También podría gustarte
- Lean certification. Certificación de un sistema de gestión leanDe EverandLean certification. Certificación de un sistema de gestión leanAún no hay calificaciones
- Control PIDDocumento6 páginasControl PIDAbiu Rosales0% (2)
- Controles PIDDocumento19 páginasControles PIDilsefridaAún no hay calificaciones
- Herencia EspiritualDocumento2 páginasHerencia EspiritualMiguel Olivares Quintana0% (1)
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Controladores PIDDocumento16 páginasControladores PIDrolando quispeAún no hay calificaciones
- Controlador PidDocumento33 páginasControlador PidAaron Jimenez Chavez100% (1)
- UNIDAD - 3 - CONTROL DE PROCESOS SESION - 6 - 2 - Sintonia - de - Controladores - Método de Ziegler Nichols - Curva - ReacciónDocumento19 páginasUNIDAD - 3 - CONTROL DE PROCESOS SESION - 6 - 2 - Sintonia - de - Controladores - Método de Ziegler Nichols - Curva - ReacciónJhimmy Jhoel Crisostomo PomaAún no hay calificaciones
- Pid ScadaDocumento13 páginasPid ScadaDarwin GarciaAún no hay calificaciones
- Primeros Pasos Con El Bloque de Función PIDE Logix5000Documento9 páginasPrimeros Pasos Con El Bloque de Función PIDE Logix5000Camilo Andrés Mejía CuartasAún no hay calificaciones
- Teoría de Control y RobóticaDocumento6 páginasTeoría de Control y RobóticaRicardo Páramo BernalAún no hay calificaciones
- Pid de Control de TemperaturaDocumento22 páginasPid de Control de TemperaturaJavier Mena50% (2)
- Guia Programacion Avanzad Pid Delta PDFDocumento14 páginasGuia Programacion Avanzad Pid Delta PDFJorgeAún no hay calificaciones
- Control PID de Un HornoDocumento4 páginasControl PID de Un HornoRodrigo Andres Heredia GarcésAún no hay calificaciones
- Lab Control AutomáticoDocumento16 páginasLab Control AutomáticoG4Z JorgeFloridoAún no hay calificaciones
- Instituto Politecnico Nacional: ControladoresDocumento6 páginasInstituto Politecnico Nacional: ControladoresADOLFO LOPEZ HERNANDEZAún no hay calificaciones
- Tarea 5Documento11 páginasTarea 5carlos andres montesAún no hay calificaciones
- PIDDocumento35 páginasPIDAgustin RomangAún no hay calificaciones
- Control PidDocumento11 páginasControl PidLuisAlfredoPerezAún no hay calificaciones
- 3.3 Control ProporcionalDocumento5 páginas3.3 Control ProporcionalCarolina Ramos GonzálezAún no hay calificaciones
- Controladores PIDDocumento10 páginasControladores PIDCesar Adonis VindelAún no hay calificaciones
- PID Opams Proteus 435 Tenicota ChristianDocumento3 páginasPID Opams Proteus 435 Tenicota ChristianKhristian FabricioAún no hay calificaciones
- Control PidDocumento2 páginasControl PidJoshua Nessus Aragonès SalazarAún no hay calificaciones
- Primeros Pasos Con El Bloque de Funcion PIDE Logix5000Documento9 páginasPrimeros Pasos Con El Bloque de Funcion PIDE Logix5000Anonymous u1vBHM69Aún no hay calificaciones
- Inf Previo 5Documento5 páginasInf Previo 5FrankOchoaAún no hay calificaciones
- Guia PID PLC Delta-1Documento14 páginasGuia PID PLC Delta-1José Osses EspinosaAún no hay calificaciones
- Controladores de ProcesoDocumento17 páginasControladores de ProcesoJuan BustamanteAún no hay calificaciones
- PID ComercialesDocumento19 páginasPID ComercialesJuanjo Aguirre0% (1)
