También podría gustarte
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- UNIDAD 2 Modelado Geométrico y Analisis Por FEMDocumento14 páginasUNIDAD 2 Modelado Geométrico y Analisis Por FEMErik Dwunit0% (1)
- Método DirectoDocumento5 páginasMétodo DirectoBrayan SanAún no hay calificaciones
- Young Modulus1Documento8 páginasYoung Modulus1Abrahan malaveAún no hay calificaciones
- Elementos Finitos-Metodo DirectoDocumento74 páginasElementos Finitos-Metodo DirectoBryanBarzalloAún no hay calificaciones
- FI3102-Fisica Moderna PDFDocumento7 páginasFI3102-Fisica Moderna PDFAnonymous fOoYhdiOAún no hay calificaciones
- Universidad Nacional Pedro Ruiz GalloDocumento22 páginasUniversidad Nacional Pedro Ruiz GalloRichard Pardo SilvaAún no hay calificaciones
- Informe de Laboratorio 1Documento8 páginasInforme de Laboratorio 1santiago restrepoAún no hay calificaciones
- Introducción Al MEF (Método de Elementos Finitos)Documento39 páginasIntroducción Al MEF (Método de Elementos Finitos)EFRAIN ZUÑIGA MORALESAún no hay calificaciones
- Introducción A Elementos FinitosDocumento14 páginasIntroducción A Elementos FinitosC Junior Olaya SuarezAún no hay calificaciones
- Resolucion de PorticosDocumento65 páginasResolucion de PorticosEdwinGioMoralesAún no hay calificaciones
- Tema 1 - Generalidades Del MEFDocumento16 páginasTema 1 - Generalidades Del MEFEYBER ALEXANDER GARNICA TRUJILLOAún no hay calificaciones
- Introducci N A Elementos FinitosDocumento5 páginasIntroducci N A Elementos FinitosSebastian Quizhpi SalameaAún no hay calificaciones
- Modelado Geometrico y Analisis Por FEMDocumento10 páginasModelado Geometrico y Analisis Por FEMVidal RicanoAún no hay calificaciones
- Ejemplo IsoparametricoDocumento12 páginasEjemplo IsoparametricoWilliam A RuizAún no hay calificaciones
- INTRODUCCIÓN AL MÉTODO DE LOS ELEMENTOS InfinitoDocumento9 páginasINTRODUCCIÓN AL MÉTODO DE LOS ELEMENTOS InfinitoJhordyn V. TeranAún no hay calificaciones
- Armaduras en 3d TeoríaDocumento7 páginasArmaduras en 3d TeoríaGenrri Huamani TacoAún no hay calificaciones
- Elementos Finitos en El Análisis Estructural YamaDocumento13 páginasElementos Finitos en El Análisis Estructural YamaLinda CamargoAún no hay calificaciones
- FEM ArticuloDocumento10 páginasFEM Articulojose enrique castano boteroAún no hay calificaciones
- Capitulo 9.-Introduccion Al Metodo de Los Elementos FinitosDocumento31 páginasCapitulo 9.-Introduccion Al Metodo de Los Elementos FinitosAlfonso MedinaAún no hay calificaciones
- Analisis Estructural de Solidos - Re Servo RioDocumento27 páginasAnalisis Estructural de Solidos - Re Servo RioDuverly Claudio Alarcon MaqueraAún no hay calificaciones
- Metodo de Elementos LinealesDocumento14 páginasMetodo de Elementos LinealesJesus Antonio Ñ ZamudioAún no hay calificaciones
- Función de OndaDocumento3 páginasFunción de Ondajjjaviii2001Aún no hay calificaciones
- Elementos Finitos Elementos Resorte Barra y VigaDocumento27 páginasElementos Finitos Elementos Resorte Barra y VigafreemcivilAún no hay calificaciones
- ANSYS Vs Calculo ManualDocumento14 páginasANSYS Vs Calculo Manualwebs.usuarioAún no hay calificaciones
- Clase 7 2005Documento12 páginasClase 7 2005Favio Garcia ToribioAún no hay calificaciones
- Guía 6 - Ley de HookeDocumento11 páginasGuía 6 - Ley de HookeFaiver RodriguezAún no hay calificaciones
- Laboratorio de FísicaDocumento6 páginasLaboratorio de FísicaMaria VargasAún no hay calificaciones
