Predictability
of Clear Aligners. Sem Orth 2020. [17] Humber P. Rotating canines using the Invi-
salign® system. Aesth Dent Today 2013;7:30-
[12] Bowman SJ, Celenza F, Sparaga J, Papado- 34.
poulos MA, Ojima K, Lin JC. Creative Adjunts
for Clear Aligners. Part 2: Intrusion, Rotation, [18] Rivero J, Román M. La técnica Invisalign.
and Extrusion. JCO 2015;49(3):162-172. Expoorto’09. Primera edición. Ripano;2009
[13] Chan E DM. The Invisalign® appliance to- [19] Kravitz ND, Kusnoto B, BeGole E, Obrez
day: A thinking person’s orthodontic applian- A, Agran B. How well does Invisalign® work?
ce. Semin Orthod 2020. A prospective clinical study evaluating the
efficacy of tooth movement with Invisa-
[14] Invisalign® Global Gallery. 2020; Availa- lign. Am J Orthod Dentofacial Orthop 2009
ble at: https://global.invisaligngallery.com/ Jan;135(1):27-35.
es_es/. Accessed 11/15, 2020.
[20] Boyd RL. Predictability of successfull or-
[15] Lombardo L, Arreghini A, Ramina F, Huan- thodontic treatment using Invisalign. The
ca Ghislanzoni LT, Siciliani G. Predictability of Greater Philadelphia Society of Orthodontics.
orthodontic movement with orthodontic alig- . Accessed 01/12, 2020.
ners: a retrospective study. Prog Orthod 2017
11 | Ortod. Esp. 2021; Vol. 59 (4); 575-584
También podría gustarte
- Protocolo en Reversa 2113 4253 1 PBDocumento5 páginasProtocolo en Reversa 2113 4253 1 PBEduardo Ubillus DavilaAún no hay calificaciones
- Analisis CefalometricoDocumento26 páginasAnalisis CefalometricoRobertoManuelLeccaRojas100% (2)
- Dimension Vertical OclusalDocumento5 páginasDimension Vertical OclusalCarloncho MandujanoAún no hay calificaciones
- La calidad en el examen de maestría: Prótesis CompletasDe EverandLa calidad en el examen de maestría: Prótesis CompletasAún no hay calificaciones
- Protocolos para Tomografia ComputarizadaDocumento97 páginasProtocolos para Tomografia ComputarizadaKATERIN100% (2)
- Constancia Fiscal 2022Documento3 páginasConstancia Fiscal 2022Josue SimonAún no hay calificaciones
- Osteología- Sistema musculoesquelético: Guía de prácticas 2da Edición revisada y aumentadaDe EverandOsteología- Sistema musculoesquelético: Guía de prácticas 2da Edición revisada y aumentadaAún no hay calificaciones
- Aportes de La Teoría Sistémica A La EducaciónDocumento17 páginasAportes de La Teoría Sistémica A La Educaciónminimomax100% (4)
- ARTICULADOR SEMIAJUSTABLE... TeoriaDocumento16 páginasARTICULADOR SEMIAJUSTABLE... TeoriaGabii Rios0% (1)
- Plastia Inguinal, Abordaje Laparoscopico VS Abordaje Abierto: Experiencia en Centro Medico NavalDocumento9 páginasPlastia Inguinal, Abordaje Laparoscopico VS Abordaje Abierto: Experiencia en Centro Medico NavalIJAR JOURNALAún no hay calificaciones
- Protocolos para Tomografia Computarizada - CompressDocumento100 páginasProtocolos para Tomografia Computarizada - CompresscarlosAún no hay calificaciones
- Articulador SemiajustableDocumento4 páginasArticulador SemiajustableBaruch Hernandez PerezAún no hay calificaciones
- Eficacia Del Movimiento de Traslación en Caninos Mediante El Uso de Diferentes Ataches Con Alineadores: Resultados de Una Muestra de 160.Documento7 páginasEficacia Del Movimiento de Traslación en Caninos Mediante El Uso de Diferentes Ataches Con Alineadores: Resultados de Una Muestra de 160.Manuel Román JiménezAún no hay calificaciones
- Movimientos Complejos Del Sector Anterior Con Alineadores SecretalignerDocumento11 páginasMovimientos Complejos Del Sector Anterior Con Alineadores Secretaligners.medozasecretalignerAún no hay calificaciones