- Qué Es Un Controlador PIDDocumento3 páginasQué Es Un Controlador PIDBrandon EscobarAún no hay calificaciones
- Control Industrial Lab 6Documento11 páginasControl Industrial Lab 6Carlos Gabriel Sosaya LezamaAún no hay calificaciones
- Recomendación y Cuidados en El Proceso de MontajeDocumento7 páginasRecomendación y Cuidados en El Proceso de MontajeArnaldo Augusto Alvarado PeñaAún no hay calificaciones
- Control PIDDocumento14 páginasControl PIDOsvaldo Santiago ChavezAún no hay calificaciones
- Practica 5 Sintonía de Los ControladoresDocumento29 páginasPractica 5 Sintonía de Los ControladoresJaneth ReyesAún no hay calificaciones
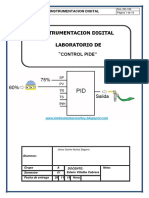
- LABORATORIO Control PIDEDocumento18 páginasLABORATORIO Control PIDEJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab 07 Control PIDDocumento30 páginasLab 07 Control PIDJulio Estefano Flores NinaAún no hay calificaciones
- SINTONIZACION 7864824d54991a5Documento5 páginasSINTONIZACION 7864824d54991a5David lopezAún no hay calificaciones
- Estado Del ArteDocumento3 páginasEstado Del Arteandrea gAún no hay calificaciones
- PAPER RSLoopOptimizerDocumento10 páginasPAPER RSLoopOptimizerRODRIGO SEBASTIÁN ALEAGA RAMÍREZAún no hay calificaciones
- Teoria de Control y RoboticaDocumento11 páginasTeoria de Control y RoboticaAlejandro Fernandez LeonAún no hay calificaciones
- Control Proporcional Integral Derivativo PIDDocumento9 páginasControl Proporcional Integral Derivativo PIDDavid Garza HipolitoAún no hay calificaciones
- Controlador PidDocumento5 páginasControlador PidEliakin Sabrera IngaAún no hay calificaciones
- PID Serie QDocumento22 páginasPID Serie QMendoza DanielAún no hay calificaciones
- Controladores PidDocumento15 páginasControladores PidAaron MedinaAún no hay calificaciones
- CP5 ControladoresDocumento84 páginasCP5 ControladoresGianCarlosQVAún no hay calificaciones
- Control PIDDocumento7 páginasControl PIDCristian Rocha JácomeAún no hay calificaciones
- Informe PidDocumento6 páginasInforme PidWilmer Leonardo Rojas TorresAún no hay calificaciones
- Informe TemperaturaDocumento30 páginasInforme TemperaturaAlejandro LeonAún no hay calificaciones
- Universidad Tecnológica de PueblaDocumento12 páginasUniversidad Tecnológica de PueblaBebedmi Yviviras EternamenteAún no hay calificaciones
- Control PID de Un HornoDocumento4 páginasControl PID de Un HornoFabian Condor0% (1)
- Avr221 Control Pid DiscretoDocumento8 páginasAvr221 Control Pid DiscretoCokis Hdez SAún no hay calificaciones
- Pid CompactDocumento5 páginasPid CompactRusbel GuamánAún no hay calificaciones
- Control PIDDocumento18 páginasControl PIDnelson sevillano zuñigaAún no hay calificaciones
- Informe - Pid MatlabDocumento19 páginasInforme - Pid MatlabDiego VallejosAún no hay calificaciones
- Control TEC PID Ecuaciones SintonizacionDocumento14 páginasControl TEC PID Ecuaciones SintonizacionAlexis TraperoAún no hay calificaciones
- APLICACIONES Pid UltimoDocumento7 páginasAPLICACIONES Pid UltimoSaxobeat Nicolas BartoAún no hay calificaciones
- Marco Teórico Sobre ControladoresDocumento1 páginaMarco Teórico Sobre ControladoresMoniquePatricie0% (1)
- Lab 6 Control DigitalDocumento8 páginasLab 6 Control DigitalCamilo Andrés IbarraAún no hay calificaciones