- Mateo Cartagena 2120222006Documento7 páginasMateo Cartagena 2120222006MATEO CARTAGENA NAVARROAún no hay calificaciones
- Lab 4 Ley de HookeDocumento3 páginasLab 4 Ley de HookeCamilo Andres Marin CastañedaAún no hay calificaciones
- Método MatricialDocumento109 páginasMétodo MatricialIrma Blanca MenesesAún no hay calificaciones
- Modelado UnidimencionalDocumento6 páginasModelado UnidimencionalKeneth CantuAún no hay calificaciones
- Clase 14-Matriz de Rigidez en Coordenadas GlobalesDocumento19 páginasClase 14-Matriz de Rigidez en Coordenadas GlobalesCarlosAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 3 - Tarea 5 - Componente Práctico - Prácticas SimuladasDocumento11 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 3 - Tarea 5 - Componente Práctico - Prácticas SimuladasYulyPaolaGongoraGarciaAún no hay calificaciones
- Introduccion Al Metodo de Los ElementosDocumento25 páginasIntroduccion Al Metodo de Los ElementosLuis Fernando CastanAún no hay calificaciones
- Practica 3 Pandeo. Reto 1Documento16 páginasPractica 3 Pandeo. Reto 1Paolo PaoitAún no hay calificaciones
- Elementos Finitos Aplicados1Documento28 páginasElementos Finitos Aplicados1Freddy DuqueAún no hay calificaciones
- Fórmula de EulerDocumento11 páginasFórmula de EulerMonica QuezadaAún no hay calificaciones
- Introducción A La Mecánica Cuántica IIDocumento5 páginasIntroducción A La Mecánica Cuántica IIMágicos OchentasAún no hay calificaciones
- Asignatura: Análisis Del Elemento Finito. Semana 3 Unidad 1. IntroducciónDocumento9 páginasAsignatura: Análisis Del Elemento Finito. Semana 3 Unidad 1. Introducciónsara yessenia ramirez hernandezAún no hay calificaciones
- Quimica Cuántica Cohorte 2Documento85 páginasQuimica Cuántica Cohorte 2Laura Arias MancoAún no hay calificaciones
- Clase 14-Matriz de Rigidez en Coordenadas GlobalesDocumento19 páginasClase 14-Matriz de Rigidez en Coordenadas GlobalesJordan Aquino RoblesAún no hay calificaciones
- Fisica ElectronicaDocumento6 páginasFisica ElectronicaGerardo Ariza AlvarezAún no hay calificaciones
- Metodo Elementos FinitosDocumento3 páginasMetodo Elementos FinitosAlvaro Daniel ViteriAún no hay calificaciones
- Guía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Tarea 5 - Componente Práctico - Prácticas SimuladasDocumento11 páginasGuía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Tarea 5 - Componente Práctico - Prácticas SimuladasSenaMecánicaElectrónicaAún no hay calificaciones
- Lab 8 Conservacion de EnergiaDocumento22 páginasLab 8 Conservacion de EnergiaDarwin Wagner Mayta Ccuno100% (1)
- Taller-Introducción MefDocumento8 páginasTaller-Introducción MefAndres RamosAún no hay calificaciones
- Elementos Finitos Cap1.3 p2Documento12 páginasElementos Finitos Cap1.3 p2Henry HoyosAún no hay calificaciones
- U2. Modelado Geométrico y Análisis Por FEM.Documento11 páginasU2. Modelado Geométrico y Análisis Por FEM.Miguel Angel CastroAún no hay calificaciones
- Método de Distribución de Momentos - Factores de DistribuciónDocumento9 páginasMétodo de Distribución de Momentos - Factores de DistribuciónAndrea VillanuevaAún no hay calificaciones
- Ae1 - Cap04 - Armaduras ADocumento8 páginasAe1 - Cap04 - Armaduras AMarcos VargasAún no hay calificaciones
- Calculo AvanzadoDocumento9 páginasCalculo AvanzadoLucas NievaAún no hay calificaciones
- Método de Elementos FinitosDocumento39 páginasMétodo de Elementos FinitosRicardo PanimbosaAún no hay calificaciones