- Revista Española de Cirugía Ortopédica y TraumatologíaDocumento7 páginasRevista Española de Cirugía Ortopédica y TraumatologíaJonathan Mindiola SantanaAún no hay calificaciones
- Articulo 2 Momento Fuerza - En.esDocumento7 páginasArticulo 2 Momento Fuerza - En.esAlbeiro David Cordoba SolarteAún no hay calificaciones
- Proporción de Densidad de Sutura MediopalatinaDocumento10 páginasProporción de Densidad de Sutura MediopalatinaAlberto MinanoAún no hay calificaciones
- Evidencias Sobreimposición Del VtoDocumento8 páginasEvidencias Sobreimposición Del VtoAndre Pinos OrtegaAún no hay calificaciones
- Método KnebelmanDocumento7 páginasMétodo KnebelmanDariana Juárez G.Aún no hay calificaciones
- Comparación de Los Efectos de Tratamiento en Diferentes Métodos de Protracción Maxilar en Pacientes Esqueléticos de Clase IIIDocumento13 páginasComparación de Los Efectos de Tratamiento en Diferentes Métodos de Protracción Maxilar en Pacientes Esqueléticos de Clase IIIYerly Ramirez MuñozAún no hay calificaciones
- Ultimosoporte Posicionador para Artroplastia de CaderaDocumento2 páginasUltimosoporte Posicionador para Artroplastia de CaderaJoseFranciscoSanchezMateoAún no hay calificaciones
- Cefalometría Digital y ManualDocumento4 páginasCefalometría Digital y ManualJuan IncaAún no hay calificaciones
- Corrección de La Mordida Abierta AnteriorDocumento7 páginasCorrección de La Mordida Abierta AnteriordanielaAún no hay calificaciones
- Análisis de La Transportación FUERZAS BALANCEADASDocumento8 páginasAnálisis de La Transportación FUERZAS BALANCEADASDiana RubioAún no hay calificaciones
- 1.estudio Comparativo Entre La Cefalometria Digital y Manual Con Radiografias DigitalesDocumento4 páginas1.estudio Comparativo Entre La Cefalometria Digital y Manual Con Radiografias DigitalesCarlos A Neira MartínezAún no hay calificaciones
- Dinamica MandibularDocumento5 páginasDinamica MandibularFelipe Novoa OrellanaAún no hay calificaciones
- Revista Clínica de Periodoncia, Implantología y Rehabilitación Oral 0718-5391Documento8 páginasRevista Clínica de Periodoncia, Implantología y Rehabilitación Oral 0718-5391Elizabeth González SánchezAún no hay calificaciones
- Dimension Vertical Oclusal..Documento5 páginasDimension Vertical Oclusal..Adrian Salazar GomezAún no hay calificaciones
- 1 s2.0 S0213485318301488 MainDocumento7 páginas1 s2.0 S0213485318301488 Mainerick leonAún no hay calificaciones
- Evaluacio N Del Entrenamiento de Residentes en Cirugı ADocumento6 páginasEvaluacio N Del Entrenamiento de Residentes en Cirugı AAlberto Kenyo Riofrio PalaciosAún no hay calificaciones
- Aparatos IntraoralesDocumento6 páginasAparatos Intraorales14057022Aún no hay calificaciones
- Validación de Una Escala Reducida de Capacidad FuncionalDocumento6 páginasValidación de Una Escala Reducida de Capacidad FuncionalGilberto Bravo MaldonadoAún no hay calificaciones
- EjemploDocumento18 páginasEjemploDeivisAún no hay calificaciones
- Lione 2021Documento9 páginasLione 2021Yayis LondoñoAún no hay calificaciones
- Montaje Del Modelo SuperiorDocumento8 páginasMontaje Del Modelo SuperiortecyAún no hay calificaciones
- 3) Static Computer-Aided, Partially Guided, and Free-Handed Implant Placement A Systematic Review and Meta-Analysis of Randomized Controlled Trials - En.esDocumento28 páginas3) Static Computer-Aided, Partially Guided, and Free-Handed Implant Placement A Systematic Review and Meta-Analysis of Randomized Controlled Trials - En.esalestrada12345Aún no hay calificaciones
- Alargamiento AquilesDocumento8 páginasAlargamiento AquilesAlexAún no hay calificaciones
