También podría gustarte
- Diseño de Controladores en Espacio de EstadosDocumento4 páginasDiseño de Controladores en Espacio de EstadosJames BenavidesAún no hay calificaciones
- Practica de Control DigitalDocumento22 páginasPractica de Control Digitalg10382776Aún no hay calificaciones
- Tarea 1 SDC 2015Documento22 páginasTarea 1 SDC 2015Salvador Gallardo100% (1)
- Tarea - Sistemas de Control IiDocumento21 páginasTarea - Sistemas de Control IiBoris Benites CalenzaniAún no hay calificaciones
- Sistema de Control DiscretoDocumento21 páginasSistema de Control DiscretorolandotomantoAún no hay calificaciones
- Diseño de Un Control Por Ubicación de PolosDocumento6 páginasDiseño de Un Control Por Ubicación de PolosSuave VillegasAún no hay calificaciones
- Control de nivel de tanqueDocumento24 páginasControl de nivel de tanqueAlex Arias CordovaAún no hay calificaciones
- Problemas Control Moderno Resuelto (Discreto)Documento11 páginasProblemas Control Moderno Resuelto (Discreto)Karol SaenzAún no hay calificaciones
- Simulacion de Suspension Activa y Pasiva de Un Cuarto de Automovil en Variables de EstadoDocumento12 páginasSimulacion de Suspension Activa y Pasiva de Un Cuarto de Automovil en Variables de EstadoDavid Guadiana Martínez50% (2)
- SistemasdecontrolDocumento13 páginasSistemasdecontrolCristian GrandaAún no hay calificaciones
- Proyecto Final SCDocumento27 páginasProyecto Final SCjpadron045Aún no hay calificaciones
- Solucion - EXAMEN FINAL DE CONTROL DIGITALDocumento5 páginasSolucion - EXAMEN FINAL DE CONTROL DIGITALJuan Manuel VargasAún no hay calificaciones
- Introducción al control RSTDocumento11 páginasIntroducción al control RSTDANIELA ALEJANDRA BUSTOS CASTELLANOSAún no hay calificaciones
- Sistema Masa Resorte AmortiguadorDocumento8 páginasSistema Masa Resorte AmortiguadorDayan VillanuevaAún no hay calificaciones
- Actividades Control de ProcesosDocumento26 páginasActividades Control de ProcesosDaniel PalaciosAún no hay calificaciones
- Tarea 5Documento9 páginasTarea 5JHLAún no hay calificaciones
- TALLER Nº3 Mateaplica2Documento11 páginasTALLER Nº3 Mateaplica2ronni bermudezAún no hay calificaciones
- Control vector estado 40Documento111 páginasControl vector estado 40Juan Camilo MonguiAún no hay calificaciones
- 1.9circulacion - y - Flujo Exposicion PDFDocumento13 páginas1.9circulacion - y - Flujo Exposicion PDFAndresfelipe9527Aún no hay calificaciones
- Control de velocidad de motores DVDDocumento9 páginasControl de velocidad de motores DVDGademara100% (1)
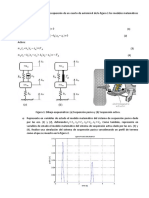
- Figura 1. (A) Función de Transferencia (B) Diagrama de Bloques de La Funcion de TransferenciaDocumento5 páginasFigura 1. (A) Función de Transferencia (B) Diagrama de Bloques de La Funcion de TransferenciaDarwin DiazAún no hay calificaciones
- Repaso 1Documento16 páginasRepaso 1Ernesto RQAún no hay calificaciones
- Documento Completo ModeladoDocumento52 páginasDocumento Completo ModeladoRaul Roque YujraAún no hay calificaciones
- TP ControlDocumento11 páginasTP ControlnahuAún no hay calificaciones
- SCA P8 Andrés Ramírez GR3-2Documento5 páginasSCA P8 Andrés Ramírez GR3-2Andrés RamírezAún no hay calificaciones
- Solución Parcial Geometría DiferencialDocumento9 páginasSolución Parcial Geometría DiferencialLuis OcañaAún no hay calificaciones
- Respuesta ante señal escalón y diseño de compensador para sistema de controlDocumento8 páginasRespuesta ante señal escalón y diseño de compensador para sistema de controlJorge Luis Jerezano EscobarAún no hay calificaciones
- Levitador MagnéticoDocumento26 páginasLevitador MagnéticoJ̶ S̶t̶i̶c̶k̶ ̶h̶e̶r̶r̶e̶r̶a̶ ̶m̶a̶n̶r̶i̶q̶u̶e̶Aún no hay calificaciones
