También podría gustarte
- Servicios en plataforma: Estrategias regulatoriasDe EverandServicios en plataforma: Estrategias regulatoriasAún no hay calificaciones
- Fundamentos para una Teoría General de los DeberesDe EverandFundamentos para una Teoría General de los DeberesAún no hay calificaciones
- Ut FSMDocumento91 páginasUt FSMSeba'Alejandro VidalAún no hay calificaciones
- Condiciones laborales estibadores HuancayoDocumento38 páginasCondiciones laborales estibadores HuancayoRosy Toralva CAún no hay calificaciones
- Tesis Analisis de Riesgo ExoequeletoDocumento111 páginasTesis Analisis de Riesgo ExoequeletoCeci CarrAún no hay calificaciones
- 01 AEEC 04 RC M4 v2Documento13 páginas01 AEEC 04 RC M4 v2gamerdrareg20Aún no hay calificaciones
- Plan de marketing para estaciones de servicio GamarraDocumento174 páginasPlan de marketing para estaciones de servicio GamarraMelissa Fuentes QuispeAún no hay calificaciones
- KATY ROSY TESISpdfDocumento10 páginasKATY ROSY TESISpdfJAntonio HAyvarAún no hay calificaciones
- Cadena Del Aguaymanto DocumentoDocumento96 páginasCadena Del Aguaymanto DocumentoPercy Huauya PabloAún no hay calificaciones
- Análisis de la aplicación de la normatividad en seguridad a través de la evaluación estadística y mejoras a la Norma G050Documento118 páginasAnálisis de la aplicación de la normatividad en seguridad a través de la evaluación estadística y mejoras a la Norma G050Px3922Aún no hay calificaciones
- Informe Final - Realidad AumentadaDocumento97 páginasInforme Final - Realidad AumentadaJuan Campos AlcaláAún no hay calificaciones
- Manual Prácticas FísicaaaDocumento300 páginasManual Prácticas Físicaaauracan 322Aún no hay calificaciones
- Tesis Juan Pablo Diaz Cd1.1Documento88 páginasTesis Juan Pablo Diaz Cd1.1Juan Pablo DiazAún no hay calificaciones
- Proyecto ErgonómiaDocumento118 páginasProyecto ErgonómiaIan RodriguezAún no hay calificaciones
- Análisis de órbita como técnica de diagnóstico en rotor Machinery Fault SimulatorDocumento109 páginasAnálisis de órbita como técnica de diagnóstico en rotor Machinery Fault SimulatorCamilo A TabordaAún no hay calificaciones
- Mantenimiento de Cateter PercutáneoDocumento107 páginasMantenimiento de Cateter PercutáneoGaby MartinezAún no hay calificaciones
- Análisis de estabilidad de taludes en infraestructuras lineales mediante nuevas metodologíasDocumento669 páginasAnálisis de estabilidad de taludes en infraestructuras lineales mediante nuevas metodologíasalonso cameloAún no hay calificaciones
- MINDT030 - 45811999 - T Prado Muro, Angélica Del CarmenDocumento133 páginasMINDT030 - 45811999 - T Prado Muro, Angélica Del CarmenKarenm ShunelyAún no hay calificaciones
- Mantenimiento TallerDocumento119 páginasMantenimiento TallerAntonio Lara MuñozAún no hay calificaciones
- Ejemplo 3Documento141 páginasEjemplo 3José Andrés ConchaAún no hay calificaciones
- Medicion de Productividad y Eficiencia de Los Puertos Regionales Del Perú: Un Enfoque No ParametricoDocumento120 páginasMedicion de Productividad y Eficiencia de Los Puertos Regionales Del Perú: Un Enfoque No ParametricoCIES: Consorcio de Investigación Econimica y SocialAún no hay calificaciones
- Tesis Razonabilidad Proyectos Suma Alzada Obras de Infraestructura VialDocumento159 páginasTesis Razonabilidad Proyectos Suma Alzada Obras de Infraestructura VialAriel GarcíaAún no hay calificaciones
- IAEA - CCC 25 - Programa para La Educación Técnicos en RadioterapiaDocumento75 páginasIAEA - CCC 25 - Programa para La Educación Técnicos en RadioterapiaAndres AracenaAún no hay calificaciones
