También podría gustarte
- Calculo Vectorial, Inv 2Documento15 páginasCalculo Vectorial, Inv 2Litzy Del AngelAún no hay calificaciones
- Curso Dibujo Tecnico NormalizadoDocumento95 páginasCurso Dibujo Tecnico NormalizadoGABRIEL PUENTE SANTOSAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Calculo Vectorial Unidad 2Documento30 páginasCalculo Vectorial Unidad 2LUZ PEREZ100% (4)
- Parametrizacion de CurvasDocumento31 páginasParametrizacion de CurvasOscar U.RAún no hay calificaciones
- Manual Curvas Planas, ParametricasDocumento38 páginasManual Curvas Planas, ParametricasLitzy Donaghi Castillo PérezAún no hay calificaciones
- El Ingeniero y El Dibujo Electromecanico 2Documento5 páginasEl Ingeniero y El Dibujo Electromecanico 2JOSELYN CHIPOL SINACA100% (1)
- Conocimiento Previos A IrracionalesDocumento1 páginaConocimiento Previos A IrracionalesLUCIAAún no hay calificaciones
- Curvas Parametricas y PolaresDocumento7 páginasCurvas Parametricas y PolaresDavid MeroAún no hay calificaciones
- 1.1 Ecuaciones ParamétricasDocumento10 páginas1.1 Ecuaciones ParamétricasStalin Paul Rodriguez Leon100% (1)
- Curvas en R2 y Ecuaciones ParamétricasDocumento21 páginasCurvas en R2 y Ecuaciones ParamétricasAby Valenzuela100% (1)
- Método PertDocumento35 páginasMétodo PertAngela Esteban LlanosAún no hay calificaciones
- EstequiometriaDocumento17 páginasEstequiometriaDONALDO RODRIGUEZ PEINADO100% (2)
- Power Point Curvas y Derivadas Paramétricas (Autoguardado)Documento11 páginasPower Point Curvas y Derivadas Paramétricas (Autoguardado)georgeuni2013Aún no hay calificaciones
- Chipol Sinaca Joselyn-U2-CvDocumento23 páginasChipol Sinaca Joselyn-U2-CvChipol JoselynAún no hay calificaciones
- Unidad II, Matematicas IIIDocumento18 páginasUnidad II, Matematicas IIIDaniel CBAún no hay calificaciones
- UNIDAD 2 Calculo VectorialDocumento13 páginasUNIDAD 2 Calculo VectorialLeonel Tránsito MondragónAún no hay calificaciones
- Investigación Unidad 2Documento7 páginasInvestigación Unidad 2Itza Coloriano RojasAún no hay calificaciones
- Curvas ParametricasDocumento18 páginasCurvas ParametricasLuceroM.OlivaresAún no hay calificaciones
- Avance Producto Mate II-2daDocumento37 páginasAvance Producto Mate II-2daAlfonso Jesús Marlo ElíasAún no hay calificaciones
- Trabajo Final de Matemáticas FinalizadoDocumento18 páginasTrabajo Final de Matemáticas FinalizadoIsrael Arzate MartínezAún no hay calificaciones
- Funciones Vectoriales de Una Variable RealDocumento25 páginasFunciones Vectoriales de Una Variable RealVrs SerranoAún no hay calificaciones
- AndyDocumento20 páginasAndyedwiin fdzAún no hay calificaciones
- Ecuaciones Parametricas Curvas Planas LGDocumento19 páginasEcuaciones Parametricas Curvas Planas LGedisonAún no hay calificaciones
- G.Guzman - IMA - 3B - Actividad 4 - Ecuaciones ParamétricasDocumento9 páginasG.Guzman - IMA - 3B - Actividad 4 - Ecuaciones ParamétricasjulioAún no hay calificaciones
- Wa0006Documento13 páginasWa0006221u0736Aún no hay calificaciones
- Formulario Unidad 2 Calculo VecDocumento6 páginasFormulario Unidad 2 Calculo VecElizabethAún no hay calificaciones
- Investigacion Unidad 2 Hipolito Sanchez YonatanDocumento12 páginasInvestigacion Unidad 2 Hipolito Sanchez YonatanJonathan Hipólito sanchezAún no hay calificaciones
- Trabajo FinalDocumento20 páginasTrabajo FinalAlan SalasAún no hay calificaciones
