También podría gustarte
- Calculo de Factor de PotenciaDocumento6 páginasCalculo de Factor de PotenciaWin FloresAún no hay calificaciones
- Sistemas TrifasicosDocumento14 páginasSistemas Trifasicosadmh_192Aún no hay calificaciones
- Trabajo de SCRDocumento8 páginasTrabajo de SCRAguirre PalenciaAún no hay calificaciones
- Laboratorio 2 IndustrialDocumento5 páginasLaboratorio 2 IndustrialJorge LozanoAún no hay calificaciones
- Semana N 03Documento87 páginasSemana N 03Keyler RiosAún no hay calificaciones
- Sistemas de Accionamiento Eléctrico LAB 1-2Documento11 páginasSistemas de Accionamiento Eléctrico LAB 1-2NirvanaxDAún no hay calificaciones
- Inversion de GiroDocumento13 páginasInversion de GiroAlejandro RiveraAún no hay calificaciones
- Como Calcular El Capacitor de Un Motor MonofasicoDocumento6 páginasComo Calcular El Capacitor de Un Motor MonofasicoGerman Gabriel FernandezAún no hay calificaciones
- Elt-236 Arranques 4 y 5Documento10 páginasElt-236 Arranques 4 y 5Zack HayaAún no hay calificaciones
- Foro Temático de Transformadores.Documento15 páginasForo Temático de Transformadores.AJoel Facundo TCAún no hay calificaciones
- Sesion 03BDocumento13 páginasSesion 03BEzequiel RomeroAún no hay calificaciones
- Factor de PotenciaDocumento9 páginasFactor de PotenciaAle González JavierAún no hay calificaciones
- Arranque de Motores en CascadaDocumento3 páginasArranque de Motores en CascadaOlvan SuazoAún no hay calificaciones
- Reglamento de InstalacionesDocumento210 páginasReglamento de InstalacionesWill J CG100% (1)
- Instalaciones Electricas IndustrialesDocumento27 páginasInstalaciones Electricas IndustrialesalessandroAún no hay calificaciones
- Interruptor DiferencialDocumento62 páginasInterruptor DiferencialBen HurAún no hay calificaciones
- Insterruptores Diferenciales - Interruptores Magneticos. Puestas A TierraDocumento23 páginasInsterruptores Diferenciales - Interruptores Magneticos. Puestas A TierraHenrry PLAún no hay calificaciones
- Ejer Res PLC MotoresDocumento6 páginasEjer Res PLC Motoresmanuelsantos2007Aún no hay calificaciones
- Plantilla Institucional MatematicapptxDocumento30 páginasPlantilla Institucional MatematicapptxViviana Barboza0% (1)
- Grupo 2 - Presentación ControlesDocumento27 páginasGrupo 2 - Presentación ControlesCarmen CornejoAún no hay calificaciones
- Tr1 Tarea Automatismo 2021 20julio A AgostoDocumento21 páginasTr1 Tarea Automatismo 2021 20julio A AgostoJuan Eduardo Quichca SotoAún no hay calificaciones
- 02 Tarea 01 Sop FeDocumento55 páginas02 Tarea 01 Sop FeCARLOS RAMOS GONZALESAún no hay calificaciones
- Factor de Potencia, Que Es, Calcularlo, Corregirlo, EjerciciosDocumento24 páginasFactor de Potencia, Que Es, Calcularlo, Corregirlo, EjerciciosGabriel VelixAún no hay calificaciones
- Generador de DC PDFDocumento44 páginasGenerador de DC PDFDENYS ALFREDO SICLLA MACHICAOAún no hay calificaciones
- Instructivo Doblacon Tecnicas de Doblado de Tubo ConduitDocumento12 páginasInstructivo Doblacon Tecnicas de Doblado de Tubo Conduitoespana100% (1)
- Máquinas de Corriente Continua. Parte IDocumento53 páginasMáquinas de Corriente Continua. Parte IednajolopezAún no hay calificaciones
- El Contactor y AccesoriosDocumento35 páginasEl Contactor y AccesoriosGeorge AHAún no hay calificaciones
- HT05 Ie 2023Documento13 páginasHT05 Ie 2023lhuiz pumalloclla calderonAún no hay calificaciones
- Clase Trafo 5Documento111 páginasClase Trafo 5Arlington Ademir Horna MegoAún no hay calificaciones
- Seminario Accionamiento Eléctrico Parte 1Documento76 páginasSeminario Accionamiento Eléctrico Parte 1Anonymous bDl76usdvaAún no hay calificaciones