- Estática aplicada en ingeniería civil: Introducción al análisis de cerchas, marcos y vigasDe EverandEstática aplicada en ingeniería civil: Introducción al análisis de cerchas, marcos y vigasAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Pregunta 1BDocumento2 páginasPregunta 1BDavid Garcia CorderoAún no hay calificaciones
- Tarea Domiciliaria 1Documento2 páginasTarea Domiciliaria 1David Garcia CorderoAún no hay calificaciones
- Plano AligeradoDocumento1 páginaPlano AligeradoDavid Garcia CorderoAún no hay calificaciones
- Procedimiento Ensayo 1 1Documento3 páginasProcedimiento Ensayo 1 1David Garcia CorderoAún no hay calificaciones
- Presión Lateral de Suelo22Documento48 páginasPresión Lateral de Suelo22Manuel Palomino JorgeAún no hay calificaciones
- Florita TrabajoDocumento16 páginasFlorita TrabajoDavid Garcia CorderoAún no hay calificaciones
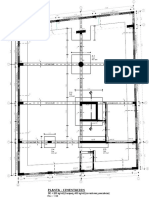
- Plano CimientoDocumento1 páginaPlano CimientoDavid Garcia CorderoAún no hay calificaciones
- PDF4Documento1 páginaPDF4David Garcia CorderoAún no hay calificaciones
- Parametros R.N.E (E.030)Documento1 páginaParametros R.N.E (E.030)David Garcia CorderoAún no hay calificaciones
- 2 Vigas Principales EstructuralesDocumento1 página2 Vigas Principales EstructuralesDavid Garcia CorderoAún no hay calificaciones
- Trabajo Final JuntosDocumento58 páginasTrabajo Final JuntosDavid Garcia CorderoAún no hay calificaciones
- Diseño de AceroDocumento20 páginasDiseño de AceroDavid Garcia CorderoAún no hay calificaciones
- 2 Vigas EstructuralesDocumento2 páginas2 Vigas EstructuralesDavid Garcia CorderoAún no hay calificaciones
- PostgradoDocumento30 páginasPostgradoDavid Garcia CorderoAún no hay calificaciones
- ANTECEDENTESDocumento17 páginasANTECEDENTESDavid Garcia CorderoAún no hay calificaciones
- Plantilla Tesis UNSCHDocumento19 páginasPlantilla Tesis UNSCHDavid Garcia CorderoAún no hay calificaciones
- Clase 04Documento29 páginasClase 04David Garcia CorderoAún no hay calificaciones
- Diseño de Las ZapatasDocumento11 páginasDiseño de Las ZapatasDavid Garcia CorderoAún no hay calificaciones
- Solucionario Pregunta 01-A (MÉTODO HARGREAVES)Documento15 páginasSolucionario Pregunta 01-A (MÉTODO HARGREAVES)David Garcia CorderoAún no hay calificaciones
- Encofrados Metálicos 2023Documento21 páginasEncofrados Metálicos 2023David Garcia CorderoAún no hay calificaciones
- Trabajo Final JuntosDocumento58 páginasTrabajo Final JuntosDavid Garcia CorderoAún no hay calificaciones
- Examen Aplazados HidrologiaDocumento5 páginasExamen Aplazados HidrologiaDavid Garcia CorderoAún no hay calificaciones
- 1 Losas de EntrepisoDocumento2 páginas1 Losas de EntrepisoDavid Garcia CorderoAún no hay calificaciones
- EJERCICIO 2 Solucionario CorregidoDocumento2 páginasEJERCICIO 2 Solucionario CorregidoDavid Garcia CorderoAún no hay calificaciones
- Solucionario Pregunta 01-A (MÉTODO HARGREAVES)Documento15 páginasSolucionario Pregunta 01-A (MÉTODO HARGREAVES)David Garcia CorderoAún no hay calificaciones
- Dede Payaso!Documento9 páginasDede Payaso!David Garcia CorderoAún no hay calificaciones
- Examen de HidrologiaDocumento31 páginasExamen de HidrologiaDavid Garcia CorderoAún no hay calificaciones
- Pregunta 1BDocumento2 páginasPregunta 1BDavid Garcia CorderoAún no hay calificaciones
- Roberto Aguiar Cap 1Documento12 páginasRoberto Aguiar Cap 1David Garcia CorderoAún no hay calificaciones
- Ecuaciones Diferenciales ProyectoDocumento84 páginasEcuaciones Diferenciales ProyectoJose Manuel Quispe RiveraAún no hay calificaciones
