También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaAún no hay calificaciones
- IE-511 Laboratorio 403 y 404 Grupo #9Documento9 páginasIE-511 Laboratorio 403 y 404 Grupo #9aguileraisaiAún no hay calificaciones
- Presentación - LAB. N2Documento27 páginasPresentación - LAB. N2Rensso D'LuisAún no hay calificaciones
- Generador SincrónicoDocumento16 páginasGenerador SincrónicoVane QuinapantaAún no hay calificaciones
- Normas NemaDocumento18 páginasNormas NemaSergio de Jesus Sepulveda Nunez100% (1)
- Manual Técnico Intarcon SH-SF 5.1Documento72 páginasManual Técnico Intarcon SH-SF 5.1Jose Ortuño MartínAún no hay calificaciones
- Instrumento Competencia Pensamiento Creativo y Critico COMMA Ing 2023 Grupo 5 Docx1Documento7 páginasInstrumento Competencia Pensamiento Creativo y Critico COMMA Ing 2023 Grupo 5 Docx1Pary MartAún no hay calificaciones
- Tema 8 Maquinas Electricas RotativasDocumento20 páginasTema 8 Maquinas Electricas RotativasPaolo Alessandro MarcoAún no hay calificaciones
- Wuolah Free UT2 CorrientealternamonofasicaDocumento21 páginasWuolah Free UT2 CorrientealternamonofasicaFernando De la FuenteAún no hay calificaciones
- InformeDocumento3 páginasInformeAndreaAvendañoAún no hay calificaciones
- EI2 Drives A3Documento22 páginasEI2 Drives A3vicentepresencia91Aún no hay calificaciones
- Electrónica - Inversores U Onduladores AutonomosDocumento25 páginasElectrónica - Inversores U Onduladores AutonomosJosé LópezAún no hay calificaciones
- Practica 9Documento24 páginasPractica 9diegoAún no hay calificaciones
- 9.curso Protección de GeneradoresDocumento95 páginas9.curso Protección de GeneradoresBARNABYAún no hay calificaciones
- Iep11 0607Documento24 páginasIep11 0607José Humberto Apodaca AyalaAún no hay calificaciones
- Cap 2. Máquina de Conmutador-Semana-3Documento5 páginasCap 2. Máquina de Conmutador-Semana-3David GgmAún no hay calificaciones
- Ejercicios 3Documento15 páginasEjercicios 3nickolis58754Aún no hay calificaciones
- Laboratorio 03 Motor DCDocumento15 páginasLaboratorio 03 Motor DCCarlos Eduardo Vásquez BolañosAún no hay calificaciones
- SELECCION DE MAQUINAS SINCRONAS - Universidad Nacional Del Callao - LIMA PERÚDocumento18 páginasSELECCION DE MAQUINAS SINCRONAS - Universidad Nacional Del Callao - LIMA PERÚMaguiña Polanco EricAún no hay calificaciones
- Lab IE-511 Reporte #2 (Lecciones 403 y 404) Grupo #1Documento8 páginasLab IE-511 Reporte #2 (Lecciones 403 y 404) Grupo #1aguileraisaiAún no hay calificaciones
- Cap. VIDocumento58 páginasCap. VIenrique yaguno hallasiAún no hay calificaciones
- Me Iii 08 Seleccion de Maquinas SincronasDocumento18 páginasMe Iii 08 Seleccion de Maquinas SincronasDavid MendozaAún no hay calificaciones
- Motor de InducciónDocumento34 páginasMotor de InducciónPerez Ibañez OliverAún no hay calificaciones
- Informe Previo 2-Labo Maquinas 3Documento3 páginasInforme Previo 2-Labo Maquinas 3Lidia HmkAún no hay calificaciones
- Informe Práctica 3 Lab MáquinasDocumento32 páginasInforme Práctica 3 Lab MáquinasSebastian BoscarinoAún no hay calificaciones
- Wuolah Free Practica3 Electronica de PotenciaDocumento17 páginasWuolah Free Practica3 Electronica de PotenciaMarta Valenzuela Del RioAún no hay calificaciones
- Informe Previo Lab Maquina SincronaDocumento4 páginasInforme Previo Lab Maquina SincronalarryAún no hay calificaciones
- Informe Previoo AmplidianDocumento3 páginasInforme Previoo Amplidiancesar preciado herediaAún no hay calificaciones
- Maquina DC y Maquina SincronaDocumento15 páginasMaquina DC y Maquina SincronaCarlos Eduardo Vásquez BolañosAún no hay calificaciones
- Manual de Maquinas de Corriente AlternaDocumento211 páginasManual de Maquinas de Corriente AlternafrayluisAún no hay calificaciones
- Esquemas de GeneradoresDocumento25 páginasEsquemas de GeneradoresRoberto HermenegildoAún no hay calificaciones