- UnidadDocumento47 páginasUnidadLiizz HervertAún no hay calificaciones
- Derivada en Forma Paramétrica y PolarDocumento10 páginasDerivada en Forma Paramétrica y PolarVicente AltamiranoAún no hay calificaciones
- Ecuaciones Paramétricas y Curvas Planas, Longitud de Arco de Una Curva PlanaDocumento6 páginasEcuaciones Paramétricas y Curvas Planas, Longitud de Arco de Una Curva PlanaJavier VillegasAún no hay calificaciones
- Presentacin Clase 1Documento10 páginasPresentacin Clase 1SushAún no hay calificaciones
- Unidad2 IAFR 20310350 3C 01102021Documento48 páginasUnidad2 IAFR 20310350 3C 01102021Ivan FloresAún no hay calificaciones
- Capítulo Vii - Integrales de Línea Definitivo 2020Documento23 páginasCapítulo Vii - Integrales de Línea Definitivo 2020RenzoCoiriniAún no hay calificaciones
- PPT11 Curvas Paramétricas 2Documento38 páginasPPT11 Curvas Paramétricas 2Frank MillerAún no hay calificaciones
- Calculo Integral 2023 - JhenerDocumento10 páginasCalculo Integral 2023 - JhenerJhener White PovedaAún no hay calificaciones
- Activarlo en CMDDocumento9 páginasActivarlo en CMDGregorio HernandezAún no hay calificaciones
- Práctica 2. Ecuaciones Paramétricas y Coordenadas Polares 2Documento10 páginasPráctica 2. Ecuaciones Paramétricas y Coordenadas Polares 2Brandom Monroy CarbajalAún no hay calificaciones
- Ecuaciones Parametricas Investigacion BreveDocumento3 páginasEcuaciones Parametricas Investigacion BreveBrandom Monroy CarbajalAún no hay calificaciones
- Lyx GeorgeDocumento42 páginasLyx GeorgeGeorge Contreras HernandezAún no hay calificaciones
- U2 M03 T01 (Ecs Parametricas)Documento5 páginasU2 M03 T01 (Ecs Parametricas)Luis Anthony Cadillo HuamanAún no hay calificaciones
- Unidad 2 - Curvas Planas, Ecuaciones Paramétricas y Coordenadas PolaresDocumento11 páginasUnidad 2 - Curvas Planas, Ecuaciones Paramétricas y Coordenadas PolaresLeonel Tránsito MondragónAún no hay calificaciones
- Guia 5 Recta-CircunferenciaDocumento13 páginasGuia 5 Recta-CircunferenciaRonald Chipa AybarAún no hay calificaciones
- Practica N 2 FisicaDocumento10 páginasPractica N 2 FisicaIan Daryll Pinedo GonzalesAún no hay calificaciones
- Clase 3 - Integrales LinealesDocumento13 páginasClase 3 - Integrales LinealesrichardferAún no hay calificaciones
- Evidencia de Desempeño 4Documento17 páginasEvidencia de Desempeño 4Cristobal Elias Escandon EscobarAún no hay calificaciones
- VBE - 06 Funciones Vectoriales PDFDocumento59 páginasVBE - 06 Funciones Vectoriales PDFmauro_022Aún no hay calificaciones
- En La MatemáticaDocumento5 páginasEn La MatemáticaRonald Gamarra SalinasAún no hay calificaciones
- Rectas y ConicasDocumento69 páginasRectas y Conicasddcravotta100% (2)
- Proyecto de Calculo de Varias VariablesDocumento22 páginasProyecto de Calculo de Varias VariablesEduardo SincheAún no hay calificaciones
- Curvas Parametricas y Funciones Parametricas de Un ParametroDocumento20 páginasCurvas Parametricas y Funciones Parametricas de Un ParametroIvanAún no hay calificaciones
- Parametrizacion PDFDocumento30 páginasParametrizacion PDFValentina EspinozaAún no hay calificaciones
- 1.-Funciones Vectoriales PDFDocumento30 páginas1.-Funciones Vectoriales PDFCésar MarinAún no hay calificaciones
- Calculo VectorialDocumento48 páginasCalculo VectorialErick Nicolas Roque RomeroAún no hay calificaciones