- Controlador P, I y PIDocumento14 páginasControlador P, I y PIRonaldo FontalvoAún no hay calificaciones
- Clase 3 Modos de Control 2020 - 2 PDFDocumento42 páginasClase 3 Modos de Control 2020 - 2 PDFEdgardo Willson Chambi QuispeAún no hay calificaciones
- Reporte Fina ControlDocumento14 páginasReporte Fina ControlmartinAún no hay calificaciones
- Flipi Control InformeDocumento5 páginasFlipi Control InformeLUIS FERNANDO HOYOS CORREDORAún no hay calificaciones
- Cumpleaños JóvenesDocumento1 páginaCumpleaños JóvenesMiguel Olivares QuintanaAún no hay calificaciones
- Portada CarpetasDocumento3 páginasPortada CarpetasMiguel Olivares QuintanaAún no hay calificaciones
- Plan Formativo Cargador Profe MiguelDocumento6 páginasPlan Formativo Cargador Profe MiguelMiguel Olivares QuintanaAún no hay calificaciones
- Devocional Camp 2024Documento3 páginasDevocional Camp 2024Miguel Olivares QuintanaAún no hay calificaciones
- 147-Las Presiones de Los JovenesDocumento5 páginas147-Las Presiones de Los JovenesJulian Monroy100% (1)
- Aniversarios de Matrimonios IBLADocumento1 páginaAniversarios de Matrimonios IBLAMiguel Olivares QuintanaAún no hay calificaciones
- CUMPLEAÑOS Enero A JunioDocumento2 páginasCUMPLEAÑOS Enero A JunioMiguel Olivares QuintanaAún no hay calificaciones
- Devocional Camp 2024Documento3 páginasDevocional Camp 2024Miguel Olivares QuintanaAún no hay calificaciones
- Resumen Del Libro de AbdíasDocumento1 páginaResumen Del Libro de AbdíasMiguel Olivares QuintanaAún no hay calificaciones
- Aniversarios de Matrimonios IBLADocumento1 páginaAniversarios de Matrimonios IBLAMiguel Olivares QuintanaAún no hay calificaciones
- Carta A Pastor Aldo (13.1.2024)Documento1 páginaCarta A Pastor Aldo (13.1.2024)Miguel Olivares QuintanaAún no hay calificaciones
- Conferencia Iglesia PósterDocumento1 páginaConferencia Iglesia PósterMiguel Olivares QuintanaAún no hay calificaciones
- Contempla A DiosDocumento5 páginasContempla A DiosMiguel Olivares QuintanaAún no hay calificaciones
- Porque La Mujer Usa Aros y El Hombre No Segun La BibliaDocumento1 páginaPorque La Mujer Usa Aros y El Hombre No Segun La BibliaMiguel Olivares QuintanaAún no hay calificaciones
- MARANATHADocumento2 páginasMARANATHAMiguel Olivares QuintanaAún no hay calificaciones
- Ante El Trono CelestialDocumento1 páginaAnte El Trono CelestialMiguel Olivares QuintanaAún no hay calificaciones
- 7 PREGUNTAS BautismoDocumento1 página7 PREGUNTAS BautismoMiguel Olivares QuintanaAún no hay calificaciones
- 7 PREGUNTAS BibliaDocumento2 páginas7 PREGUNTAS BibliaMiguel Olivares QuintanaAún no hay calificaciones
- 7 PREGUNTAS SalvaciónDocumento1 página7 PREGUNTAS SalvaciónMiguel Olivares QuintanaAún no hay calificaciones
- Cómo Puedo Conocer La Voluntad de Dios para Mi VidaDocumento1 páginaCómo Puedo Conocer La Voluntad de Dios para Mi VidaJanio MenaAún no hay calificaciones
- Reflexión Miércoles 09Documento1 páginaReflexión Miércoles 09Miguel Olivares QuintanaAún no hay calificaciones
- ¿Le Estás Dando Lo Mejor A DiosDocumento2 páginas¿Le Estás Dando Lo Mejor A DiosMiguel Olivares QuintanaAún no hay calificaciones
- Ante El Trono CelestialDocumento1 páginaAnte El Trono CelestialMiguel Olivares QuintanaAún no hay calificaciones