- Tesis - Doctorado en Ciencias AdministrativasDocumento173 páginasTesis - Doctorado en Ciencias AdministrativasJean Pierre CastilloAún no hay calificaciones
- Ferrocarril Lima-Ica: Estudio de preinversiónDocumento150 páginasFerrocarril Lima-Ica: Estudio de preinversiónANTONIO HILDEBRANDO ÑAUPARI DIAZAún no hay calificaciones
- Estructuras, Calculo Matricial de Teoria y Problemas (Ramon Argüelles, Edit Bellisco) 1Documento98 páginasEstructuras, Calculo Matricial de Teoria y Problemas (Ramon Argüelles, Edit Bellisco) 1strokes142Aún no hay calificaciones
- DEMANDA DE LA QUINUA (Chenopodium Quinoa Willdenow) A NIVEL INDUSTRIALDocumento149 páginasDEMANDA DE LA QUINUA (Chenopodium Quinoa Willdenow) A NIVEL INDUSTRIALロジャー ニクスラウシェAún no hay calificaciones
- Lavanderia EsanDocumento109 páginasLavanderia EsanComercial Comunicate FacilAún no hay calificaciones
- Valoraciones InmobiliariaDocumento402 páginasValoraciones Inmobiliariajoffre javier espinoza sanchezAún no hay calificaciones
- Modelo inventario líneas esperaDocumento26 páginasModelo inventario líneas esperakarla pamela huamani lastarriaAún no hay calificaciones
- Competencia Perfecta - 1Documento386 páginasCompetencia Perfecta - 1Jhon Erick Calcina RamosAún no hay calificaciones
- Morales - RJ RCMM TESISDocumento195 páginasMorales - RJ RCMM TESISEfrain Parra QuispeAún no hay calificaciones
- Arana Tello Jose - PROYECTODocumento97 páginasArana Tello Jose - PROYECTODanny Edward VegaAún no hay calificaciones
- Proyecto Grado Richard 2020Documento171 páginasProyecto Grado Richard 2020Ck RodAún no hay calificaciones
- Doctorado FINAL TOTALDocumento189 páginasDoctorado FINAL TOTALNora NHAún no hay calificaciones
- Universidad Nacional de PiuraDocumento4 páginasUniversidad Nacional de Piuralenin smith dominguez dominguezAún no hay calificaciones
- Control I - (Opcion - 2)Documento24 páginasControl I - (Opcion - 2)HuyThaiAún no hay calificaciones
- Tesis Chancadora PDFDocumento112 páginasTesis Chancadora PDFcarlos sanabria ninmango50% (2)
- Facultad de Ciencias Empresariales: Escuela Académico Profesional de AdministraciónDocumento16 páginasFacultad de Ciencias Empresariales: Escuela Académico Profesional de AdministraciónYerry PacoshAún no hay calificaciones
- 5 Manual de Usuario Plx118fDocumento51 páginas5 Manual de Usuario Plx118fjavo599Aún no hay calificaciones
- Tesis GatingDocumento101 páginasTesis GatingArcrije JerezAún no hay calificaciones
- República Bolivariana de VenezuelaDocumento81 páginasRepública Bolivariana de VenezuelaEduardo Rodriguez100% (1)
- Transformadores de PotenciaDocumento41 páginasTransformadores de PotenciaeddieyAún no hay calificaciones
- Valeriano - Propuesta Mejora LineaDocumento103 páginasValeriano - Propuesta Mejora LineaKevin David Ortega QuinonesAún no hay calificaciones
- Gorbalan Perez FernandoDocumento84 páginasGorbalan Perez FernandoGustavo ConradoAún no hay calificaciones
- Da Proceso 20-15-10452152 244001022 70890842 PDFDocumento55 páginasDa Proceso 20-15-10452152 244001022 70890842 PDFJose Agustín Parodi MartinezAún no hay calificaciones
- IEzosajaDocumento221 páginasIEzosajaGiancarlos OliveraAún no hay calificaciones
- Curso ServomotoresDocumento98 páginasCurso ServomotoresÁlvaro LopesanzAún no hay calificaciones
- Cuaderno de Hombre Araña PDFDocumento222 páginasCuaderno de Hombre Araña PDFRoger Danilo Lujan ArmasAún no hay calificaciones
- Precio de Acciones - Tesis PDFDocumento158 páginasPrecio de Acciones - Tesis PDFjaime yelsin rosales malpartidaAún no hay calificaciones