- Modelado de un motor DC en tiempo continuo y discreto mediante espacio de estados y SimulinkDocumento25 páginasModelado de un motor DC en tiempo continuo y discreto mediante espacio de estados y SimulinkCarlos HernándezAún no hay calificaciones
- Splines CúblicosDocumento12 páginasSplines CúblicosFacundoAún no hay calificaciones
- Retroalimentacion de EstadosDocumento25 páginasRetroalimentacion de EstadosLeazah Adacnom SoretsellabAún no hay calificaciones
- Deduccion de Los Splines CubicosDocumento10 páginasDeduccion de Los Splines CubicosJulio EspañaAún no hay calificaciones
- Inclinacion de Un Avion - Parte BDocumento13 páginasInclinacion de Un Avion - Parte BDARWIN DARIUS USCCACHI VALENCIAAún no hay calificaciones
- Teoria de Control Clasica Ejercicios ResueltosDocumento182 páginasTeoria de Control Clasica Ejercicios Resueltoslanda100% (1)
- Sistemas de Control Digital ImparesDocumento23 páginasSistemas de Control Digital ImparesJohn Walter Ticona QuispeAún no hay calificaciones
- 5 Respuesta TransitoriaDocumento11 páginas5 Respuesta TransitoriaAmanda GarcíaAún no hay calificaciones
- Interpolación numérica con métodos de Newton y LagrangeDocumento12 páginasInterpolación numérica con métodos de Newton y LagrangePeter PittmanAún no hay calificaciones
- AvnDocumento14 páginasAvnfiboAún no hay calificaciones
- T1 19Documento28 páginasT1 19Leonardo Romero JimenezAún no hay calificaciones
- T. Integrador 2Documento13 páginasT. Integrador 2Pao BelesacaAún no hay calificaciones
- Evaluacion 2 Controladores IndustrialesDocumento16 páginasEvaluacion 2 Controladores IndustrialesArco NegroAún no hay calificaciones
- Examenes SimulaciónDocumento28 páginasExamenes SimulaciónahsimAún no hay calificaciones
- Examen Sustitutorio Control III 2022-IDocumento4 páginasExamen Sustitutorio Control III 2022-I¿De Dónde Soy? Nose xdAún no hay calificaciones
- Ejercicios Tarea 2Documento9 páginasEjercicios Tarea 2Alexis Yuri Chaves BurbanoAún no hay calificaciones
- Capítulo 5Documento25 páginasCapítulo 5jesusAún no hay calificaciones
- Desarrollo Circuitos Electricos Sept-20-20Documento6 páginasDesarrollo Circuitos Electricos Sept-20-20libia nancy beltranAún no hay calificaciones
- Métodos numéricos aplicados a ingenieríaDocumento11 páginasMétodos numéricos aplicados a ingenieríaMELANY DIANNE BARBA BEJARANOAún no hay calificaciones
- Control Moderno Ogata Ejercicios 8Documento12 páginasControl Moderno Ogata Ejercicios 8DavidAún no hay calificaciones
- Reducción de Bloques Por Medio de SimulinkDocumento8 páginasReducción de Bloques Por Medio de SimulinkJohn SalchiconAún no hay calificaciones
- Ejercicio 8,3Documento12 páginasEjercicio 8,3Marian AmayaAún no hay calificaciones
- PROCEDIMIENTOS EVALUACIÓN 5 (Método de Gauss-Seidel)Documento9 páginasPROCEDIMIENTOS EVALUACIÓN 5 (Método de Gauss-Seidel)Samuel RamsbottAún no hay calificaciones
- LGR Control AutomaticoDocumento23 páginasLGR Control AutomaticoCarlos VergaraAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- SimplexDocumento24 páginasSimplexJames BenavidesAún no hay calificaciones
- Problemas de optimización resueltos con métodos como Simplex y Euler-LagrangeDocumento9 páginasProblemas de optimización resueltos con métodos como Simplex y Euler-LagrangeJames BenavidesAún no hay calificaciones
- Ejercicio de OptimizacionDocumento10 páginasEjercicio de OptimizacionJames BenavidesAún no hay calificaciones
- Resumen YesicaDocumento2 páginasResumen YesicaJames BenavidesAún no hay calificaciones
- DescargaDocumento4 páginasDescargaJames BenavidesAún no hay calificaciones
