También podría gustarte
- Informe Delta VDocumento7 páginasInforme Delta VAlvaro Vargas GonzalesAún no hay calificaciones
- ABB Micrologix PIDDocumento12 páginasABB Micrologix PIDRodrigo HerreraAún no hay calificaciones
- Curso PLC BasicoDocumento63 páginasCurso PLC BasicoAlejandro Ramirez VazquezAún no hay calificaciones
- Lab2tia Portal Fluid SimuDocumento15 páginasLab2tia Portal Fluid SimuHenry Cocha0% (1)
- PY013 Protocolo OPC UADocumento18 páginasPY013 Protocolo OPC UAMatías ErrecartAún no hay calificaciones
- Lab8 PLCDocumento18 páginasLab8 PLCDavid MontescoAún no hay calificaciones
- STEP 7 MicroWIN (Instrucciones)Documento7 páginasSTEP 7 MicroWIN (Instrucciones)Kebyn Juan Pariona Achata100% (1)
- Qué Es Un DaserverDocumento4 páginasQué Es Un DaserverAndresinho SievchenkoAún no hay calificaciones
- Lab 07 - Conversión ADCDocumento10 páginasLab 07 - Conversión ADCDilman Alberto Ccotahuana HuarcaAún no hay calificaciones
- Programacion Del Bloque de Funcion Pide Con Rslogix 5000Documento22 páginasProgramacion Del Bloque de Funcion Pide Con Rslogix 5000Alex PCAún no hay calificaciones
- Practica 4Documento7 páginasPractica 4David Torres HerreraAún no hay calificaciones
- Pentesting en Entornos ControladosDocumento56 páginasPentesting en Entornos ControladosSony EscriAún no hay calificaciones
- PLC IntermedioDocumento70 páginasPLC IntermedioMandrake26Aún no hay calificaciones
- Sistemas de Control y Variacion de PotenciaDocumento58 páginasSistemas de Control y Variacion de PotenciaReneMartinezGutierrezAún no hay calificaciones
- 01 MotivacionDocumento65 páginas01 MotivacionJorge FajardoAún no hay calificaciones
- MM Paa - S7 SCLDocumento68 páginasMM Paa - S7 SCLRubén Pérez GarcíaAún no hay calificaciones
- ET N 103 (ETPyC) - Rev1Documento100 páginasET N 103 (ETPyC) - Rev1Pablo JaraAún no hay calificaciones
- Rs Emulate 500Documento8 páginasRs Emulate 500EdgarXDAún no hay calificaciones
- Servidor OPC MatlabDocumento3 páginasServidor OPC MatlabRolando SaingesAún no hay calificaciones
- Curso de Instrumentos y Sistemas de Control - Clase 2Documento26 páginasCurso de Instrumentos y Sistemas de Control - Clase 2Richard FloresAún no hay calificaciones
- Practica TwinCATDocumento24 páginasPractica TwinCATJaziel Cabral100% (1)
- Dimensionado de Líneas de Media TensiónDocumento27 páginasDimensionado de Líneas de Media TensiónCesar FernandezAún no hay calificaciones
- Control LogixDocumento36 páginasControl LogixCrystal MaidenAún no hay calificaciones
- Flex I-O - 1794Documento64 páginasFlex I-O - 1794Rodriguez FerAún no hay calificaciones
- 1 IntroduccionDocumento38 páginas1 IntroduccionGuillermo Crothers StevensAún no hay calificaciones
- Inicio Rapido Logix 5000Documento76 páginasInicio Rapido Logix 5000Jessi Peña RodríguezAún no hay calificaciones
- LAboratorio PLC M340 PDFDocumento149 páginasLAboratorio PLC M340 PDFedwin quinonezAún no hay calificaciones
- L Red Eye 2G Water-Cut Meter SpanishDocumento4 páginasL Red Eye 2G Water-Cut Meter SpanishRaul DiazAún no hay calificaciones
- Terminologia AutomatizacionDocumento18 páginasTerminologia AutomatizacionPablo GonzálezAún no hay calificaciones
- 2014 - Laboratorio-04-Dcs-redes Ethernet Tcpip - Simulador PLC - 1Documento11 páginas2014 - Laboratorio-04-Dcs-redes Ethernet Tcpip - Simulador PLC - 1christian villaresAún no hay calificaciones
- 1756 Um001 - Es P PDFDocumento212 páginas1756 Um001 - Es P PDFYamir FlorezAún no hay calificaciones
- Qué Es Un PLC de SeguridadDocumento1 páginaQué Es Un PLC de SeguridadelkillyAún no hay calificaciones