- Aplicaciones Geométricas de La Integral DefinidaDocumento11 páginasAplicaciones Geométricas de La Integral DefinidaTony Gave VizurragaAún no hay calificaciones
- Tarea 8Documento11 páginasTarea 8Jesus YbarraAún no hay calificaciones
- Unidad 2 VectorialDocumento9 páginasUnidad 2 VectorialMarilu BautistaAún no hay calificaciones
- Curvasparametricas PDFDocumento7 páginasCurvasparametricas PDFcrisAún no hay calificaciones
- DerivadasDocumento115 páginasDerivadasJavier Saldarriaga HerreraAún no hay calificaciones
- Manual Calculo Vectorial Unidad 2Documento44 páginasManual Calculo Vectorial Unidad 2George Contreras HernandezAún no hay calificaciones
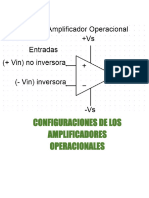
- Configuraciones de Los Amplificadores Operacionales-Joselyn Chipol SinacaDocumento7 páginasConfiguraciones de Los Amplificadores Operacionales-Joselyn Chipol SinacaJOSELYN CHIPOL SINACAAún no hay calificaciones
- Guía de Observación de ExposiciónDocumento2 páginasGuía de Observación de ExposiciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- ,. Bn.Documento1 página,. Bn.JOSELYN CHIPOL SINACAAún no hay calificaciones
- Excel 15 y 17Documento10 páginasExcel 15 y 17JOSELYN CHIPOL SINACAAún no hay calificaciones
- 3.3. - Ley de La Conservacion de La MasaDocumento8 páginas3.3. - Ley de La Conservacion de La MasaJOSELYN CHIPOL SINACAAún no hay calificaciones
- Lista de Cotejo Investigacion Documental U-4Documento2 páginasLista de Cotejo Investigacion Documental U-4JOSELYN CHIPOL SINACAAún no hay calificaciones
- Humanidades Vape 15 y 17Documento2 páginasHumanidades Vape 15 y 17JOSELYN CHIPOL SINACAAún no hay calificaciones
- NandoDocumento2 páginasNandoJOSELYN CHIPOL SINACAAún no hay calificaciones
- Demand ADocumento1 páginaDemand AJOSELYN CHIPOL SINACAAún no hay calificaciones
- Campaña Contra El Uso de Vapeadores - 05,15, 33, 34 y 37Documento3 páginasCampaña Contra El Uso de Vapeadores - 05,15, 33, 34 y 37JOSELYN CHIPOL SINACAAún no hay calificaciones
- Lista 1 eDocumento2 páginasLista 1 eJOSELYN CHIPOL SINACAAún no hay calificaciones
- Investigación MetrologíaDocumento4 páginasInvestigación MetrologíaJOSELYN CHIPOL SINACAAún no hay calificaciones
- Practica 6 Unidad 4Documento5 páginasPractica 6 Unidad 4JOSELYN CHIPOL SINACAAún no hay calificaciones
- Ubicación de La Materia en El Modulo de CostesDocumento2 páginasUbicación de La Materia en El Modulo de CostesJOSELYN CHIPOL SINACAAún no hay calificaciones
- Representaciones de Tolerancias Geométricas de La Forma y Las de PosiciónDocumento5 páginasRepresentaciones de Tolerancias Geométricas de La Forma y Las de PosiciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- INTRODUCCIÓNDocumento4 páginasINTRODUCCIÓNJOSELYN CHIPOL SINACAAún no hay calificaciones
- DibujoDocumento3 páginasDibujoJOSELYN CHIPOL SINACAAún no hay calificaciones
- Representación de Los Ajustes y Reglas de AcotacionDocumento4 páginasRepresentación de Los Ajustes y Reglas de AcotacionJOSELYN CHIPOL SINACAAún no hay calificaciones
- Acotación de Formas Geométricas y de FabricaciónDocumento18 páginasAcotación de Formas Geométricas y de FabricaciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- Wa0001Documento4 páginasWa0001JOSELYN CHIPOL SINACAAún no hay calificaciones
- Introducción A Máquinas y MecanismosDocumento6 páginasIntroducción A Máquinas y MecanismoschiiablackcatAún no hay calificaciones
