3.
TRIGONOMETRIA
María Concepción González Enríquez
3.1 Longitud de arco
La idea de la definición de la longitud de un arco de circunferencia se debe a
Eudoxio (408-355 a.c.) llamado método de exhaustación, el cual usó
arquímedes (250 a.c.).
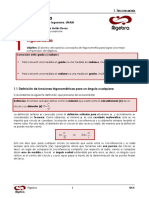
Tomamos una circunferencia de radio y dos puntos , sobre ella el arco
de circunferencia levógiro sobre la circunferencia se denota ( , ) y su
longitud por | ( , )|
R
M1
M2
M3
Se selecciona cualquier punto en el arco, diferente a los extremos,
obteniendo un polígono inscrito
Sea =‖ − ‖+‖ − ‖
Se seleccionan otros puntos , en los arcos de circunferencia ( , )
y ( , ) respectivamente, tomamos
=‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖
Es otra aproximación a la longitud del arco ( , )
comparamos
=‖ − ‖+‖ − ‖
=‖ − + − ‖+‖ − + − ‖
≤‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖=
1
�Sucesivamente se eligen más puntos intermedios en los sub-arcos que se
forman
Y tenemos un conjunto de números reales: < < < ⋯ < <⋯
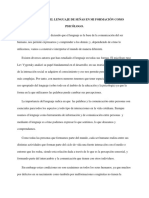
Luego se elige un punto fuera de la circunferencia, considerando los
segmentos haciendo prolongaciones de los segmentos ,
, hasta intersectar el segmento en los puntos ,
respectivamente
T
R
M1
M2 N1
N2
M3
N3
Q
Tenemos
=‖ − ‖=‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖ (1)
Con las desigualdades
‖ − ‖+‖ − ‖=‖ − ‖≤‖ − ‖+‖ − ‖ (2)
‖ − ‖+‖ − ‖=‖ − ‖≤‖ − ‖+‖ − ‖ (3)
‖ − ‖+‖ − ‖=‖ − ‖≤‖ − ‖+‖ − ‖ (4)
‖ − ‖≤‖ − ‖+‖ − ‖ (5)
Sumando las desigualdades (2), (3), (4) y (5)
‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖
+‖ − ‖ +‖ − ‖+‖ − ‖
≤‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖
+‖ − ‖+‖ − ‖+‖ − ‖
2
�‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖
≤‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖+‖ − ‖
Por lo tanto
≤ ‖ − ‖ + ‖ − ‖ usando (1)
En forma similar cualquier ≤ ‖ − ‖+‖ − ‖
Es decir el conjunto < < <⋯< < ⋯ está acotado
superiormente por ‖ − ‖ + ‖ − ‖.
Por el axioma del supremo, existe { }, este número se define como la
longitud del arco ( , ), es decir, | ( , )| = { },
El número se define como la longitud del arco semicircular de radio 1.
En 1949, se calculó con el computador electrónico ENIAC con 2034 cifras
decimales, para lo cual se requirió de 70 horas.
3.2 Funciones trigonométricas y sus gráficas
Consideramos la circunferencia de radio 1 y centro en el origen, cuya longitud
es 2 , la recta de los números reales se enrolla alrededor de la circunferencia,
el intervalo 0, cubre el primer cuadrante en sentido levógiro (el contrario
a las manecillas del reloj), este sentido es asociado a los números positivos; y
el sentido dextrógiro se asocia a los números negativos.
Esta asociación de la recta numérica sobre la circunferencia unitaria define
una función : ℝ → ℝ
Para ∈ ℝ, ( ) = es el punto cuya distancia a lo largo de la
circunferencia al punto (1,0) es
Ejemplos
(0) = (1,0)
= (0,1) − = (0, −1)
( ) = (−1,0) (− ) = (−1,0)
3 3
= (0, −1) − = (0,1)
2 2
3
� (2 ) = (1,0) (−2 ) = (1,0)
En general 2 equivale a revoluciones levógiras y −2 a
revoluciones dextrógiras, por lo tanto ( ) = ( ± 2 )
Definición. Para ∈ ℝ, se define ( ) como la primera coordenada del
punto ( ) = , y ( ) es la segunda coordenada del punto ( ) = .