- Matriz de identificación y valoración de riesgosDocumento13 páginasMatriz de identificación y valoración de riesgosJulian Obando OrdoñezAún no hay calificaciones
- Salvada de Christian Diosito Te QuiereDocumento94 páginasSalvada de Christian Diosito Te QuiereAmbanny CatalánAún no hay calificaciones
- 3 Articulo Rol de EnfermeriaDocumento80 páginas3 Articulo Rol de EnfermeriaJessica paolaAún no hay calificaciones
- Hijar CJDocumento100 páginasHijar CJNelson VizcarraAún no hay calificaciones
- UTILIZACION DE LA, Energia de Armonicas T.621.3.A61 PDFDocumento104 páginasUTILIZACION DE LA, Energia de Armonicas T.621.3.A61 PDFpaola medina100% (1)
- (Ex) Une en - 1005 5 2007Documento5 páginas(Ex) Une en - 1005 5 2007Gonzalo AldazAún no hay calificaciones
- Modelo Proyecto de InvestigacionDocumento68 páginasModelo Proyecto de InvestigacionGRADOS LEON CARLOS JESUSAún no hay calificaciones
- Corporación Andina de Fomento, Caf. The Nature Conservancy, TNCDocumento152 páginasCorporación Andina de Fomento, Caf. The Nature Conservancy, TNCCarlos Humberto Zambrano Escamilla100% (1)
- Principios de Derecho regulatorio: Sectores económicos de interés general y regulación de riesgosDe EverandPrincipios de Derecho regulatorio: Sectores económicos de interés general y regulación de riesgosCalificación: 3 de 5 estrellas3/5 (1)
- Practica Calificada T1 Emprendimiento y Evaluación de Proyectos UPN 2023 - IIDocumento11 páginasPractica Calificada T1 Emprendimiento y Evaluación de Proyectos UPN 2023 - IIPrimus 2018Aún no hay calificaciones
- Practica Calificada T1 Control de Procesos Industriales UPN 2023 - IIDocumento6 páginasPractica Calificada T1 Control de Procesos Industriales UPN 2023 - IIPrimus 2018Aún no hay calificaciones
- Parcial Robótica 2 UPN 2023 - IIDocumento8 páginasParcial Robótica 2 UPN 2023 - IIPrimus 2018Aún no hay calificaciones
- Practica Calificada T2 Emprendimiento y Evaluación de Proyectos UPN 2023 - IIDocumento7 páginasPractica Calificada T2 Emprendimiento y Evaluación de Proyectos UPN 2023 - IIPrimus 2018Aún no hay calificaciones
- Práctica Calificada T2 Robótica 2 UPN 2023 - IIDocumento27 páginasPráctica Calificada T2 Robótica 2 UPN 2023 - IIPrimus 2018Aún no hay calificaciones
- Desarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NorteDocumento9 páginasDesarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NortePrimus 2018Aún no hay calificaciones
- Desarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NorteDocumento9 páginasDesarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NortePrimus 2018Aún no hay calificaciones
- Implementación de Un Sistema Domótico e IA Con Wifi para La Seguridad de Las ViviendasDocumento19 páginasImplementación de Un Sistema Domótico e IA Con Wifi para La Seguridad de Las ViviendasPrimus 2018Aún no hay calificaciones
- Instrumentación Inteligente en Una Planta de Tratamiento de Aguas Residuales - UPN Control de Procesos Industriales UPNDocumento7 páginasInstrumentación Inteligente en Una Planta de Tratamiento de Aguas Residuales - UPN Control de Procesos Industriales UPNPrimus 2018Aún no hay calificaciones
- Desarrollo de Un Robot Móvil Con Brazo Robótico para La Gestión de Desastres Naturales en El PerúDocumento25 páginasDesarrollo de Un Robot Móvil Con Brazo Robótico para La Gestión de Desastres Naturales en El PerúPrimus 2018Aún no hay calificaciones
- Desarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NorteDocumento21 páginasDesarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NortePrimus 2018Aún no hay calificaciones