- Decimales en La Vida Cotidiana - 13 de NoviembreDocumento7 páginasDecimales en La Vida Cotidiana - 13 de NoviembreJJ BejaranoAún no hay calificaciones
- Fluidos Eia Edu Co Hidraulica Articuloses Flujoencanales Flu PDFDocumento12 páginasFluidos Eia Edu Co Hidraulica Articuloses Flujoencanales Flu PDFsoto_133Aún no hay calificaciones
- Regresión y Clustering Con PythonDocumento23 páginasRegresión y Clustering Con PythonMario Ruano FernándezAún no hay calificaciones
- Ejercicios de SesiónDocumento5 páginasEjercicios de SesiónSantiago Carballo SánchezAún no hay calificaciones
- Estadistica 1Documento7 páginasEstadistica 1Paul Lopez FloresAún no hay calificaciones
- Polinomios EspecialesDocumento4 páginasPolinomios Especialesmarcos elvoAún no hay calificaciones
- ECUACIONESDocumento12 páginasECUACIONESMisael Moisés Meza RodríguezAún no hay calificaciones
- Proceso de CobrizadoDocumento3 páginasProceso de Cobrizadocmlc2Aún no hay calificaciones
- Efecto Del Esfuerzo Cortante en La Energía de Deformación de Una Viga.Documento4 páginasEfecto Del Esfuerzo Cortante en La Energía de Deformación de Una Viga.Juan David Zapata OliverosAún no hay calificaciones
- Suicidio CuánticoDocumento2 páginasSuicidio CuánticoGonzaloMeratAún no hay calificaciones
- Lunes Mate MCDDocumento6 páginasLunes Mate MCDDario Alvarez CubaAún no hay calificaciones
- Administracion y MercadotecniaDocumento8 páginasAdministracion y MercadotecniaVicky Ramirez100% (1)
- Recta en El Plano - 2020Documento27 páginasRecta en El Plano - 2020Fabricio Nicolas ReiaAún no hay calificaciones
- Leyes Del VentiladorDocumento13 páginasLeyes Del VentiladorLili Zapana VelásquezAún no hay calificaciones
- Ejercicios Sobre Ecuaciones de Las Rectas Tangentes y NormalesDocumento4 páginasEjercicios Sobre Ecuaciones de Las Rectas Tangentes y NormalesMatías Romero ArmasAún no hay calificaciones
- Conversiones de Sistemas Numéricos y Producto en Octal y HexadecimalDocumento5 páginasConversiones de Sistemas Numéricos y Producto en Octal y HexadecimalRed_ShannonAún no hay calificaciones
- CAPITULO 3 PracticasDocumento60 páginasCAPITULO 3 Practicaslilliana cruzAún no hay calificaciones
- Manual para El Diseño de Un Pavimento Por El Metodo ASTHODocumento18 páginasManual para El Diseño de Un Pavimento Por El Metodo ASTHOCalacas JandroAún no hay calificaciones
- Set Números RacionalesDocumento46 páginasSet Números RacionalesAngela Goretti Perdomo MosqueraAún no hay calificaciones
- Cuadrado de Un Binomi0: Producto de Dos Binomios Con Un Termino en ComunDocumento7 páginasCuadrado de Un Binomi0: Producto de Dos Binomios Con Un Termino en Comunrafael.libre2341Aún no hay calificaciones
- Cerchas - Método de Las Secciones HPRDocumento25 páginasCerchas - Método de Las Secciones HPRCoordinadora Slotting Ransa secosAún no hay calificaciones
- DiapositivasDocumento15 páginasDiapositivasMAGOAún no hay calificaciones
- Aplicaciones de La DerivadaDocumento2 páginasAplicaciones de La DerivadaErnesto NegreteAún no hay calificaciones
- Introducción A Los Elementos Finitos: UninorteDocumento45 páginasIntroducción A Los Elementos Finitos: UninorteRonald BarriosAún no hay calificaciones
- Laboratorio Virtual #01 - Teoria de Errores - Medidas Directas - ResueltoDocumento6 páginasLaboratorio Virtual #01 - Teoria de Errores - Medidas Directas - ResueltoErick RengifoAún no hay calificaciones