Es decir ( ) = = ( ), ( )
De los ejemplos anteriores se deduce que
(0) = 1, (0) = 0
= 0, =1 − = 0, −
2 2 2 2
= −1
( ) = −1, ( )=0 (− ) = −1, (− ) = 0
3 3 3 3
= 0, = −1 − = 0, −
2 2 2 2
=1
(2 ) = 1, (2 ) = 0 (−2 ) = 1, (−2 ) = 0
Por la definición de seno y coseno, el dominio de ambas es ℝ, y el rango es
[−1,1] y como vimos son periódicas de periodo mínimo 2
Preliminares para las demostraciones de las propiedades que siguen.
Una transformación de ℝ , es una función : ℝ → ℝ .
Que deforma las figuras que están en el plano del dominio en otra figura en el
plano de la imagen.
Ejemplo. ( , ) = (− , )
Evaluamos la transformación en los vértices del siguiente rectángulo
(0,0) = (0,0), (2,0) = (0,2), (2,3) = (−3,2) (0,3) = (−3,0)
4
� Y Y
(0,3) (2,3)
(3,2)
(0,2)
X X
(0,0) (2,0) (3,0) (0,0)
Una rotación es una transformación especial del plano en el plano que se
define de la siguiente forma ( , ) = + donde ‖ ‖ = 1,
es decir, si = ( , ) entonces + = 1 y tenemos
(1,0) = 1 + 0 =
Y
X
_ _
u u
X
O
Ejemplo de rotación.
Sea = , y
( , )= +
3 4 4 3 3 −4 4 +3
= , + − , = ,
5 5 5 5 5 5
Al igual que las funciones de reales a reales, las transformaciones del plano,
algunas son inyectivas, otras son sobreyectivas, y otras son invertibles.
En particular las rotaciones son invertibles y la inversa de la rotación ( , )
cuyo vector unitario es = ( , ), es la rotación
∗(
, ) = ̅ + ̅ donde ̅ = ( , − ) y satisface
5
� ∗ ∗
∘ = ∘ =
Ejemplo. Para la rotación del ejemplo anterior
( , )= +
3 4 4 3 3 −4 4 +3
= , + − , = ,
5 5 5 5 5 5
Su inversa es
∗(
, )= ̅+ ̅
3 4 4 3 3 + 4 −4 + 3
= ,− + , = ,
5 5 5 5 5 5
Verificaremos que se satisface
∗ ∗
∘ = ∘ =
primero
∗
∘ ( , )= ∗ ( , ) = ∗ ,
1 3 −4 4 +3 1 3 −4 4 +3
= 3 +4 , −4 +3
5 5 5 5 5 5
1 9 − 12 16 + 12 1 −12 + 16 12 + 9
= + , +
5 5 5 5 5 5
9 − 12 + 16 + 12 −12 + 16 + 12 + 9
= ,
25 25
25 25
= , =( , )= ( , )
25 25
Ahora
∘ ∗( , ) = ∗(
, ) = ,
1 3 +4 −4 + 3 1 3 +4 −4 + 3
= 3 −4 , 4 +3
5 5 5 5 5 5
1 9 + 12 16 − 12 1 12 + 16 −12 + 9
= + , +
5 5 5 5 5 5
9 + 12 + 16 − 12 12 + 16 − 12 + 9
= ,
25 25
25 25
= , =( , )= ( , )
25 25
6
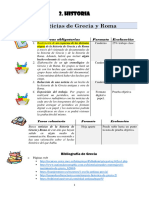
�Para ∈ ℝ se define una rotación cuyo vector unitario es
(1,0) = ( ) = ( ), ( )
De donde en general para cualquier punto ( , ) ∈ ℝ
( , )= ( ), ( ) + − ( ), ( )
= ( )− ( ), ( )+ ( )
Y
(cos(a ), sen(a ))
a
a
(1,0)
X
Nota. Si (1,0) = (cos( ) , ( )), entonces para su inversa se tiene
∗ (1,0)
= (cos( ) , − ( ))
Ejemplo. Rotar al vector unitario un ángulo de en general su regla es
( , )= − , +
√2 √2 √2 √2
= − − , + −
2 2 2 2
Podemos aplicar la rotación en particular a puntos de la recta = , es decir a
puntos de la forma ( , ) y obtenemos
−√2 − √2 √2 − √2
( , )= , = −√2 , 0
2 2
Concluimos que la imagen de tales puntos están sobre el eje negativo.
