También podría gustarte
- PROGRAMACION PCP ACTUALIZADA YaskawaDocumento2 páginasPROGRAMACION PCP ACTUALIZADA Yaskawaedinson saenz100% (1)
- Programacion Variadores Yaskawa PCPDocumento2 páginasProgramacion Variadores Yaskawa PCPfrancisco ramosAún no hay calificaciones
- Parametros VVF Yaskawa G500Documento1 páginaParametros VVF Yaskawa G500ariel terceiroAún no hay calificaciones
- Transfer SwichtDocumento7 páginasTransfer SwichtJesusChockArechiderAún no hay calificaciones
- Planos Corregidos 22-08-2012Documento24 páginasPlanos Corregidos 22-08-2012GERMAN1979Aún no hay calificaciones
- CBA32P - Informe Excel - 3C - ResultsDocumento79 páginasCBA32P - Informe Excel - 3C - ResultsJuan Francisco Arriaza MuñozAún no hay calificaciones
- Code PT 002 PDFDocumento1 páginaCode PT 002 PDFEdgar MorochoAún no hay calificaciones
- B A A-B PDFDocumento1 páginaB A A-B PDFLuis Fernando SolanoAún no hay calificaciones
- Tarea 2 METODOLOGIADocumento5 páginasTarea 2 METODOLOGIAJesus Quispe DiazAún no hay calificaciones
- Todos Planos FC 202Documento25 páginasTodos Planos FC 202Jose cespedesAún no hay calificaciones
- Circuito Esquema Del VehiculoDocumento1 páginaCircuito Esquema Del Vehiculoo86558121Aún no hay calificaciones
- Arrancadores PDFDocumento27 páginasArrancadores PDFmarkAún no hay calificaciones
- Documento Fuente TripleDocumento3 páginasDocumento Fuente TripleRick LópezAún no hay calificaciones
- Diagrama Esquemático de Un Inversor de Voltaje DCDocumento4 páginasDiagrama Esquemático de Un Inversor de Voltaje DCalexis jonathanAún no hay calificaciones
- Orom l1000 ParametrosDocumento28 páginasOrom l1000 ParametroscujadiegoAún no hay calificaciones
- Informe 21Documento4 páginasInforme 21ELVIS MENDEZ RODRIGUEZ0% (1)
- Informe 13.Documento3 páginasInforme 13.ELVIS MENDEZ RODRIGUEZAún no hay calificaciones
- Informe 8Documento4 páginasInforme 8ELVIS MENDEZ RODRIGUEZAún no hay calificaciones
- Folleto Linea-3 A02q PDFDocumento2 páginasFolleto Linea-3 A02q PDFelverAún no hay calificaciones
- 25 Regulacion de Velocidad Motor AsincronoDocumento4 páginas25 Regulacion de Velocidad Motor Asincronoladislao10 cayetano estebanAún no hay calificaciones
- Diagrama de Control-ModeloDocumento1 páginaDiagrama de Control-Modelopablosanchezmax2019Aún no hay calificaciones
- Torturator Regreso Rev9Documento15 páginasTorturator Regreso Rev9Victor Heitzmann JordanAún no hay calificaciones
- Sistema Transfer Automatico STAC-1Documento1 páginaSistema Transfer Automatico STAC-1Anibal Jose Cruz LarezAún no hay calificaciones
- FIMER PVS-20!30!33-CCB Quick Installation Guide ES RevBDocumento8 páginasFIMER PVS-20!30!33-CCB Quick Installation Guide ES RevBingdimitriospino_110Aún no hay calificaciones
- A3-Cu-071-3 Ampl Pot PDFDocumento1 páginaA3-Cu-071-3 Ampl Pot PDFPablo GiraudoAún no hay calificaciones
- ACB 24soporteDocumento2 páginasACB 24soporteDarwin Canchari VillcaraniAún no hay calificaciones