- Analisis Comparativo de La Inclinacion Final de Los Incisivos Despues Del Cierre de EspacioDocumento5 páginasAnalisis Comparativo de La Inclinacion Final de Los Incisivos Despues Del Cierre de EspaciopaolaAún no hay calificaciones
- Diseño Conceptual de Una Prótesis Policéntrica de Rodilla para Amputados Transfemorales en VenezuelaDocumento6 páginasDiseño Conceptual de Una Prótesis Policéntrica de Rodilla para Amputados Transfemorales en Venezuelajosephe.thrasherAún no hay calificaciones
- 1 s2.0 S2395921516300034 MainDocumento14 páginas1 s2.0 S2395921516300034 MainPaula VenegasAún no hay calificaciones
- Efectos de Trajes Ortésicos Dinámicos en MarchaDocumento20 páginasEfectos de Trajes Ortésicos Dinámicos en MarchaMaria Alejandra Garcia QuirogaAún no hay calificaciones
- Art 8Documento7 páginasArt 8Jeffry Francisco Campusano TorresAún no hay calificaciones
- Cartilla Proyecto Radiaciones Corregida Enero BERNARDO ALEXANDER ADocumento17 páginasCartilla Proyecto Radiaciones Corregida Enero BERNARDO ALEXANDER AcluosAún no hay calificaciones
- Utilidad de Las Reglas de Ottawa para El Tobillo y El Me - 2016 - Medicina GenerDocumento5 páginasUtilidad de Las Reglas de Ottawa para El Tobillo y El Me - 2016 - Medicina GenerhricaabiAún no hay calificaciones
- rpt.3401.fs1909014 Valoracion Fiabilidad Intra e InterobservadorDocumento6 páginasrpt.3401.fs1909014 Valoracion Fiabilidad Intra e InterobservadorWillian OcañaAún no hay calificaciones
- Fiabilidad y Correlación en La Evaluación de La Movilidad de RodillaDocumento6 páginasFiabilidad y Correlación en La Evaluación de La Movilidad de RodillaDayana Sánchez100% (1)
- Moi 181 eDocumento7 páginasMoi 181 eantonio dlAún no hay calificaciones
- Radiografia Cefalica LateralDocumento13 páginasRadiografia Cefalica LateralMarielisa KhouryAún no hay calificaciones
- Articulo Altura Condilar en Radiografias EspañolDocumento8 páginasArticulo Altura Condilar en Radiografias Españollaz384Aún no hay calificaciones
- Clinical Application of A Maximum Intercuspal Position Centric Relation Occlusion Conversion of A Lateral Cephalogram in The Treatment of Orthodontic Patients - En.esDocumento9 páginasClinical Application of A Maximum Intercuspal Position Centric Relation Occlusion Conversion of A Lateral Cephalogram in The Treatment of Orthodontic Patients - En.esarazeli VivAún no hay calificaciones
- Introducción Material Y MétodosDocumento1 páginaIntroducción Material Y MétodosM. Inferiror HEC. OYTAún no hay calificaciones
- Técnicas de Determinación de La Dimensión Vertical en Base A Registros Craneomandibulares en Pacientes Desdentados Totales. Revisión de La LiteraturaDocumento50 páginasTécnicas de Determinación de La Dimensión Vertical en Base A Registros Craneomandibulares en Pacientes Desdentados Totales. Revisión de La LiteraturafrankAún no hay calificaciones
- Tarea - ArticuladorDocumento3 páginasTarea - ArticuladorJanette RamírezAún no hay calificaciones
- Sayas - Eco Diafragmát - Arch BR 2020Documento3 páginasSayas - Eco Diafragmát - Arch BR 2020M. Belén Alonso OrtizAún no hay calificaciones
- Entrega FDocumento6 páginasEntrega FGabriela Rodriguez MartinezAún no hay calificaciones
- Sheridan2021 en EsDocumento5 páginasSheridan2021 en EsDiego EscobarAún no hay calificaciones
- Prueba Rotatoria. Técnica e Interpretaciòn.Documento5 páginasPrueba Rotatoria. Técnica e Interpretaciòn.david peñaAún no hay calificaciones
- Numero 7Documento10 páginasNumero 7Yhamile Elizabeth Machaca PereyraAún no hay calificaciones
- Current Status of Researches On JawDocumento15 páginasCurrent Status of Researches On JawpaolaAún no hay calificaciones
- Materiales y Metodos de Articulo Hirax yDocumento5 páginasMateriales y Metodos de Articulo Hirax yFelipeAún no hay calificaciones