Nota. Aplicar una rotación seguida de otra rotación es igual a realizar
una rotación es decir
= ∘
7
�Proposición.
cos( + ) = cos( ) cos( ) − ( ) ( )
( + ) = cos( ) ( )+ ( ) cos( )
Demostración.
Calculamos
(1,0) = ( + ) = (cos( + ) , ( + )) (1)
luego
∘ (1,0) = ( (1,0)) = (cos( ) , ( ))
= cos( ) cos( ) , ( ) + ( )(− ( ), cos( ))
= (cos( ) cos( ) − ( ) ( ), cos( ) ( )+ ( )cos( ) (2)
Igualando coordenada a coordenada de (1) y (2) concluimos
cos( + ) = cos( ) cos( ) − ( ) ( )
( + ) = cos( ) ( )+ ( )cos( )
Proposición. (− ) = ( ) y (− ) = − ( )
Demostración. Como
(1,0) = ( + ) = (cos( + ) , ( + ))
En particular
(1,0) = (0) = cos(0) , (0) = (1,0)
Entonces
( ∘ )(1,0) = (1,0) = (0) = cos(0) , (0) = (1,0)
( ∘ )( , ) = (1,0) + (0,1) = ( , ) = ( , )
∗
Por lo que = es la inversa de
como (1,0) = (− ) = (cos(− ) , (− ))
(1,0) = (cos( ) , − ( ))
Igualando coordenada a coordenada con la expresión anterior
Concluimos (− ) = ( ) y (− ) = − ( )
8
�Proposición. − = ( ) y − = ( )
Demostración. Como
(1,0) = = , = (0,1)
2 2 2
( , ) = (0,1) + (−1,0) = (− , )
Luego la aplicamos en seguida
∗
(1,0) = (1,0) = (1,0) = ( ), − ( )
= ( ), ( )
Pero
(1,0) = − , −
2 2
Igualando coordenada a coordenada con la expresión anterior
Concluimos − = ( ) y − = ( )
9
�Las otras funciones trigonométricas se pueden definir en términos de seno y
coseno
( ) ( )
( )= ( )=
( ) ( )
( )= ( )=
( ) ( )
Gráficas de las funciones trigonométricas
La gráfica de la función seno se obtiene tabulando diferente valores entre 0 y
, después aplicando las identidades
( )= ( − )=− ( + )=− (2 − ): para abarcar el
intervalo de 0 a 2 , repitiéndose el trazo de la gráfica cada intervalo de
longitud 2 .
+x -x
x -x
Por lo que tenemos
( )= ( )
Dominio: ℝ
Intersecta al eje en (0,0)
Intersecta al eje en los puntos ( , 0) con ℤ
Simétrica respecto al origen ya que (− ) = − ( ).
Comportamiento en infinito: periódica de período mínimo 2
Imagen: [−1,1]
10
� y
f(x)=sen(x)
x
La gráfica de la función coseno se obtiene como una traslación de la gráfica de
la función seno, ya que ( )= − = +
y
x
f(x)=cos(x)
( )= ( )
Dominio: ℝ
Intersecta al eje en (0,1)
Intersecta al eje en los puntos
( )
+ ,0 = ,0 = , 0 con ℤ
Simétrica respecto al eje ya que (− ) = ( ).
Comportamiento en infinito: periódica de período mínimo 2
Imagen: [−1,1]
( )
( )= ( )=
( )
( )
Dominio: ℝ − { : ( ) = 0} = ℝ − = : ℤ
Intersecta al eje en (0,0)
Intersecta al eje en los puntos ( , 0) con ℤ
Simétrica respecto al origen ya que
11
� ( ) ( )
(− ) = = =− ( )
( ) ( )
( )
Asíntotas verticales en = , ℤ
Comportamiento en infinito: periódica de período mínimo
Imagen: ℝ
y
x
f(x)=tan(x)
( )
( )= ( )=
( )
Dominio: ℝ − { : ( ) = 0} = ℝ − { = : ℤ}
Intersecta al eje : no hay
( )
Intersecta al eje en los puntos ,0 con ℤ
Simétrica respecto al origen ya que
( ) ( )
(− ) = = =− ( )
( ) ( )
Asíntotas verticales en = , ℤ
Comportamiento en infinito: periódica de período mínimo
Imagen: ℝ
y
x
f(x)=cot(x)
12
� ( )= ( )=
( )
( )
Dominio: ℝ − { : ( ) = 0} = ℝ − = : ℤ
Intersecta al eje en (0,1)
Intersecta al eje : no hay
Simétrica respecto al eje ya que
(− ) = = ( )= ( )
( )
( )
Asíntotas verticales en = , ℤ
Comportamiento en infinito: periódica de período mínimo 2
Imagen: (−∞, −1]⋃[1, ∞)
y
f(x)=sec(x) x
( )= ( )=
( )
Dominio: ℝ − { : ( ) = 0} = ℝ − { = : ℤ}
Intersecta al eje : no hay
Intersecta al eje : no hay
Simétrica respecto al eje origen ya que
(− ) = = = − ( ).
