También podría gustarte
- Stratix 800Documento83 páginasStratix 800norpool1@gmail.comAún no hay calificaciones
- Clase 16Documento22 páginasClase 16Arturo Tadeo Calderón SalazarAún no hay calificaciones
- Solucion Fase 1 Parte Teórica CONTROL DIGITALDocumento13 páginasSolucion Fase 1 Parte Teórica CONTROL DIGITALM cardona100% (4)
- Examen de Quimica UNIDocumento1 páginaExamen de Quimica UNIrolandotomantoAún no hay calificaciones
- Introducción A Los Sistemas Discretos 2013-2Documento12 páginasIntroducción A Los Sistemas Discretos 2013-2diosmarsempunAún no hay calificaciones
- CONTROL DIGITAL Ecuacion Es A DiferenciasDocumento2 páginasCONTROL DIGITAL Ecuacion Es A DiferenciasLuis CardenasAún no hay calificaciones
- Laboratorio 3 - Galdamez, MoralesDocumento4 páginasLaboratorio 3 - Galdamez, MoralesSamuel RodriguezAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Accionamientos Diseño de CombinacionalDocumento23 páginasAccionamientos Diseño de Combinacionalwcano_10Aún no hay calificaciones
- Cerradura Electrónica Codificad1Documento6 páginasCerradura Electrónica Codificad1Marlon Glowing SalasAún no hay calificaciones
- Presentacion PDS 2Documento153 páginasPresentacion PDS 2Manuel ValeriaAún no hay calificaciones
- S11.s1-Representacion de Variables de EstadoDocumento28 páginasS11.s1-Representacion de Variables de EstadoAntonio CamiloagaAún no hay calificaciones
- TEMA8 - Introduccion A Los Sistemas DigitalesDocumento28 páginasTEMA8 - Introduccion A Los Sistemas DigitalesJostinAún no hay calificaciones
- Unidad 1 Control DigitalDocumento13 páginasUnidad 1 Control DigitalEdmundo R. NeriaAún no hay calificaciones
- Controlador Pid Digital Implementado en Una PCDocumento21 páginasControlador Pid Digital Implementado en Una PCJC B HdzAún no hay calificaciones
- Accionamientos Diseño Secuencial 04Documento42 páginasAccionamientos Diseño Secuencial 04wcano_10Aún no hay calificaciones
- Procesamiento Digital de SeñalesDocumento20 páginasProcesamiento Digital de SeñalesElmer RchAún no hay calificaciones
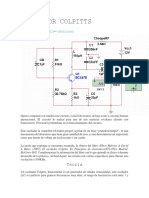
- Oscilador ColpittsDocumento10 páginasOscilador ColpittsaloexanderAún no hay calificaciones
- CircuitosDocumento26 páginasCircuitosmikeuaaAún no hay calificaciones
- Practica 01-Control Digital-2020bDocumento1 páginaPractica 01-Control Digital-2020bFabián MoralesAún no hay calificaciones
- Unidad 1.2 Motores de CCDocumento30 páginasUnidad 1.2 Motores de CCwcano_10Aún no hay calificaciones
- Señales y Sistemas Discretos Ecuaciones en DiferenciasDocumento15 páginasSeñales y Sistemas Discretos Ecuaciones en Diferenciascarlos eduardo guzmanAún no hay calificaciones
- H.villA - Alacranes Del Estado de Sonora.Documento98 páginasH.villA - Alacranes Del Estado de Sonora.hector villaAún no hay calificaciones
- Presentación PDF Circuitos de Primer OrdenDocumento14 páginasPresentación PDF Circuitos de Primer OrdenDaniloMoralesAún no hay calificaciones
- Diseño de Controladores Digitales en El Dominio ZDocumento8 páginasDiseño de Controladores Digitales en El Dominio ZJesús AndrésAún no hay calificaciones
- Proyecto de ControlDocumento20 páginasProyecto de Controlheribert GonzalezAún no hay calificaciones
- Notas Control DigitalDocumento130 páginasNotas Control DigitalZenón Martínez CruzAún no hay calificaciones
- Guía de Uso PID para ArduinoDocumento28 páginasGuía de Uso PID para ArduinoWashington Quevedo100% (1)
- Sistemas de Control en Bucle Abierto y CerradoDocumento25 páginasSistemas de Control en Bucle Abierto y CerradodhmoedanoAún no hay calificaciones
- Capitulo 2Documento41 páginasCapitulo 2Adrian MarquezAún no hay calificaciones