- ControlLogix Laboratorio 01 BackupDocumento21 páginasControlLogix Laboratorio 01 Backupruben pichilingueAún no hay calificaciones
- DCS - Plantpax 3.0Documento48 páginasDCS - Plantpax 3.0Jairo FuenzalidaAún no hay calificaciones
- 1794 In019 - Es P PDFDocumento12 páginas1794 In019 - Es P PDFJonAún no hay calificaciones
- Descripciones Cursos Studio 5000Documento7 páginasDescripciones Cursos Studio 5000HenryAún no hay calificaciones
- Calibracion Scanner 3100 EFM CAMERONDocumento4 páginasCalibracion Scanner 3100 EFM CAMERONRaphael PalaciosAún no hay calificaciones
- Curso Prosafe - RSDocumento126 páginasCurso Prosafe - RSVictor100% (1)
- Enlace de PLC Micrologix 1000 Via Rslinx Opc Server y Rslogix Emulate 500 A Scada Rsview32 7Documento40 páginasEnlace de PLC Micrologix 1000 Via Rslinx Opc Server y Rslogix Emulate 500 A Scada Rsview32 7Angel_DuenasAún no hay calificaciones
- Devicenet LaboratorioDocumento31 páginasDevicenet LaboratorioRonald Huarca HuayllaAún no hay calificaciones
- Emulador PLC Allen Bradley PDFDocumento11 páginasEmulador PLC Allen Bradley PDFtanathos18Aún no hay calificaciones
- Una Clase Particular Rápida en El Emulador 5000 de RSLogixDocumento11 páginasUna Clase Particular Rápida en El Emulador 5000 de RSLogixCarlos LealAún no hay calificaciones
- Manual RSLinxDocumento9 páginasManual RSLinxJulio Molina MuñozAún no hay calificaciones
- Mensajeria Rslogix5000Documento10 páginasMensajeria Rslogix5000Diego Andrès OjedaAún no hay calificaciones
- Diseño de Automatización para Riego Tecnificado y SuDocumento134 páginasDiseño de Automatización para Riego Tecnificado y SuFrancisco Javier Esquivel Ventura0% (1)
- Curso Wonderware PgaDocumento61 páginasCurso Wonderware Pgaraul_utbAún no hay calificaciones
- Práctica 525 Version Principiante Great DEMODocumento94 páginasPráctica 525 Version Principiante Great DEMORAUL MUÑOZAún no hay calificaciones
- Tutorial Intouch D PDFDocumento27 páginasTutorial Intouch D PDFRussell ChavezAún no hay calificaciones
- Arquitectura y Software - Racklatina PDFDocumento10 páginasArquitectura y Software - Racklatina PDFAriel PadillaAún no hay calificaciones
- Field BusDocumento27 páginasField BusAndre Williams Montenegro SalcedoAún no hay calificaciones
- Rockwell I Clase 1Documento57 páginasRockwell I Clase 1joelAún no hay calificaciones
- 02-Calculo de Xl-Bc-LAT-UTNDocumento104 páginas02-Calculo de Xl-Bc-LAT-UTNAndresAún no hay calificaciones
- Instrumentación BásicaDocumento18 páginasInstrumentación BásicaIgnacio MoránAún no hay calificaciones
- AADvance MANUAL DE SOLUCIONESDocumento127 páginasAADvance MANUAL DE SOLUCIONESIsaac MendibleAún no hay calificaciones
- DCS Planpax Config e InstalDocumento324 páginasDCS Planpax Config e InstalJorge Luis MartinezAún no hay calificaciones
- Webinar IO-link-IIot-I4.0 PDFDocumento21 páginasWebinar IO-link-IIot-I4.0 PDFTorres JairoAún no hay calificaciones
- Primeros Pasos Con El Bloque de Funcion PIDE Logix5000Documento9 páginasPrimeros Pasos Con El Bloque de Funcion PIDE Logix5000Anonymous u1vBHM69Aún no hay calificaciones
- Primeros Pasos Con El Bloque de Función PIDE Logix5000Documento9 páginasPrimeros Pasos Con El Bloque de Función PIDE Logix5000Camilo Andrés Mejía CuartasAún no hay calificaciones
- Exa3 Lab12 Final PDFDocumento9 páginasExa3 Lab12 Final PDFJorge Enrique Laos PintoAún no hay calificaciones
- Exa3 Lab12 Final PDFDocumento9 páginasExa3 Lab12 Final PDFJorge Enrique Laos PintoAún no hay calificaciones