- Integración y Optimización de Un Brazo Robótico de Bajo Costo en Procedimiento de Cirugía Asistida en El PerúDocumento38 páginasIntegración y Optimización de Un Brazo Robótico de Bajo Costo en Procedimiento de Cirugía Asistida en El PerúPrimus 2018Aún no hay calificaciones
- Práctica de Campo N°02 Electrohidráulica y Electroneumática UPNDocumento9 páginasPráctica de Campo N°02 Electrohidráulica y Electroneumática UPNPrimus 2018Aún no hay calificaciones
- Desarrollo de Un Robot Móvil Con Brazo Robótico para La Gestión de Desatres Naturales en El PerúDocumento19 páginasDesarrollo de Un Robot Móvil Con Brazo Robótico para La Gestión de Desatres Naturales en El PerúPrimus 2018Aún no hay calificaciones
- Informe Final - Practicas Preprofesionales UPNDocumento23 páginasInforme Final - Practicas Preprofesionales UPNPrimus 2018100% (1)
- Implementación de Un Sistema Domótico e IA Con Wifi para La Seguridad de Las Viviendas - Paper T2Documento6 páginasImplementación de Un Sistema Domótico e IA Con Wifi para La Seguridad de Las Viviendas - Paper T2Primus 2018Aún no hay calificaciones
- Instrumentación Inteligente en Una Planta de Tratamiento de Aguas Residuales - UPN Control de Procesos Industriales UPNDocumento7 páginasInstrumentación Inteligente en Una Planta de Tratamiento de Aguas Residuales - UPN Control de Procesos Industriales UPNPrimus 2018Aún no hay calificaciones
- Reporte de Laboratorio de Circuito RC UPNDocumento5 páginasReporte de Laboratorio de Circuito RC UPNPrimus 2018Aún no hay calificaciones
- Laboratorio 4 Motor CC Robótica UPNDocumento5 páginasLaboratorio 4 Motor CC Robótica UPNPrimus 2018Aún no hay calificaciones
- Práctica de Campo N°01 Electrohidráulica y Electroneumática UPNDocumento5 páginasPráctica de Campo N°01 Electrohidráulica y Electroneumática UPNPrimus 2018Aún no hay calificaciones
- Facultad de IngenieríaDocumento19 páginasFacultad de IngenieríaPrimus 2018Aún no hay calificaciones
- Reporte de Laboratorio de Medición de Resistencias UPNDocumento3 páginasReporte de Laboratorio de Medición de Resistencias UPNPrimus 2018Aún no hay calificaciones
- Laboratorio 5 Arduino Motor DC Robótica UPNDocumento8 páginasLaboratorio 5 Arduino Motor DC Robótica UPNPrimus 2018Aún no hay calificaciones
- Laboratorio N°13 Física 2 UPNDocumento2 páginasLaboratorio N°13 Física 2 UPNPrimus 2018Aún no hay calificaciones
- Reporte de Laboratorio de Leyes de Kirchhoff UPNDocumento3 páginasReporte de Laboratorio de Leyes de Kirchhoff UPNPrimus 2018Aún no hay calificaciones
- Reporte de Laboratorio de Condensadores UPNDocumento3 páginasReporte de Laboratorio de Condensadores UPNPrimus 2018Aún no hay calificaciones
- Laboratorio N°11 Física 2 UPNDocumento3 páginasLaboratorio N°11 Física 2 UPNPrimus 2018Aún no hay calificaciones
- Reporte de Laboratorio de Líneas Equipotenciales UPNDocumento3 páginasReporte de Laboratorio de Líneas Equipotenciales UPNPrimus 2018Aún no hay calificaciones
- Reporte de Laboratorio de Campo Eléctrico Física 3 UPNDocumento3 páginasReporte de Laboratorio de Campo Eléctrico Física 3 UPNPrimus 2018Aún no hay calificaciones
- UNIDAD 2.1. - Programacion LinealDocumento107 páginasUNIDAD 2.1. - Programacion LinealWilson AdrianoAún no hay calificaciones
- Clase 9 - Máx y Mín CondicionadosDocumento15 páginasClase 9 - Máx y Mín CondicionadosbubbaAún no hay calificaciones
- Economia Empresarial 13Documento46 páginasEconomia Empresarial 13Joose HuayanayAún no hay calificaciones
- Busqueda InformadaDocumento5 páginasBusqueda InformadaJOSE MANUEL COLOP PEREZAún no hay calificaciones
- Actividad 4. Análisis de CasoDocumento6 páginasActividad 4. Análisis de CasoEdgardo Debayle100% (1)