( ) ( )
Asíntotas verticales en = , ℤ
Comportamiento en infinito: periódica de período mínimo 2
Imagen: (−∞, −1]⋃[1, ∞)
13
� y
f(x)=csc(x) x
3.3 Identidades trigonométricas
1. 1 + ( )= ( )
Demostración.
( ) ( ) ( )
1+ = = = ( )
( ) ( ) ( )
En forma similar se demuestra
2. 1 + ( )= ( )
3. (2 ) = 2 ( ) ( )
Demostración.
(2 ) = ( ) ( )+ ( ) ( )=2 ( ) ( )
En forma similar se demuestra
4. (2 ) = ( )− ( )=2 ( )−1 = 1−2 ( )
5. ( )= 1− (2 )
Demostración.
Como (2 ) = 1 − 2 ( )
Despejamos ( )= 1− (2 )
En forma similar se demuestra
6. ( )= 1+ (2 )
( ) ( )
7. ( + )=
( ) ( )
14
� Demostración.
( ) ( ) ( )
( ) ( )
= =
( )
+ ( + )
= = = ( + )
− ( + )
8. 2 ( ) ( )= ( − )+ ( + )
Demostración.
( − )+ ( + )
= ( ) (− ) + (− ) ( )+ ( ) ( )+ ( ) ( )
=− ( ) ( )+ ( ) ( )+ ( ) ( )+ ( ) ( )
=2 ( ) ( )
En forma similar se demuestra
9. 2 ( ) ( ) = ( − )+ ( + )
10. 2 ( ) ( )= ( − )− ( + )
11. ( )+ ( )=2 ( + ) ( − )
Usamos
2 ( ) ( )= ( − )+ ( + ) 8)
Con las sustituciones + = , − =
Sumándolas 2 = + → =
Restándolas 2 = − → =
Sustituyendo , , + , − en 8)
2 = ( )+ ( )
En forma similar se demuestra
12. ( )− ( )=2 ( + ) ( − )
13. ( )+ ( )=2 ( + ) ( − )
15
� 14. ( )− ( ) = −2 ( + ) ( − )
Teorema. Para cada par de vectores , diferentes de cero, el ángulo de a
es la rotación donde ( ) está en la dirección de .
⋅ ⋅ ⋅ ⋅
( , )= , + − ,
‖ ‖ ‖ ‖ ‖ ‖ ‖ ‖
Demostración. Se debe satisfacer ( ) = , >0
‖ ( )‖ = ‖ ‖, ‖ ‖ = | | =
‖ ‖ ‖ ‖
Por lo que = ‖ y ( )= (1)
‖ ‖ ‖
También
( )= + = ( , ) + (− , )
=( − , + )
= ( , )+ (− , )= + (2)
De (1) y (2)
‖ ‖
( )= + =
Multiplicamos producto interno con de ambos lados
‖ ‖
( )⋅ +( )⋅ = ⋅
‖ ‖ ⋅
‖ ‖ = ⋅ ó =
‖ ‖
16
�Multiplicamos producto interno con de ambos lados
‖ ‖
( )⋅ +( )⋅ = ⋅
‖ ‖ ⋅
‖ ‖ = ⋅ ó =
‖ ‖
⋅ ⋅
Por lo tanto = ‖ ‖‖ ‖ ‖ ‖‖ ‖
,
Y satisface
⋅ ⋅
( )= + = +
‖ ‖ ‖ ‖
‖ ‖ ⋅ ⋅
= +
‖ ‖ ‖ ‖
‖ ‖ ‖ ‖
= + =
Notación: ∠ , denota el ángulo de a
⋅ ⋅
Como ( , )= + y = , se debe tener
‖ ‖‖ ‖ ‖ ‖‖ ‖
⋅ ⋅
= ‖ ‖‖
,
‖ ‖ ‖‖ ‖
=( , ) para algún que corresponde a la
distancia sobre la circunferencia unitaria desde (1,0) hasta .