- Aplica Toolkit de Identificación y Control Con LabVIEWDocumento32 páginasAplica Toolkit de Identificación y Control Con LabVIEWRicardo Rodriguez Bustinza100% (1)
- Tema5 NormasBasicasyRecomendacionesenDisenoPCB PDFDocumento20 páginasTema5 NormasBasicasyRecomendacionesenDisenoPCB PDFandrsAún no hay calificaciones
- Tippens Fisica 7e Diapositivas 32aDocumento42 páginasTippens Fisica 7e Diapositivas 32agustagarotoAún no hay calificaciones
- Práctica Adc-Dac Con ArduinoDocumento3 páginasPráctica Adc-Dac Con ArduinoAranguthy CabreraAún no hay calificaciones
- PLC BasicoDocumento21 páginasPLC BasicoRuben ValdiviaAún no hay calificaciones
- Control Digital TemarioDocumento8 páginasControl Digital TemarioRubenLopezAguilarAún no hay calificaciones
- Circuitos de Segundo OrdenDocumento12 páginasCircuitos de Segundo OrdenDaniloMoralesAún no hay calificaciones
- Controladores PID y Controladores PID ModificadosDocumento29 páginasControladores PID y Controladores PID Modificadossandro95Aún no hay calificaciones
- Labview PracticasDocumento37 páginasLabview PracticasManuel ForvAún no hay calificaciones
- Contenido Del CursoDocumento4 páginasContenido Del CursoFranciscoJavierUrietaGarcíaAún no hay calificaciones
- Informe Filtros IirDocumento25 páginasInforme Filtros IirsjimenezAún no hay calificaciones
- Automatización IndustrialDocumento18 páginasAutomatización IndustrialJames KelleyAún no hay calificaciones
- Seales DiscretasDocumento3 páginasSeales DiscretasJhonAún no hay calificaciones
- Digitalizador de VozDocumento13 páginasDigitalizador de Vozjfv_21219735Aún no hay calificaciones
- Acciones Basicas Control Tema10 1 PDFDocumento16 páginasAcciones Basicas Control Tema10 1 PDFeltribologoAún no hay calificaciones
- Resolución EXAMEN FINALDocumento3 páginasResolución EXAMEN FINALOscarinho PereyraAún no hay calificaciones
- Solucion Logica Cableada 2Documento13 páginasSolucion Logica Cableada 2AlexNorbertoUrbanoBolañosAún no hay calificaciones
- Diseño Del Controlador PIDDocumento37 páginasDiseño Del Controlador PIDBilly ElliotAún no hay calificaciones
- Deber 2.1Documento20 páginasDeber 2.1DavidAún no hay calificaciones
- Diseño de Controladores en Espacio de EstadosDocumento8 páginasDiseño de Controladores en Espacio de EstadosJames BenavidesAún no hay calificaciones
- 1PC Domiciliaria Control3Documento17 páginas1PC Domiciliaria Control3Mauro G. Tarazona LévanoAún no hay calificaciones
- Tercera PracticaDocumento17 páginasTercera PracticaFrank Parra AAún no hay calificaciones
- Sistemas de Control Digital ImparesDocumento23 páginasSistemas de Control Digital ImparesJohn Walter Ticona QuispeAún no hay calificaciones
- Practica de Control DigitalDocumento22 páginasPractica de Control Digitalg10382776Aún no hay calificaciones
- Solucionario Examen Recuperatorio G 1 2020 Diseño de SistemasDocumento5 páginasSolucionario Examen Recuperatorio G 1 2020 Diseño de SistemasCristian ChoZegAún no hay calificaciones
- Modelización de Sistemas DiscretosDocumento9 páginasModelización de Sistemas DiscretosacajahuaringaAún no hay calificaciones
- HathDocumento63 páginasHathDanielContrerasContrerasAún no hay calificaciones
- SistemasdecontrolDocumento13 páginasSistemasdecontrolCristian GrandaAún no hay calificaciones
- Tarea 3 Controlador y Observador Sistema MIMODocumento22 páginasTarea 3 Controlador y Observador Sistema MIMOMishell Sanchez Guevara0% (1)
- Control Digital - Problemas 2Documento10 páginasControl Digital - Problemas 2howdyou56Aún no hay calificaciones
- 3º Practica de Control III - 1Documento24 páginas3º Practica de Control III - 1Alex Arias CordovaAún no hay calificaciones
- Señales y Sistemas - FIEE UNI 1PCDocumento11 páginasSeñales y Sistemas - FIEE UNI 1PCrolandotomantoAún no hay calificaciones