- Clasificador KNNDocumento9 páginasClasificador KNNJames BenavidesAún no hay calificaciones
- Parcial1 Control2Documento4 páginasParcial1 Control2James BenavidesAún no hay calificaciones
- 2002 Construyendo SaludDocumento161 páginas2002 Construyendo SaludJames BenavidesAún no hay calificaciones
- Machine Learnig en El FármacoDocumento16 páginasMachine Learnig en El FármacoJames BenavidesAún no hay calificaciones
- Marco Teo Rico Figur AsDocumento4 páginasMarco Teo Rico Figur AsJames BenavidesAún no hay calificaciones
- Diseño de Un Sistema de Levitación Magnética Por Espacio de EstadosDocumento15 páginasDiseño de Un Sistema de Levitación Magnética Por Espacio de EstadosJames BenavidesAún no hay calificaciones
- Marco Teo Rico Figur AsDocumento4 páginasMarco Teo Rico Figur AsJames BenavidesAún no hay calificaciones
- Porc I CulturaDocumento1 páginaPorc I CulturaJames BenavidesAún no hay calificaciones
- Multiplicadores de LagrangeDocumento14 páginasMultiplicadores de LagrangeJames BenavidesAún no hay calificaciones
- Modelamiento y Simulación de Péndulo InvertidoDocumento19 páginasModelamiento y Simulación de Péndulo InvertidoJames BenavidesAún no hay calificaciones
- Modelamiento y Simulación de Péndulo InvertidoDocumento19 páginasModelamiento y Simulación de Péndulo InvertidoJames BenavidesAún no hay calificaciones
- Porc I CulturaDocumento1 páginaPorc I CulturaJames BenavidesAún no hay calificaciones
- RoboticaDocumento23 páginasRoboticaJames BenavidesAún no hay calificaciones
- Multiplicadores de LagrangeDocumento14 páginasMultiplicadores de LagrangeJames BenavidesAún no hay calificaciones
- Aplicaciones Del Aprendizaje Automático en El Descubrimiento y Desarrollo de FármacosDocumento3 páginasAplicaciones Del Aprendizaje Automático en El Descubrimiento y Desarrollo de FármacosJames BenavidesAún no hay calificaciones
- Aplicaciones Del Aprendizaje Automático en El Descubrimiento y Desarrollo de FármacosDocumento3 páginasAplicaciones Del Aprendizaje Automático en El Descubrimiento y Desarrollo de FármacosJames BenavidesAún no hay calificaciones
- Aplicaciones Del Aprendizaje Automático en El Descubrimiento y Desarrollo de FármacosDocumento3 páginasAplicaciones Del Aprendizaje Automático en El Descubrimiento y Desarrollo de FármacosJames BenavidesAún no hay calificaciones
- Guia Expo SVNvsANNDocumento2 páginasGuia Expo SVNvsANNJames BenavidesAún no hay calificaciones
- Parcial 2ProcesosInd20202Documento5 páginasParcial 2ProcesosInd20202James BenavidesAún no hay calificaciones
- SOLUCIONPARCIAL2Documento5 páginasSOLUCIONPARCIAL2James BenavidesAún no hay calificaciones
- Sección 1: El Mundo y Sus DemoniosDocumento1 páginaSección 1: El Mundo y Sus DemoniosJames BenavidesAún no hay calificaciones
- Modelamiento Pendulo InvertidoDocumento10 páginasModelamiento Pendulo InvertidoJames BenavidesAún no hay calificaciones
- Inteligencia de negocios: Estado del arteDocumento7 páginasInteligencia de negocios: Estado del arteJames BenavidesAún no hay calificaciones
- Dialnet DelHabeasCorpusAlHabeasData 4482974Documento10 páginasDialnet DelHabeasCorpusAlHabeasData 4482974James BenavidesAún no hay calificaciones
- Guía Práctica 4 - Virtual - Soluciones - Diluciones y PHDocumento8 páginasGuía Práctica 4 - Virtual - Soluciones - Diluciones y PHJames BenavidesAún no hay calificaciones
- Practica 4Documento5 páginasPractica 4dinamokiev86Aún no hay calificaciones
- 2° - Lógico Matemático - 2dotrimestreDocumento40 páginas2° - Lógico Matemático - 2dotrimestrekeroaperAún no hay calificaciones