- Practica H Con MOSFETDocumento13 páginasPractica H Con MOSFETLuis Daniel Ruíz SalasAún no hay calificaciones
- FORMULADocumento10 páginasFORMULARicardo Calderon ClarosAún no hay calificaciones
- Filtro de Sallen-KeyDocumento22 páginasFiltro de Sallen-KeyVictor Eduardo Chipiaje NuñezAún no hay calificaciones
- Unidad 06 Mando de Motores EléctricosDocumento12 páginasUnidad 06 Mando de Motores EléctricosEmmanuel Florez BuitragoAún no hay calificaciones
- Diagrama EsquemáticoDocumento1 páginaDiagrama EsquemáticoVane Montañez LeónAún no hay calificaciones
- M2P5-F-025 Protocolo Prueba Motor Reductor V3Documento1 páginaM2P5-F-025 Protocolo Prueba Motor Reductor V3Liz Maryury Moreno DazaAún no hay calificaciones
- INFORME TELECOMUNICACIONES Lab1Documento5 páginasINFORME TELECOMUNICACIONES Lab1Sandra Lecoña QuispeAún no hay calificaciones
- #Ttcpecfqtrctcn Orctcufgjcnqigpwtquogv Nkequ: Ignitor For Metal Halide LampsDocumento1 página#Ttcpecfqtrctcn Orctcufgjcnqigpwtquogv Nkequ: Ignitor For Metal Halide Lampspaolo gonzalo padilla gonzalesAún no hay calificaciones
- DIAGRAMAS LOGICOS (Escalera) Apuntes ITMDocumento25 páginasDIAGRAMAS LOGICOS (Escalera) Apuntes ITMEl Tato100% (1)
- Informe 9Documento4 páginasInforme 9ELVIS MENDEZ RODRIGUEZ0% (1)
- Inform 7Documento4 páginasInform 7ELVIS MENDEZ RODRIGUEZ0% (1)
- Plano 2Documento1 páginaPlano 2Constance VillacresesAún no hay calificaciones
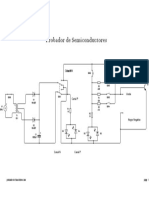
- Esquema Probador de SemiconductoresDocumento1 páginaEsquema Probador de Semiconductoresmemepi100% (1)
- Autoradio Philco Ford AR884Documento1 páginaAutoradio Philco Ford AR884underbitAún no hay calificaciones
- Circuito Arranque Estrella Triangulo - Dwg-ModeloDocumento1 páginaCircuito Arranque Estrella Triangulo - Dwg-ModeloAlejandra TorresAún no hay calificaciones
- P 5829 E TT 1 003 2 - RevCDocumento1 páginaP 5829 E TT 1 003 2 - RevCEmanuel ValdebenitoAún no hay calificaciones
- EXAMEN DIAGNOSTICO LAB 322 301121 (1) .PDF Miiiiii SiuuuuuuuuuuuuuuuuuuuuuuuuDocumento2 páginasEXAMEN DIAGNOSTICO LAB 322 301121 (1) .PDF Miiiiii SiuuuuuuuuuuuuuuuuuuuuuuuuGustavo Jesus Taboada Vasquez100% (1)
- Simulación Fuente Lineal ORCAD PSPICEDocumento4 páginasSimulación Fuente Lineal ORCAD PSPICEAdrian MendozaAún no hay calificaciones
- Preinforme ContadorDocumento3 páginasPreinforme ContadorAlejandro MontoyaAún no hay calificaciones
- 1 ComapDocumento1 página1 Comaparmando blancoAún no hay calificaciones
- Páginas Desdea1-220232837-30-00 2Documento1 páginaPáginas Desdea1-220232837-30-00 2guillote_666100% (1)
- Guia Seleccion AVRDocumento1 páginaGuia Seleccion AVRErick SánchezAún no hay calificaciones
- Sesión 8 - Módulo 6Documento45 páginasSesión 8 - Módulo 6Gustavo Alvarez ManchegoAún no hay calificaciones
- Tema4 01 PracDocumento3 páginasTema4 01 Pracp daAún no hay calificaciones
- Modelo Estilo PLC KoyoDocumento1 páginaModelo Estilo PLC Koyoafvt100% (1)
- Generación de FM DirectaDocumento8 páginasGeneración de FM DirectaCarlos E HernandezAún no hay calificaciones