- Iind 2103 Principos de Optimizacion 2018 20Documento6 páginasIind 2103 Principos de Optimizacion 2018 20Nicolas Simmonds SamperAún no hay calificaciones
- Bomba de Aire Mecánica A PedalDocumento21 páginasBomba de Aire Mecánica A PedalChristopher BirrerAún no hay calificaciones
- Libro Investigacion de Operaciones Samuel Hidalgo Documento Final y Libro CompletoDocumento447 páginasLibro Investigacion de Operaciones Samuel Hidalgo Documento Final y Libro Completojona riveraAún no hay calificaciones
- Ejercicios de Investigacion de Operaciones Aplicando Metodo SimplexDocumento5 páginasEjercicios de Investigacion de Operaciones Aplicando Metodo SimplexGeraldAún no hay calificaciones
- PaduaDuenas AndreaKatheryne 2018 PDFDocumento94 páginasPaduaDuenas AndreaKatheryne 2018 PDFrodrigo_leonzAún no hay calificaciones
- Unidad 1 (2018) AlumniiDocumento61 páginasUnidad 1 (2018) AlumniiDavid TorresAún no hay calificaciones
- Evolucion de Los Compiladores y Ciencia para ConstruirlosDocumento18 páginasEvolucion de Los Compiladores y Ciencia para ConstruirlosVioleta Hernandez100% (1)
- 03.cree Su Propio Robot de Trading en 6 PasosDocumento18 páginas03.cree Su Propio Robot de Trading en 6 PasosEnrique BlancoAún no hay calificaciones
- Modelos matemáticos hortalizasDocumento12 páginasModelos matemáticos hortalizasAlf Lop ManzAún no hay calificaciones
- Atlantic Flooring Company: Optimal production mix maximizes profitsDocumento28 páginasAtlantic Flooring Company: Optimal production mix maximizes profitsvaleria castro cifuentes100% (1)
- Uni VariablesDocumento6 páginasUni VariablesHeriberto Leon CastilloAún no hay calificaciones
- Equipo 3 Unidad 3 Mod. Opt. de Rec.Documento28 páginasEquipo 3 Unidad 3 Mod. Opt. de Rec.ISIDRO RENÉ CONTRERAS DEL VALLEAún no hay calificaciones
- Metodo VogelDocumento14 páginasMetodo Vogelalvis64100% (1)
- Aplicacion de La Geotecnia en La Optimizacion de Proyectos de Explotacion A Rajo Abierto - 271020 - Manuel RapimanDocumento43 páginasAplicacion de La Geotecnia en La Optimizacion de Proyectos de Explotacion A Rajo Abierto - 271020 - Manuel RapimanDaniel Velásquez IparraguirreAún no hay calificaciones
- Cálculo Diferencial Taller Eje 4Documento3 páginasCálculo Diferencial Taller Eje 4Pablo Piedrahíta RamírezAún no hay calificaciones
- Solución ParcialDocumento5 páginasSolución ParcialKatherine Andrea MuñozAún no hay calificaciones
- Método de Lagrange para optimización con restriccionesDocumento7 páginasMétodo de Lagrange para optimización con restriccionesEduardo SánchezAún no hay calificaciones
- Evidencia 2Documento16 páginasEvidencia 2José Pablo López AguilarAún no hay calificaciones
- Taller Metodo Simplex - PROGRAMACIONDocumento12 páginasTaller Metodo Simplex - PROGRAMACIONELIS JOHANA FONSECA MONTESAún no hay calificaciones
- Modelos de transporte y transbordoDocumento16 páginasModelos de transporte y transbordoHOOVER VERGARAAún no hay calificaciones
- Aplicaciones de La Investigación de Operaciones en La IndustriaDocumento4 páginasAplicaciones de La Investigación de Operaciones en La IndustriaAnyk93Aún no hay calificaciones
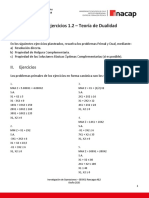
- Ejercicios de Teoría de Dualidad en Problemas de Programación LinealDocumento3 páginasEjercicios de Teoría de Dualidad en Problemas de Programación LinealjuanAún no hay calificaciones
- IOARR IEP ChajanaDocumento28 páginasIOARR IEP ChajanaMartines Mts QCAún no hay calificaciones
- Ficha de ProyectosDocumento6 páginasFicha de ProyectosJULIA ELENA GUTIERREZ GOMEZAún no hay calificaciones