- CV Jilmar Nuñez Zegarra 2021 11Documento7 páginasCV Jilmar Nuñez Zegarra 2021 11Jilmar Danilo Nunez ZegarraAún no hay calificaciones
- Laboratorio 08 Wireless 1Documento7 páginasLaboratorio 08 Wireless 1Jilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab 01 Instrumentos Patrones de PresiónDocumento11 páginasLab 01 Instrumentos Patrones de PresiónJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab14 ConclusDocumento11 páginasLab14 ConclusJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Laboratorio 09 Registradores 1Documento8 páginasLaboratorio 09 Registradores 1Jilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab 02 Trans Presion ADocumento14 páginasLab 02 Trans Presion AJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Laboratorio N°9 Control AvanzadoDocumento18 páginasLaboratorio N°9 Control AvanzadoJilmar Danilo Nunez ZegarraAún no hay calificaciones
- 99 Conclusiones y RecomendacionesDocumento5 páginas99 Conclusiones y RecomendacionesJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab - 05 - ENetDocumento4 páginasLab - 05 - ENetJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab 05 Integrales Con MatlabDocumento7 páginasLab 05 Integrales Con MatlabJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab - 05 - ENetDocumento4 páginasLab - 05 - ENetJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab 3 Electronica de PotenciaDocumento19 páginasLab 3 Electronica de PotenciaJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab 05 Integrales Con MatlabDocumento7 páginasLab 05 Integrales Con MatlabJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Conclusiones0 HHDocumento1 páginaConclusiones0 HHJilmar Danilo Nunez ZegarraAún no hay calificaciones
- BbA - Lab 5 - Fabricación de PCB de Circuito ElectronicoDocumento13 páginasBbA - Lab 5 - Fabricación de PCB de Circuito ElectronicoJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Grupo 2 Laboratorio 02 MetrologiaDocumento13 páginasGrupo 2 Laboratorio 02 MetrologiaJilmar Danilo Nunez Zegarra100% (1)
- L01 - Transformada de FourierDocumento14 páginasL01 - Transformada de FourierJilmar Danilo Nunez ZegarraAún no hay calificaciones
- Lab16 - Variador de Velocidad ACDocumento24 páginasLab16 - Variador de Velocidad ACJilmar Danilo Nunez Zegarra100% (1)
- El Delito de Fraude InformaticoDocumento16 páginasEl Delito de Fraude InformaticoalejandraAún no hay calificaciones
- Eusebio PerezDocumento10 páginasEusebio PerezALHANA PALACIOS HURTADOAún no hay calificaciones
- Ejercicios Semana 2Documento3 páginasEjercicios Semana 2Tom PinarAún no hay calificaciones
- 2 - Calidad de ServicioDocumento4 páginas2 - Calidad de ServicioErnesto TRAún no hay calificaciones
- Revista Institucional Iestpffaa 2020Documento62 páginasRevista Institucional Iestpffaa 2020Jaczumi Gutiérrez PaucarAún no hay calificaciones
- DMMS U1 A4 JolvDocumento7 páginasDMMS U1 A4 JolvprogsAún no hay calificaciones
- Sustentación MonografiaDocumento5 páginasSustentación Monografiajuan david obando adarme (Juan David Obando)Aún no hay calificaciones
- EL PROHIBIDO 2do Parcial TdCyA PDFDocumento77 páginasEL PROHIBIDO 2do Parcial TdCyA PDFJason Fernández GarciaAún no hay calificaciones
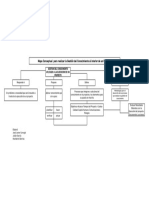
- Mapa Conceptual para Realizar La Gestión Del Conocimiento Al Interior de Un ProyectoDocumento1 páginaMapa Conceptual para Realizar La Gestión Del Conocimiento Al Interior de Un ProyectoJose Javier Carvajal PradaAún no hay calificaciones