- Examen QUimicaDocumento2 páginasExamen QUimicarolandotomantoAún no hay calificaciones
- Examen Final Quimica UNIDocumento2 páginasExamen Final Quimica UNIrolandotomantoAún no hay calificaciones
- Cuaderno de InformesDocumento31 páginasCuaderno de InformesMoises PapuicoAún no hay calificaciones
- Tema 1Documento68 páginasTema 1Alberto Vázquez ParedesAún no hay calificaciones
- Trabajo Final de Metodologia de La InvestigacionDocumento35 páginasTrabajo Final de Metodologia de La InvestigacionRonaldo CarbajalAún no hay calificaciones
- Preguntas Dinamizadoras Unidad 2Documento2 páginasPreguntas Dinamizadoras Unidad 2Jessie Johanna ArevaloAún no hay calificaciones
- CHAFLANESDocumento8 páginasCHAFLANESAngie Suescún100% (1)
- Pares Academicos Enero 2021Documento348 páginasPares Academicos Enero 2021Juan Andres MartinezAún no hay calificaciones
- Arquitectura de Hardware Eje 4Documento12 páginasArquitectura de Hardware Eje 4Santiago Jaramillo UchimaAún no hay calificaciones
- Trabajofinal 2 Electricidad BasicaDocumento8 páginasTrabajofinal 2 Electricidad BasicaMarco Antonio Huachaca LlicahuaAún no hay calificaciones
- Perfil Psicologo de Exito CONFERENCIA UasdDocumento3 páginasPerfil Psicologo de Exito CONFERENCIA UasdJarilyn Javier VAún no hay calificaciones
- Termino ExcluidoDocumento3 páginasTermino ExcluidoGladys Marleny Alva LeonAún no hay calificaciones
- Jose Manuel Da Vinci JJKDocumento11 páginasJose Manuel Da Vinci JJKJose Manuel AlvaradoAún no hay calificaciones
- 1) Usando El Teorema de L'Hopital Calcule El Siguiente LímiteDocumento5 páginas1) Usando El Teorema de L'Hopital Calcule El Siguiente LímiteSebastian QPAún no hay calificaciones
- Calvinismo y Misiones Don FanningDocumento40 páginasCalvinismo y Misiones Don FanningDanielHoracioOubelAún no hay calificaciones
- Trabajo Práctico N°6: Luzia Alonso Iannone, Navila El Hage, Diana Lopez Duarte, M. Sol IllanesDocumento9 páginasTrabajo Práctico N°6: Luzia Alonso Iannone, Navila El Hage, Diana Lopez Duarte, M. Sol IllanesAgustina FeijooAún no hay calificaciones
- GLCMDocumento13 páginasGLCMPuig CozarAún no hay calificaciones
- Ejercicios de AutomatizacionDocumento16 páginasEjercicios de AutomatizacionJhonatan Lopez MitaccAún no hay calificaciones
- S01.s1 - TIPOS-Y-OPERACIONES-CON-MATRICESDocumento21 páginasS01.s1 - TIPOS-Y-OPERACIONES-CON-MATRICESbryan darly quispe sotoAún no hay calificaciones
- Circuitos de Corriente Continua-Paul TippensDocumento14 páginasCircuitos de Corriente Continua-Paul TippensRaul Alberto Fassora Voigt0% (1)
- Audiencia Concentrada - Ley 1826 de 2017Documento5 páginasAudiencia Concentrada - Ley 1826 de 2017Anthonny HolguinAún no hay calificaciones
- INTRODUCCIÓNDocumento5 páginasINTRODUCCIÓNDaniel SanchezAún no hay calificaciones
- Ensayo SocratesDocumento5 páginasEnsayo SocratesAlee AleeAún no hay calificaciones
- HV Diego Armando Martínez SemaDocumento5 páginasHV Diego Armando Martínez Semanubia esperanza munar pachecoAún no hay calificaciones
- OMNIX-Corp (Es) DeckDocumento16 páginasOMNIX-Corp (Es) DeckArmando HuarotoAún no hay calificaciones
- Primera Evidencia Cesar Andres Barrera GomezDocumento3 páginasPrimera Evidencia Cesar Andres Barrera GomezAndres BarreraAún no hay calificaciones
- TG - Ladino Quintero, Luisa Fernanda.Documento101 páginasTG - Ladino Quintero, Luisa Fernanda.Rubén BarreraAún no hay calificaciones
- BB Glow 2023Documento6 páginasBB Glow 2023Oporto Castro VaneAún no hay calificaciones
- Antecedentes de La Psicologia.Documento3 páginasAntecedentes de La Psicologia.Sara RuizAún no hay calificaciones
- Inv Ope1 EmpaquetadurasDocumento24 páginasInv Ope1 EmpaquetadurasMorales Soto Andrea PamelaAún no hay calificaciones