- TelurómetroDocumento25 páginasTelurómetroBruce Manrique Bonilla100% (2)
- Protecciones para Motores ElectricosDocumento11 páginasProtecciones para Motores ElectricosOscar RodriguezAún no hay calificaciones
- Autotransformadores: concepto, tipos, aplicaciones y conexionesDocumento55 páginasAutotransformadores: concepto, tipos, aplicaciones y conexionesArlington Ademir Horna MegoAún no hay calificaciones
- Alimentación Eléctrica de Máquinas IndustrialesDocumento6 páginasAlimentación Eléctrica de Máquinas IndustrialesGerman MartinezAún no hay calificaciones
- Allen Bradley - Uso de Disyuntores en Variadores de Frecuencia PDFDocumento8 páginasAllen Bradley - Uso de Disyuntores en Variadores de Frecuencia PDFRotsen Altuve100% (1)
- Contactores TrifasicosDocumento10 páginasContactores TrifasicosGabriel TorresAún no hay calificaciones
- Examen ELECTRICIDAD IDocumento6 páginasExamen ELECTRICIDAD IJESUS MANUEL POLO FERNANDEZAún no hay calificaciones
- Automatismos Basicos 2016 - 8Documento18 páginasAutomatismos Basicos 2016 - 8franco jorqueraAún no hay calificaciones
- Modulo 2 Arranque de MotoresDocumento41 páginasModulo 2 Arranque de MotoresAnthony Huacachi100% (1)
- Lámparas IncandescentesDocumento17 páginasLámparas IncandescentesJunior Cianuro JacksonAún no hay calificaciones
- Circuitos Trifásicos Balanceados PDFDocumento19 páginasCircuitos Trifásicos Balanceados PDFJhonatan A OrzAún no hay calificaciones
- Ejercicios Cálculo Protección MotoresDocumento13 páginasEjercicios Cálculo Protección MotoresEmilio BonnetAún no hay calificaciones
- Laboratorio 7 Maquinas Eléctricas 2Documento10 páginasLaboratorio 7 Maquinas Eléctricas 2Mark OnofreAún no hay calificaciones
- 04 141201171410 Conversion Gate01 PDFDocumento15 páginas04 141201171410 Conversion Gate01 PDFraul_giralAún no hay calificaciones
- Temporizador Estrella DeltaDocumento1 páginaTemporizador Estrella DeltaSergio Lazarte MercadoAún no hay calificaciones
- 1223384504.el ReleDocumento2 páginas1223384504.el ReleGaly Puentes FierroAún no hay calificaciones
- Guardamotor y SeccionadorDocumento10 páginasGuardamotor y SeccionadorAlexandra Yupanqui sarmientoAún no hay calificaciones
- 1 Ctos MagneticosDocumento56 páginas1 Ctos MagneticosBladyMaitaCiprianoAún no hay calificaciones
- Formacion Practica 02 - Semana 03Documento60 páginasFormacion Practica 02 - Semana 03Ronaldo ChvAún no hay calificaciones
- Bticino - Guía TécnicaDocumento22 páginasBticino - Guía TécnicaBernardo Antonio Ávila AndradeAún no hay calificaciones
- 03 Serie Paralelo Mixto Dc-Rodo2022Documento65 páginas03 Serie Paralelo Mixto Dc-Rodo2022Luis Eduardo Ungaro IAún no hay calificaciones
- Mediciones Eléctricas PDFDocumento16 páginasMediciones Eléctricas PDFLUIS FERNANDO VICTORIA ROJASAún no hay calificaciones
- Clase Trafo 1Documento105 páginasClase Trafo 1Arlington Ademir Horna MegoAún no hay calificaciones
- AsincronoDocumento5 páginasAsincronoSherlockAún no hay calificaciones
- Pratica No. 5 Circuito de Avance RapidoDocumento7 páginasPratica No. 5 Circuito de Avance RapidolinkeeAún no hay calificaciones
- Aa 15 HiDocumento3 páginasAa 15 HiALEJANDRO H. TAPIA SEDANOAún no hay calificaciones
- Instalación de MotorDocumento4 páginasInstalación de MotorFederico MejiaAún no hay calificaciones
- Dimensiona El Contactor y Las Protecciones NecesariasDocumento2 páginasDimensiona El Contactor y Las Protecciones NecesariasIvanAún no hay calificaciones
- Arranque y Variacion de Velocidad en MotoresDocumento39 páginasArranque y Variacion de Velocidad en MotoresChristian Choquehuanca PacoriAún no hay calificaciones