- Informe 2Documento5 páginasInforme 2Ivan Dario Lasso LeytonAún no hay calificaciones
- Informe Lab3Documento18 páginasInforme Lab3Carlos Eduardo Vásquez BolañosAún no hay calificaciones
- 24 Motor de CD en DerivaciónDocumento4 páginas24 Motor de CD en DerivaciónMaricruz Concha PerezAún no hay calificaciones
- IP1-Laboratorio de Maquinas 2Documento6 páginasIP1-Laboratorio de Maquinas 2Luis Malaca HuaracAún no hay calificaciones
- Capitulo 4 - Maquinas SincrónicasDocumento38 páginasCapitulo 4 - Maquinas Sincrónicassantiago arroyoAún no hay calificaciones
- Inversor Monofasico Con Matlab PDFDocumento4 páginasInversor Monofasico Con Matlab PDFRonald RoaAún no hay calificaciones
- Reporte XI - El Motor Universal PDFDocumento9 páginasReporte XI - El Motor Universal PDFEdinson Cortes BallesterosAún no hay calificaciones
- Generador de Excitacion Separada PDFDocumento23 páginasGenerador de Excitacion Separada PDFHugo OrtizAún no hay calificaciones
- Cap 1. Teoria GeneralizadaDocumento28 páginasCap 1. Teoria GeneralizadaJosé Luis García CubasAún no hay calificaciones
- INVERTER GENERAL Presentacion - Tec2Documento36 páginasINVERTER GENERAL Presentacion - Tec2Daniel VicentinAún no hay calificaciones
- Informe Generador SincronoDocumento15 páginasInforme Generador SincronoJohn Deibyth Buitrago SeguraAún no hay calificaciones
- Maquinas SíncronasDocumento38 páginasMaquinas SíncronasNicolás CoelloAún no hay calificaciones
- Informe Previo Nro4 MAQUI2Documento7 páginasInforme Previo Nro4 MAQUI2Hernando Cruz AAún no hay calificaciones
- B Características Eléctricas MotoresDocumento18 páginasB Características Eléctricas MotoresJhan Fragozzo RodríguezAún no hay calificaciones
- Sesion #06Documento57 páginasSesion #06CARLOS ENRIQUE ALVAREZ ALFAROAún no hay calificaciones
- Elo384 Capitulo3aDocumento39 páginasElo384 Capitulo3aJonathan D. PortaAún no hay calificaciones
- Maquina Sincrona en Estado TransitorioDocumento15 páginasMaquina Sincrona en Estado TransitoriobrinnerAún no hay calificaciones
- Electronica de PotenciaDocumento12 páginasElectronica de PotenciaWaldir Flores CamposAún no hay calificaciones
- Tema4.2 Calculo de Motores ElectricosDocumento19 páginasTema4.2 Calculo de Motores ElectricosJose Manuel Moa PerezAún no hay calificaciones
- 03 Repaso Electrónica de PotenciaDocumento47 páginas03 Repaso Electrónica de Potenciamarimir1Aún no hay calificaciones
- Comprobacion de Diferenciales y Medicion de Fugas de CorrienteDocumento42 páginasComprobacion de Diferenciales y Medicion de Fugas de CorrientegomollonjoseluisAún no hay calificaciones
- 3c+5 B Estabilidad SMIBDocumento2 páginas3c+5 B Estabilidad SMIBPAMELA LISETH COLQUE ARAMAYOAún no hay calificaciones
- 1 Conceptos de Sistemas de PotenciaDocumento64 páginas1 Conceptos de Sistemas de PotenciacachiletAún no hay calificaciones
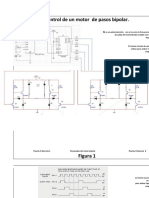
- Control de Un Motor de Pasos BipolarDocumento14 páginasControl de Un Motor de Pasos BipolarJuan Jose Ontiveros MartinezAún no hay calificaciones
- Eeid - Eeid-414 - Manual 1Documento211 páginasEeid - Eeid-414 - Manual 1Jesus Lopez yaja100% (1)
- 02 PF-Flujo de Cargas SDocumento21 páginas02 PF-Flujo de Cargas SErik BVAún no hay calificaciones
- Prot Sist Pot-Capitulo7Documento160 páginasProt Sist Pot-Capitulo7Jhuly AnaAún no hay calificaciones
- PreInforme DC GeneradorDocumento4 páginasPreInforme DC GeneradorFelipe ReyesAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Electricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209De EverandElectricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209Calificación: 2 de 5 estrellas2/5 (1)
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- Ferroresonancia en Sistemas ElectricosDocumento7 páginasFerroresonancia en Sistemas ElectricosPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Análisis Experimental de Métodos de Medición de Resistividad DelDocumento90 páginasAnálisis Experimental de Métodos de Medición de Resistividad DelMarvinJosephDeLaCruzAntaurcoAún no hay calificaciones