- Túnel de Viento Mach 40 para Probar Armas HipersónicasDocumento4 páginasTúnel de Viento Mach 40 para Probar Armas HipersónicasjonathanAún no hay calificaciones
- Unidad 5 Sociologia RuralDocumento6 páginasUnidad 5 Sociologia RuraldenniceAún no hay calificaciones
- COBIT 4.1. Entregar y Dar Soporte DS5 Garantizar La Seguridad de Los Sistemas. by Juan Antonio VásquezDocumento33 páginasCOBIT 4.1. Entregar y Dar Soporte DS5 Garantizar La Seguridad de Los Sistemas. by Juan Antonio VásquezAlexander Leon FlorezAún no hay calificaciones
- Los Derechos Humanos en El CiberespacioDocumento20 páginasLos Derechos Humanos en El CiberespaciogabrielAún no hay calificaciones
- Empower Pre-Intermediate 3 2021Documento3 páginasEmpower Pre-Intermediate 3 2021luxi0Aún no hay calificaciones
- Examen 1 Ensamblaje de ComputadorasDocumento2 páginasExamen 1 Ensamblaje de ComputadorasAugusto Luis ChoqueAún no hay calificaciones
- BB - CA.FO.09.V01.C-BPA Check Instalacion Pernos de AnclajeDocumento14 páginasBB - CA.FO.09.V01.C-BPA Check Instalacion Pernos de AnclajeJuan VilchezAún no hay calificaciones
- 04 Matriz de Entregables May21 Jun21 (R) (R) (R)Documento1 página04 Matriz de Entregables May21 Jun21 (R) (R) (R)Reinerio VásquezAún no hay calificaciones
- Vínculos y NavegaciónDocumento13 páginasVínculos y NavegaciónAnonymous nCSwvW7VAún no hay calificaciones
- Bayona - Radiografía de La Historia Clínica en Perú PDFDocumento115 páginasBayona - Radiografía de La Historia Clínica en Perú PDFShamy LoayzaAún no hay calificaciones
- Test de PersonalidadDocumento2 páginasTest de PersonalidadLeydy Huaccha (anshy)Aún no hay calificaciones
- Servicios AXEDocumento14 páginasServicios AXENoman StevensonAún no hay calificaciones
- Fase 3 Presentacion Diapositiva Servicio SocialDocumento19 páginasFase 3 Presentacion Diapositiva Servicio Socialluisgomezpasion1Aún no hay calificaciones
- Tecnología InformáticaDocumento9 páginasTecnología InformáticajuscatAún no hay calificaciones
- Separata CIENCIA TECNOLOGÍADocumento120 páginasSeparata CIENCIA TECNOLOGÍAvencedorAún no hay calificaciones
- BPM P 044 Laminadora de PastaDocumento1 páginaBPM P 044 Laminadora de Pastamarena loorAún no hay calificaciones
- Canales AlternativosDocumento11 páginasCanales AlternativosJhon Paul Sandoval QuinoAún no hay calificaciones
- Infografia TecnologiaDocumento5 páginasInfografia TecnologiaAngela MartínezAún no hay calificaciones
- Guia para Escribir Un TextoDocumento1 páginaGuia para Escribir Un TextoYari J R LeónAún no hay calificaciones
- Mu Si Pesar5.3Documento41 páginasMu Si Pesar5.3luis AlvarezAún no hay calificaciones
- Señaletica ESPOL Usted Esta AquiDocumento7 páginasSeñaletica ESPOL Usted Esta AquiMágicos OchentasAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Comunicaciones industriales y WinCCDe EverandComunicaciones industriales y WinCCCalificación: 5 de 5 estrellas5/5 (4)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Introducción a la Estadística BayesianaDe EverandIntroducción a la Estadística BayesianaCalificación: 5 de 5 estrellas5/5 (2)
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- UF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)De EverandUF0349: ATENCIÓN AL CLIENTE EN EL PROCESO COMERCIAL (ADGG0208) (ADGD0308)Calificación: 2 de 5 estrellas2/5 (1)
- Breve Manual Redacción Informe TécnicoDe EverandBreve Manual Redacción Informe TécnicoCalificación: 3.5 de 5 estrellas3.5/5 (13)
- Ciberseguridad industrial e infraestructuras críticasDe EverandCiberseguridad industrial e infraestructuras críticasAún no hay calificaciones