- T 9 Arranque y Control de MotoresDocumento19 páginasT 9 Arranque y Control de Motoresluisitt0 AraezAún no hay calificaciones
- Arranque Demo To ResDocumento3 páginasArranque Demo To Ressatopec100% (1)
- Tipos de Arranque de Un MotorDocumento3 páginasTipos de Arranque de Un Motorelias valentin fernandezAún no hay calificaciones
- BOGIESDocumento44 páginasBOGIESingrid peredaAún no hay calificaciones
- Automatizacion-Con-Contactores-2023_1 (1)Documento49 páginasAutomatizacion-Con-Contactores-2023_1 (1)Jonathan CardenasAún no hay calificaciones
- COMPONENTES Y MATERIALES PARA ARRANQUE DIRECTO (1)Documento2 páginasCOMPONENTES Y MATERIALES PARA ARRANQUE DIRECTO (1)Jonathan CardenasAún no hay calificaciones
- Introducción Material RodanteDocumento33 páginasIntroducción Material Rodanteingrid peredaAún no hay calificaciones
- Diseño Geome Via FerreaDocumento11 páginasDiseño Geome Via FerreaPaulo CesarAún no hay calificaciones
- Solución de FallasDocumento8 páginasSolución de Fallasingrid pereda100% (1)
- Pres TRATAMIENTO DE AIRE ReducidaDocumento52 páginasPres TRATAMIENTO DE AIRE Reducidaingrid peredaAún no hay calificaciones
- 3-2 CALCULOS PARA EL DISENO DE CIRC ALIMENT EN UNA IE COMERCIAL (1)Documento29 páginas3-2 CALCULOS PARA EL DISENO DE CIRC ALIMENT EN UNA IE COMERCIAL (1)Jonathan CardenasAún no hay calificaciones
- Manual LogoDocumento270 páginasManual LogoBlancheroAún no hay calificaciones
- P_36558.htmlDocumento6 páginasP_36558.htmlJonathan CardenasAún no hay calificaciones
- Factor de PotenciaDocumento8 páginasFactor de PotenciaGilmar UlloaAún no hay calificaciones
- ESPECIFICACIONES HIDRONEUMATICODocumento10 páginasESPECIFICACIONES HIDRONEUMATICOJonathan CardenasAún no hay calificaciones
- 1675789665967_ESQUEMAS Y PLANOS DE INSTALACION EN ELECTRICIDAS RESIDENCIALDocumento20 páginas1675789665967_ESQUEMAS Y PLANOS DE INSTALACION EN ELECTRICIDAS RESIDENCIALJonathan CardenasAún no hay calificaciones
- RM 39-2016-MTC01.02Documento2 páginasRM 39-2016-MTC01.02Jonathan CardenasAún no hay calificaciones
- TRIPTICO INFORMATIVO DE CATENARIA N° 1Documento3 páginasTRIPTICO INFORMATIVO DE CATENARIA N° 1Jonathan CardenasAún no hay calificaciones
- Planos_PDFDocumento4 páginasPlanos_PDFJonathan CardenasAún no hay calificaciones
- Primera Discusión Anteproyecto Ley Animales de CompañiaDocumento15 páginasPrimera Discusión Anteproyecto Ley Animales de CompañiaJonathan CardenasAún no hay calificaciones
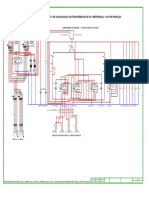
- Plano de Sistemas de Bombeo de Drenaje y Aguas Negras Con Transferencias y Un Rele de Control de TransferenciasDocumento1 páginaPlano de Sistemas de Bombeo de Drenaje y Aguas Negras Con Transferencias y Un Rele de Control de TransferenciasJonathan CardenasAún no hay calificaciones
- Plan Nacional de DESARROLLO FERROVIARIO PDFDocumento150 páginasPlan Nacional de DESARROLLO FERROVIARIO PDFAndréRafaelVelardeAún no hay calificaciones
- EL-ASESINATO-DE-HIRAM-ABIFFDocumento4 páginasEL-ASESINATO-DE-HIRAM-ABIFFJonathan CardenasAún no hay calificaciones
- 3.-ZONAS ELECTRICAS DE PATIO MANIOBRAS BAYOVAR - COLORDocumento1 página3.-ZONAS ELECTRICAS DE PATIO MANIOBRAS BAYOVAR - COLORJonathan CardenasAún no hay calificaciones
- Certificado de Fundamentos de Diseños en AutocadDocumento1 páginaCertificado de Fundamentos de Diseños en AutocadJonathan CardenasAún no hay calificaciones
- Práctica. 5 Avance (Pendientes 19) AxeDocumento71 páginasPráctica. 5 Avance (Pendientes 19) AxeBasura RegistrosAún no hay calificaciones