- Calculos de AisladoresDocumento10 páginasCalculos de AisladoresFernando Romero Soto Romero Soto100% (1)
- Cárdenas 2019 TGDocumento151 páginasCárdenas 2019 TGPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Grupo 14 - Trabajo de Investigación REVISADODocumento50 páginasGrupo 14 - Trabajo de Investigación REVISADOJHERÚ NAGHYB GALLEGOS PÉREZAún no hay calificaciones
- Estudiocomparativodemodelosdemercadoselectricosenpaisesde America LatinaDocumento12 páginasEstudiocomparativodemodelosdemercadoselectricosenpaisesde America LatinaPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Estudio de Viabilidad para La Implementación de Energías RenovablDocumento160 páginasEstudio de Viabilidad para La Implementación de Energías RenovablPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Cárdenas 2019 TGDocumento151 páginasCárdenas 2019 TGPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Matriz Energética Sostenible para El Perú: WebinarDocumento47 páginasMatriz Energética Sostenible para El Perú: WebinarPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Fundamentos de Puesta A Tierra PDFDocumento8 páginasFundamentos de Puesta A Tierra PDFRoberto ZavaletaAún no hay calificaciones
- Full Catalogue LaGranjaInsulators ES-EN 2019 LowDocumento50 páginasFull Catalogue LaGranjaInsulators ES-EN 2019 LowCésar Díaz LiberonaAún no hay calificaciones
- Central Hidroeléctrica Quitaracsa (112 MW) : ACAR 500 MM 5 KMDocumento1 páginaCentral Hidroeléctrica Quitaracsa (112 MW) : ACAR 500 MM 5 KMPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- TesischaerDocumento137 páginasTesischaerPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Mercado-Electrico Colombia Fedesarrollo 2018 PDFDocumento160 páginasMercado-Electrico Colombia Fedesarrollo 2018 PDFManuelCipagautaZAún no hay calificaciones
- 03 Medicinde ResistividadDocumento27 páginas03 Medicinde ResistividadFranklin ErguetaAún no hay calificaciones
- Módulo IDocumento9 páginasMódulo IPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Anexo 6 Centrales Por Unidad de Generacion 2016Documento26 páginasAnexo 6 Centrales Por Unidad de Generacion 2016PALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Basura A La ElectricidadDocumento79 páginasBasura A La ElectricidadEdson Miranda100% (1)
- Introducción A MatlabDocumento20 páginasIntroducción A MatlabPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- 16-Ley Concesiones Electricas 25844 20100806092559717Documento91 páginas16-Ley Concesiones Electricas 25844 20100806092559717Ericson Cabezudo GarcíaAún no hay calificaciones
- Cables ACSRDocumento3 páginasCables ACSRPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Bne 2019 03 01 2021Documento207 páginasBne 2019 03 01 2021Alexander SeminarioAún no hay calificaciones
- Avance ISE 2019Documento36 páginasAvance ISE 2019PALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Máquinas EléctricasDocumento457 páginasMáquinas Eléctricasgneaf100% (10)
- Cálculo Óptimo de TransformadoresDocumento51 páginasCálculo Óptimo de TransformadoresLarry Flowers100% (3)
- Medicion Electronica Energia-BravoDocumento41 páginasMedicion Electronica Energia-BravoLiliana Salazar LopezAún no hay calificaciones
- Características Del Sector Eléctrico Peruano-2021Documento73 páginasCaracterísticas Del Sector Eléctrico Peruano-2021PALACIOS HERRERA JORGE LUIS100% (1)
- TareaDocumento1 páginaTareaPALACIOS HERRERA JORGE LUISAún no hay calificaciones
- Equilibrio Liquido - Vapor en La Industria QuímicaDocumento21 páginasEquilibrio Liquido - Vapor en La Industria QuímicaKIMBERLY MEYLIN RIOS AYALAAún no hay calificaciones
- Modelos de Examen Resuelto de Operaciones Unitaria 1 PDFDocumento1 páginaModelos de Examen Resuelto de Operaciones Unitaria 1 PDFelvisjon15Aún no hay calificaciones