- DeterminantesDocumento14 páginasDeterminantesJaneth RomeroAún no hay calificaciones
- 03-28-2019 204758 PM Ejercicios de Introducccion Al CursoDocumento8 páginas03-28-2019 204758 PM Ejercicios de Introducccion Al CursoAlex JCAún no hay calificaciones
- ANEXO 6 SILABO ECUACIONES DIFERENCIALES B EPIER - Wilson HilasacaDocumento6 páginasANEXO 6 SILABO ECUACIONES DIFERENCIALES B EPIER - Wilson Hilasacahuber rony hurtado arhuatAAún no hay calificaciones
- Mód11 EDO2 ParteDocumento22 páginasMód11 EDO2 ParteDamian AzcuetaAún no hay calificaciones
- Jimenez Quintana Edwars PDFDocumento69 páginasJimenez Quintana Edwars PDFcarolinaAún no hay calificaciones
- Analisis de Sistemas DinamicosDocumento19 páginasAnalisis de Sistemas DinamicosOvando100% (1)
- Derivacion e Integracion Numerica MetodoDocumento10 páginasDerivacion e Integracion Numerica Metodojulian sustersickAún no hay calificaciones
- Trabajo de Investigación Formativa GRUPO D Matemática SuperiorDocumento13 páginasTrabajo de Investigación Formativa GRUPO D Matemática SuperiorLeo EscobarAún no hay calificaciones
- Modelado Matemático de Circuitos EléctricosDocumento10 páginasModelado Matemático de Circuitos EléctricosxristianmarcoAún no hay calificaciones
- Hoja 8Documento4 páginasHoja 8gabriel montalvanAún no hay calificaciones
- Numerical Analysis Syllabus PDFDocumento4 páginasNumerical Analysis Syllabus PDFJuan Esteban ZuritaAún no hay calificaciones
- Solucionario de Calculo 3 de MitaccDocumento93 páginasSolucionario de Calculo 3 de MitaccMoises Apz Qmc50% (2)
- FMMA215 s3 GomezDocumento8 páginasFMMA215 s3 GomezVictor Matias Vega ValenciaAún no hay calificaciones
- Ecuaciones Diferenciales Eje 2 Sexto SemestreDocumento17 páginasEcuaciones Diferenciales Eje 2 Sexto SemestreLuisa F. CMAún no hay calificaciones
- Matematica IiiDocumento9 páginasMatematica IiiDaniela MoranAún no hay calificaciones
- Circuito RLC en MatlabDocumento12 páginasCircuito RLC en MatlabHenry Pozo0% (1)
- Situación Problema Equipo 7Documento12 páginasSituación Problema Equipo 7baldomeromartinez371Aún no hay calificaciones
- Ecuacciones Diferencialess - Isa. - Car.Documento670 páginasEcuacciones Diferencialess - Isa. - Car.Elmer Huamán CalleAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias de Primer OrdenDocumento56 páginasEcuaciones Diferenciales Ordinarias de Primer OrdenEnrique DonayreAún no hay calificaciones
- Ecua. Segundo Orden en Matlab PDFDocumento6 páginasEcua. Segundo Orden en Matlab PDFAldo QuesadaAún no hay calificaciones
- Libro TransitoriosDocumento97 páginasLibro TransitoriosMaricarmen Mederos100% (1)
- Guía de Trabajos PrácticosDocumento77 páginasGuía de Trabajos PrácticosEmiliano TutiAún no hay calificaciones
- Ecuaciones Diferenciales de Orden SuperiorDocumento5 páginasEcuaciones Diferenciales de Orden SuperiorAlejandro YugchaAún no hay calificaciones
- Tema 6 NDocumento39 páginasTema 6 NMiguel CastillonAún no hay calificaciones
- Tarea 1 - 100412 - 123.Documento32 páginasTarea 1 - 100412 - 123.JESSY TATIANA SERRANO ARIZAAún no hay calificaciones
- De Donde Sale El Factor Integrante o Factor de Integración y Qué EsDocumento3 páginasDe Donde Sale El Factor Integrante o Factor de Integración y Qué EsJorge Alejandro RuedaAún no hay calificaciones
- Ecuaciones Dif AplicacionesDocumento8 páginasEcuaciones Dif AplicacionesDariela Maylin Oré RamosAún no hay calificaciones
- Informe de Prácticas MetrologíaDocumento6 páginasInforme de Prácticas MetrologíaRonny ZuAún no hay calificaciones