- 4.7.1-Corrientes Principales en Un TranformadorDocumento13 páginas4.7.1-Corrientes Principales en Un TranformadorHiram FloresAún no hay calificaciones
- Relé Amplifi Cador de Caudal: SerieDocumento6 páginasRelé Amplifi Cador de Caudal: SeriemarcosAún no hay calificaciones
- Protección de BarrasDocumento12 páginasProtección de BarrasmhinojosatAún no hay calificaciones
- Comunicación para La Gestión Desde Un PC.: Programación de Alarmas Con Sus Retardos CorrespondientesDocumento8 páginasComunicación para La Gestión Desde Un PC.: Programación de Alarmas Con Sus Retardos Correspondientesstralis1971Aún no hay calificaciones
- Guía de Programación Rápida V1000Documento4 páginasGuía de Programación Rápida V1000FALCONIANA DE VÍVERES Y SERVICIOS C.AAún no hay calificaciones
- Tarea 01 PLC I A4 UltDocumento4 páginasTarea 01 PLC I A4 UltFranco Cirineo MedinaAún no hay calificaciones
- Manual YaskawaDocumento59 páginasManual YaskawaJuan SerratoAún no hay calificaciones
- Reporte MDD PDFDocumento1 páginaReporte MDD PDFJuan SerratoAún no hay calificaciones
- SVNG QStart - En.esDocumento55 páginasSVNG QStart - En.esJuan Serrato100% (1)
- Manual VSD Novomet Ksu 1 Español (Reparado)Documento71 páginasManual VSD Novomet Ksu 1 Español (Reparado)Juan SerratoAún no hay calificaciones
- Rutina para Volumen JerssonDocumento13 páginasRutina para Volumen JerssonJuan SerratoAún no hay calificaciones
- Bioseguridad en PeluqueriasDocumento36 páginasBioseguridad en PeluqueriasJuan SerratoAún no hay calificaciones
- TFX - EstilosDocumento1 páginaTFX - EstilosJuan SerratoAún no hay calificaciones
- Anexos Protocolo Bioseguridad Mobile City BarberiaDocumento41 páginasAnexos Protocolo Bioseguridad Mobile City BarberiaJuan SerratoAún no hay calificaciones
- Anexos Protocolo Bioseguridad Mobile City BarberiaDocumento33 páginasAnexos Protocolo Bioseguridad Mobile City BarberiaJuan SerratoAún no hay calificaciones
- Patrones ArmonicosDocumento11 páginasPatrones ArmonicosJuan SerratoAún no hay calificaciones
- CHF Ficha General de ProductoDocumento8 páginasCHF Ficha General de ProductoJuanAún no hay calificaciones
- Cultura y Administración de Recursos Humanos en América LatinaDocumento18 páginasCultura y Administración de Recursos Humanos en América LatinaJonna LunaAún no hay calificaciones
- 00 Modulo - Lectura Escritura y Usos de Números Hasta 10 000Documento4 páginas00 Modulo - Lectura Escritura y Usos de Números Hasta 10 000Carlos BeRuizAún no hay calificaciones
- Norma Iso 9001-2015Documento30 páginasNorma Iso 9001-2015ERICK ALBERTO WHANG CASTILLOAún no hay calificaciones
- Qué Son Los Métodos de InvestigaciónDocumento4 páginasQué Son Los Métodos de InvestigaciónTania RivasAún no hay calificaciones
- Concentracion de Las SolucionesDocumento20 páginasConcentracion de Las SolucionesMIGUEL100% (1)
- S04.s2 - Material PDFDocumento12 páginasS04.s2 - Material PDFJohel Marca RomeroAún no hay calificaciones