- Inyectores Bosch Partes de RecambioDocumento3 páginasInyectores Bosch Partes de RecambioJosue SilveiraAún no hay calificaciones
- Normas SoldaduraDocumento5 páginasNormas SoldaduraIvonneAún no hay calificaciones
- PDF View MediaDocumento2 páginasPDF View Mediacaroline covarrubiasAún no hay calificaciones
- 1° EPT Mecanica - 9 Exp Aprend - Jose Ganoza - 16-11-21Documento3 páginas1° EPT Mecanica - 9 Exp Aprend - Jose Ganoza - 16-11-21jose ganozaAún no hay calificaciones
- Construcciones de Obra CivilDocumento3 páginasConstrucciones de Obra CivilTito PantiAún no hay calificaciones
- Calentamiento Global EnsayoDocumento2 páginasCalentamiento Global Ensayosergio flores gamezAún no hay calificaciones
- Examen 2016 TermotecniaDocumento7 páginasExamen 2016 TermotecniaLeyda AtenciaAún no hay calificaciones
- Propuesta de ReciclajeDocumento4 páginasPropuesta de Reciclajecas064carlosAún no hay calificaciones
- ROSA ANELIA AMAYA SANCHEZ 377813 AMEX AZUL b5788Documento4 páginasROSA ANELIA AMAYA SANCHEZ 377813 AMEX AZUL b5788Rosa AmayaAún no hay calificaciones
- Cuestionario de Circuitos Electrico Listo.Documento17 páginasCuestionario de Circuitos Electrico Listo.Jesús GuerrąAún no hay calificaciones
- 1 Memoria DescriptivaDocumento5 páginas1 Memoria DescriptivaJorge Luis Yesang DonaireAún no hay calificaciones
- SSMAA - Secretaría de Sustentabilidad, Medio Ambiente y AguaDocumento6 páginasSSMAA - Secretaría de Sustentabilidad, Medio Ambiente y AguathegoblincompanyAún no hay calificaciones
- Manual de Pasteurizador 5000 Litros Pmo Rio GrandeDocumento8 páginasManual de Pasteurizador 5000 Litros Pmo Rio GrandeDianaPariPerezAún no hay calificaciones
- Formato Medición de Resistencia de Puesta A Tierra en DistribuciónDocumento4 páginasFormato Medición de Resistencia de Puesta A Tierra en DistribuciónCesar Robinson Muro FachoAún no hay calificaciones
- Miniexcavadora: Peso Operativo 1235 KG Motor 3TNV70-WBVB Fuerza de Arranque 5,6 KN Fuerza de Excavación 13,7 KNDocumento8 páginasMiniexcavadora: Peso Operativo 1235 KG Motor 3TNV70-WBVB Fuerza de Arranque 5,6 KN Fuerza de Excavación 13,7 KNAgroindustrial J&JAún no hay calificaciones
- Curso: EE354 Análisis de Sistemas de Potencia II: Escuela Profesional de Ingeniería EléctricaDocumento12 páginasCurso: EE354 Análisis de Sistemas de Potencia II: Escuela Profesional de Ingeniería EléctricaULISES MARIANO MAYANGA MENDOZAAún no hay calificaciones
- Universidad "Ma Esther Zuno de Echeverria": Incorporado A La Secretaria de Educacion CLAVE 05PSU0002FDocumento80 páginasUniversidad "Ma Esther Zuno de Echeverria": Incorporado A La Secretaria de Educacion CLAVE 05PSU0002FEduardo RecioAún no hay calificaciones
- Plan de La Patria 2013 - 2019. Aplicado Al Sector ElectricoDocumento4 páginasPlan de La Patria 2013 - 2019. Aplicado Al Sector ElectricokatherineAún no hay calificaciones
- Taller de Perforación y Voladura Open PitDocumento21 páginasTaller de Perforación y Voladura Open Pitnoe taquima hinchoAún no hay calificaciones
- Catalogo BaifaDocumento43 páginasCatalogo Baifa17980940Aún no hay calificaciones
- Curso: Modelado Y Simulación: de Procesos de Refinería Con Aspen Hysys Petroleum RefiningDocumento9 páginasCurso: Modelado Y Simulación: de Procesos de Refinería Con Aspen Hysys Petroleum RefiningSergio Ali TerrazasAún no hay calificaciones
- Sismogramas y AcelerogramasDocumento6 páginasSismogramas y AcelerogramasKarina Rueda LopezAún no hay calificaciones
- MagnetoterapiaDocumento24 páginasMagnetoterapiaOscar ValladaresAún no hay calificaciones
- GL Las3401 L02MDocumento27 páginasGL Las3401 L02MalfredoAún no hay calificaciones
- Lista de Valvulas PpfishDocumento7 páginasLista de Valvulas PpfishJulio SarasiAún no hay calificaciones
- Micro LocalizaciónDocumento1 páginaMicro LocalizaciónAníbal ric MendezAún no hay calificaciones