- Rectificadores de Onda Completa y MediaDocumento14 páginasRectificadores de Onda Completa y Medialitos_plusAún no hay calificaciones
- Electrónica de PotenciaDocumento25 páginasElectrónica de PotenciaHector Vallejos100% (1)
- Transformación trifásica: conexiones delta-delta, estrella-estrella, delta-estrella y estrella-deltaDocumento9 páginasTransformación trifásica: conexiones delta-delta, estrella-estrella, delta-estrella y estrella-deltaChristian j.Aún no hay calificaciones
- Puente de Wheatstone Y Conexión Estrella TrianguloDocumento5 páginasPuente de Wheatstone Y Conexión Estrella TrianguloMarco AntonAún no hay calificaciones
- 2022 Fuente Lineal CorregidoDocumento23 páginas2022 Fuente Lineal CorregidojuanAún no hay calificaciones
- Rotating Electrics 2021Documento332 páginasRotating Electrics 2021Juan Carlos Abreu PalomeraAún no hay calificaciones
- Práctico Electrotecnia 6toDocumento2 páginasPráctico Electrotecnia 6toRaul NegreiraAún no hay calificaciones
- Tr1 Gonzales.r.oDocumento15 páginasTr1 Gonzales.r.oomar daniel gonzales ramosAún no hay calificaciones
- Inversores o Cicloconvertidores CD - CADocumento16 páginasInversores o Cicloconvertidores CD - CAEmanuel AguirreAún no hay calificaciones
- Presentation 1Documento27 páginasPresentation 1Luis ColmenarezAún no hay calificaciones
- Lista de Precios Lorena-2Documento51 páginasLista de Precios Lorena-2Rodrigo MartinezAún no hay calificaciones
- Compartimiento eléctrico baja tensión transformador pedestalDocumento1 páginaCompartimiento eléctrico baja tensión transformador pedestalFabio Alexander Torres AmayaAún no hay calificaciones
- Balasto eléctrico: definición y tiposDocumento22 páginasBalasto eléctrico: definición y tiposRamiroAún no hay calificaciones
- Acta de Inspección y PruebasDocumento4 páginasActa de Inspección y PruebasLU MafaAún no hay calificaciones
- Certificado de Revision Anual en Local de Publica ConcurrenciaDocumento8 páginasCertificado de Revision Anual en Local de Publica ConcurrenciaCarlosAún no hay calificaciones
- Informe 5Documento11 páginasInforme 5Evelin CatucuambaAún no hay calificaciones
- Valores Siemens Baterias Orange PDFDocumento21 páginasValores Siemens Baterias Orange PDFAngel David Osorio RiveroAún no hay calificaciones
- Caracteristicas Del Motor de Corriente ContinuaDocumento19 páginasCaracteristicas Del Motor de Corriente ContinuaYamango CiudadAún no hay calificaciones
- Mi Resumen de Estudio Del Temporizador 555Documento6 páginasMi Resumen de Estudio Del Temporizador 555Guayo PreciosoAún no hay calificaciones
- Laboratorio 1Documento10 páginasLaboratorio 1Juan carlos Aguilar choqueAún no hay calificaciones
- Fuente Elevadora ConmutadoraDocumento5 páginasFuente Elevadora ConmutadoraSebastian RodriguezAún no hay calificaciones
- Control de Velocidad en Motores de Induccion MonofasicosDocumento39 páginasControl de Velocidad en Motores de Induccion MonofasicosKikeyDany Cordova Romo100% (3)
- Lectura 2 - Logica Cableada - Esquemas ElectricosDocumento130 páginasLectura 2 - Logica Cableada - Esquemas ElectricosduvanAún no hay calificaciones
- Simbolos Valvulas ElectronicasDocumento4 páginasSimbolos Valvulas ElectronicasContolb SangAún no hay calificaciones
- Ejercicios Y Simulaciones TAREA 4-10 Electrónica de PotenciaDocumento28 páginasEjercicios Y Simulaciones TAREA 4-10 Electrónica de PotenciaBrian PeñafortAún no hay calificaciones
- Arranque de Motores Monofásicos de 3HPDocumento21 páginasArranque de Motores Monofásicos de 3HPasc9980% (5)
- Proyecto de Medidas Electricas IIDocumento5 páginasProyecto de Medidas Electricas IIJorge Luis Camacho FalconAún no hay calificaciones