Por lo anterior
⋅ ⋅ ⋅
=‖ ‖‖ ‖
=‖ ‖‖ ‖
= =
⋅
Ejemplo. Determine la rotación que lleva el vector (1,2) a la dirección
de (−3,1).
Aquí = (1,2), = (−3,1)
⋅ (1,2) ⋅ (−3,1) −1 −1
= = =
‖ ‖ √1 + 4√9 + 1 √5√10 √50
⋅ (−2,1) ⋅ (−3,1) 7 7
= = =
‖ ‖ √1 + 4√9 + 1 √5√10 √50
17
�Por lo que
−1 7 7 −1 1
( , )= , + −(−1,7) + (−7, −1)
, =
√50 √50 √50 √50 √50
1 1
= (− , 7 ) + (−7 , − ) = (− − 7 , 7 − )
√50 √50
Verificamos que
1 1 5 1
(1,2) = (−1 − 14,7 − 2) = (−15,5) = (−3,1) = (−3,1)
√50 √50 √50 √2
La distancia de ‖ ‖
a ‖ ‖
a lo largo de la circunferencia unitaria, se llama
longitud del arco subtendido por el ángulo ∠ , , esa medida del ángulo se
dice que está en radianes.
y
La longitud de arco de ∠ , sobre una circunferencia de radio es
Ejemplo. Sean = (2,1) = (1,2), calcule seno, coseno y tangente del
ángulo ∠ , . La medida de dicho ángulo.
⋅ (2,1) ⋅ (1,2) 4
= = =
‖ ‖ √5√5 5
⋅ (−1,2) ⋅ (1,2) 3
= = =
‖ ‖ √5√5 5
18
� ⋅ 3
= =
⋅ 4
= 36°52 ó = 0.6434
Nótese que como coseno y seno fueron positivos el punto está en el primer
cuadrante.
Ejemplo. Calcule la longitud de arco del ángulo de = (2,1) = (1,2)
sobre la circunferencia de radio 13.
Por el ejemplo anterior = 0.6434 por lo que = 13(0.6434) = 8.364
3.4 Ángulo intersección de rectas
Una recta dirigida es aquella que tiene asignada una dirección.
A la recta = { + ( , ): ℝ} se le asigna la dirección del vector
1, en el caso de que > 0. Al cociente se le denota =
Si = 0 entonces se le asigna la dirección del vector (0,1)
Ángulo entre dos rectas dirigidas. El ángulo entre las rectas
= { + (1, ): ℝ} y = { + (1, ): ℝ} es el ángulo
entre los vectores (1, ) y (1, )
Sean y rectas no verticales y no ortogonales, con pendientes y
respectivamente, sea el ángulo entre las rectas, es decir entre los
respectivos vectores de dirección, entonces
⋅ (− , 1) ⋅ (1, ) −
= = = =
⋅ (1, ) ⋅ (1, ) 1+
Ejemplo. Encuentre el ángulo entre las rectas dirigidas
:5 − 2 = 5
: =3+8 , = −4 + 6 en ecuación paramétrica
Buscamos dos puntos en para determinar un vector dirección con la resta
de ellos; si = 3 → = 5; = −3 → = −10
Luego (3,5) − (−3, −10) = (6,15) es un vector dirección, dividiendo entre
6, es de la forma (1, ) es 1, .
19
�Para un vector dirección es (8,6) dividiendo entre 8, tenemos 1, .
Por lo tanto
5 3 7
⋅ − , 1 ⋅ 1, − 7(8) 14
= = = 2 4 = 4 =− =−
⋅ 5 3 23 4(23) 23
1, ⋅ 1, 8
2 4
Y = −31.32° = −0.546
Ángulo de inclinación de una recta. El Ángulo de inclinación de la recta
es el ángulo que forma el eje con .
El ángulo de inclinación se considera en − < ≤
Ejemplo. Encuentre el ángulo de inclinación de la recta que pasa por los
puntos (1,0) y (3,5).
La recta tiene vector dirección (3,5) − (1,0) = (2,5)
Equivalente a 1,
De donde = = ( )
5
= = 68.19°
2
20