- Concepto de Aptitud: Examen Medico Ocupacional de IngresoDocumento2 páginasConcepto de Aptitud: Examen Medico Ocupacional de IngresoCOMERCIALIZADORA MONTESAún no hay calificaciones
- M21 U2 A1 Rodr guezHEDocumento5 páginasM21 U2 A1 Rodr guezHEMarisol100% (1)
- Pregrado Taller PC 1Documento27 páginasPregrado Taller PC 1HYREAún no hay calificaciones
- Características de La Educación VirtualDocumento3 páginasCaracterísticas de La Educación VirtualYoselyn LaricoAún no hay calificaciones
- Ventajas y Desventajas de LaDocumento12 páginasVentajas y Desventajas de LapachoAún no hay calificaciones
- Caso Clínico PrácticaDocumento16 páginasCaso Clínico Prácticazg9ngsfwr6Aún no hay calificaciones
- Plantilla Excel Foda Mejorado y Perfil Persona y EmpresaDocumento10 páginasPlantilla Excel Foda Mejorado y Perfil Persona y EmpresaLRNCopyAún no hay calificaciones
- 6bsico Publicidadypropaganda 161111073649Documento3 páginas6bsico Publicidadypropaganda 161111073649Jonatan Barraza TorrecillaAún no hay calificaciones
- Química 2023-1Documento6 páginasQuímica 2023-1monica boscanAún no hay calificaciones
- Evaluacion Unidad 1 Fundamentos de EconomiaDocumento6 páginasEvaluacion Unidad 1 Fundamentos de Economialuz stella IBAÑEZ ARIASAún no hay calificaciones
- Shot - FerDocumento15 páginasShot - FerhualaychoAún no hay calificaciones
- PROSPECTIVA ESTRATEGICA - Fase 3 - Construir El Escenario ApuestaDocumento14 páginasPROSPECTIVA ESTRATEGICA - Fase 3 - Construir El Escenario ApuestaKarolina OrtizAún no hay calificaciones
- 614 TPS 2021-1Documento16 páginas614 TPS 2021-1BERSABE SANTIAGOAún no hay calificaciones
- Caso Empresarial ORGANIZACIÓN RAMO - Anibal MartinezDocumento7 páginasCaso Empresarial ORGANIZACIÓN RAMO - Anibal MartinezAnibal Jose Martinez RomeroAún no hay calificaciones
- Discriminacion LaboralDocumento8 páginasDiscriminacion LaboralEmiliano Montañez CardenasAún no hay calificaciones
- La Causalidad Del Primer Motor InmóvilDocumento24 páginasLa Causalidad Del Primer Motor InmóvilDavid AgustínAún no hay calificaciones
- Historia de La PedagogíaDocumento125 páginasHistoria de La PedagogíaJavier SalvoAún no hay calificaciones
- Tare 6. Prueba de Medias y Varianzas MejoradoDocumento11 páginasTare 6. Prueba de Medias y Varianzas MejoradoalejandroAún no hay calificaciones
- Diez Herramientas Útiles Del CoachingDocumento1 páginaDiez Herramientas Útiles Del CoachingCopy Caja Rural LancetilloAún no hay calificaciones
- Cuadro Comparativo Modelos PedagogicosDocumento3 páginasCuadro Comparativo Modelos PedagogicosDiana Aguilar100% (1)
- Reglamento Interno INDEPENDIZACIONDocumento12 páginasReglamento Interno INDEPENDIZACIONHtr LeocruAún no hay calificaciones
- Test de Fisica Ley de CoulombDocumento3 páginasTest de Fisica Ley de CoulombMarcos Yasviel Gómez HernándezAún no hay calificaciones
- Estadistica Aplicada TeoriaDocumento422 páginasEstadistica Aplicada TeoriaJOSÉ EDUARDOAún no hay calificaciones