- FX Periprotesicas HumeroDocumento10 páginasFX Periprotesicas Humerotonho navAún no hay calificaciones
- Instrumental 2.en - EsDocumento7 páginasInstrumental 2.en - EsCristian ValenciaAún no hay calificaciones
- Prohibido EnamorarseDocumento345 páginasProhibido EnamorarseMarylin YureyneAún no hay calificaciones
- Martillo Perforador Recargable 20 V LidlDocumento1 páginaMartillo Perforador Recargable 20 V LidlMario GarciaAún no hay calificaciones
- La FavoritaDocumento10 páginasLa FavoritaStefania CanteroAún no hay calificaciones
- Ensayo Orlando Fals BordaDocumento3 páginasEnsayo Orlando Fals BordaSebastian Bareño100% (2)
- Presentacion Ejercicio Civil CadDocumento42 páginasPresentacion Ejercicio Civil CadIng Ignacio Rojo GastelumAún no hay calificaciones
- Diseño de Sistemas de Concreto para Contención de Líquidos - Semana 3Documento27 páginasDiseño de Sistemas de Concreto para Contención de Líquidos - Semana 3Marcelo velasquez romeroAún no hay calificaciones
- Que Es La Función FactorialDocumento7 páginasQue Es La Función FactorialDaniel Martínes floresAún no hay calificaciones
- Jordi Barbeta. Ni Dios Ni PatrónDocumento1 páginaJordi Barbeta. Ni Dios Ni PatrónferrancabAún no hay calificaciones
- Informe de La ViolenciaDocumento2 páginasInforme de La ViolenciaJHOSELIN ROSEMARY ESCOBAR BERRIOSAún no hay calificaciones
- Tecnicas de Atencion Al ClienteDocumento6 páginasTecnicas de Atencion Al ClienteBELKI ARELY SOSA RIVASAún no hay calificaciones
- S Principios Quimicos 780Documento28 páginasS Principios Quimicos 780Peter Johan Jaime HernándezAún no hay calificaciones
- Tarea 2 Empresa 1Documento17 páginasTarea 2 Empresa 1Marisol TomásAún no hay calificaciones
- Tendencias 2030Documento16 páginasTendencias 2030MaryG_JAún no hay calificaciones
- InstruccionesDocumento14 páginasInstruccionesmagdalena sailemaAún no hay calificaciones
- Cuaderno de Informes 5Documento14 páginasCuaderno de Informes 5Brandon GnAún no hay calificaciones
- Fortalecimiento Aplicacion Practicas Sanitarias BovinosDocumento5 páginasFortalecimiento Aplicacion Practicas Sanitarias BovinospatriciaAún no hay calificaciones
- Ensayo 1 - Sonido DirectoDocumento5 páginasEnsayo 1 - Sonido DirectoKandyAún no hay calificaciones
- 1 PresentaciónDocumento4 páginas1 PresentaciónPriscilla DavisAún no hay calificaciones
- Control 1 Administracion de OperacionesDocumento3 páginasControl 1 Administracion de OperacionesJaviera Romero0% (3)
- 6t°gerencia en EnfermeriaDocumento63 páginas6t°gerencia en EnfermeriaAnonymous NaTJ5y1aAún no hay calificaciones
- Estudio Ambiental, Social y Predial - Tomo 2 PDFDocumento199 páginasEstudio Ambiental, Social y Predial - Tomo 2 PDFAldemir RojasAún no hay calificaciones
- Sentencia T 1095 de 2005Documento28 páginasSentencia T 1095 de 2005Sandra Jaramillo GonzálezAún no hay calificaciones
- Norma Internacional de Auditoria 580Documento2 páginasNorma Internacional de Auditoria 580UzzielAún no hay calificaciones
- Planeacion Docente U2 - AnálisisDocumento12 páginasPlaneacion Docente U2 - AnálisisOzkar GdoAún no hay calificaciones
- Ejercicio 4 - Capitulo 4 - FORMAS DE COHERENCIA TEXTUALDocumento1 páginaEjercicio 4 - Capitulo 4 - FORMAS DE COHERENCIA TEXTUALMiguel PovedaAún no hay calificaciones
- Mobiliario de Oficinas - VLK ProyectosDocumento27 páginasMobiliario de Oficinas - VLK ProyectosMiguel LimaAún no hay calificaciones
- Diagnóstico 5toDocumento4 páginasDiagnóstico 5toMorena CanoAún no hay calificaciones
- Tablero de Control National CleaningDocumento108 páginasTablero de Control National CleaningMichael CMAún no hay calificaciones