- Presentación Tarea 2 - Integracion Por Sustitucion Trigonometrica y Fracciones ParcialesDocumento43 páginasPresentación Tarea 2 - Integracion Por Sustitucion Trigonometrica y Fracciones ParcialesYAN MARTYINEZAún no hay calificaciones
- Practica 2 - Vectores y Operaciones Con Vectores - Fisica 1Documento3 páginasPractica 2 - Vectores y Operaciones Con Vectores - Fisica 1montalvoc8700% (1)
- Clase # 3 Alg IIDocumento13 páginasClase # 3 Alg IIDenis donando Madariaga lopezAún no hay calificaciones
- Tarea 2Documento15 páginasTarea 2Karen Tatiana AbelloAún no hay calificaciones
- 03.-Seminario 3 Toc Minimizacion Funciones ConmutacionDocumento53 páginas03.-Seminario 3 Toc Minimizacion Funciones Conmutacione561826Aún no hay calificaciones
- Guía de despeje de fórmulas y ecuacionesDocumento10 páginasGuía de despeje de fórmulas y ecuacionesjesus0% (1)
- Conceptos básicos de expresiones algebraicasDocumento40 páginasConceptos básicos de expresiones algebraicasdirkAún no hay calificaciones
- Aproximación LinealDocumento3 páginasAproximación LinealJonathan RicoAún no hay calificaciones
- Algebra Universidad Técnica de Babahoyo-1Documento20 páginasAlgebra Universidad Técnica de Babahoyo-1Edwin BeltranAún no hay calificaciones
- Aparicio Hidalgo Raquel Práctica BLUPDocumento5 páginasAparicio Hidalgo Raquel Práctica BLUPRaquel Aparicio HidalgoAún no hay calificaciones
- MatricesDocumento34 páginasMatricesMelanie MolinaAún no hay calificaciones
- Interpolación polinomio Newton diferencias divididasDocumento7 páginasInterpolación polinomio Newton diferencias divididasBladimir Perez SilvaAún no hay calificaciones
- Reina de Los Angeles : Sandra Y. Manco ChumpitazDocumento2 páginasReina de Los Angeles : Sandra Y. Manco ChumpitazCerro AzulAún no hay calificaciones
- Función Lineal - Wikipedia, La Enciclopedia Libre PDFDocumento11 páginasFunción Lineal - Wikipedia, La Enciclopedia Libre PDFere wetAún no hay calificaciones
- Matematica Basica Tarea 1Documento4 páginasMatematica Basica Tarea 1wanderlin acostaAún no hay calificaciones
- Matemática I - CB001Documento2 páginasMatemática I - CB001Anonymous sCMne0CYTU100% (1)
- MAtLab Con Ecuaciones DiferencialesDocumento9 páginasMAtLab Con Ecuaciones DiferencialesLucy Copa GeronimoAún no hay calificaciones
- Practica Calificada de AlgebraDocumento2 páginasPractica Calificada de Algebracontador jeremy semestre 2022Aún no hay calificaciones
- Potencias matemáticas: definición, partes y leyesDocumento8 páginasPotencias matemáticas: definición, partes y leyesAlexander Granada IIAún no hay calificaciones
- EVALUACION MATEMATICAS UNDECIMO ListaDocumento2 páginasEVALUACION MATEMATICAS UNDECIMO ListaFelipe VeraAún no hay calificaciones
- Conceptos básicos de integrales indefinidas y definidasDocumento9 páginasConceptos básicos de integrales indefinidas y definidasMichell OteroAún no hay calificaciones
- Álgebra de CliffordDocumento3 páginasÁlgebra de CliffordpuanAún no hay calificaciones
- Como Enseñar AlgebraDocumento23 páginasComo Enseñar AlgebraArnold Sarmiento SdcsfAún no hay calificaciones
- Evidencias de Matematicas Por DBADocumento6 páginasEvidencias de Matematicas Por DBAJaime Saltarin ViloriaAún no hay calificaciones
- Geometria Diferencial PDFDocumento569 páginasGeometria Diferencial PDFFelipe GarciaAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Tarea 2 - Álgebra SimbólicaDocumento33 páginasGuia de Actividades y Rúbrica de Evaluación - Tarea 2 - Álgebra SimbólicaClub PeliculistaAún no hay calificaciones
- Homomorfismos01 PDFDocumento16 páginasHomomorfismos01 PDFLuis Mario Gamarra CamposAún no hay calificaciones
- Fórmula de AbelDocumento7 páginasFórmula de AbelDiana CochachiAún no hay calificaciones