También podría gustarte
- Relatividad GeneralDocumento3 páginasRelatividad GeneralEider FarfanAún no hay calificaciones
- ECCU - ECCU-201 - Modulo Logico Entreagable SenatiDocumento18 páginasECCU - ECCU-201 - Modulo Logico Entreagable Senatirealexis100% (8)
- Mecánica RelativistaDocumento13 páginasMecánica Relativistakenya78Aún no hay calificaciones
- Unidad 2 La Planificación de Los Recursos HumanosDocumento4 páginasUnidad 2 La Planificación de Los Recursos Humanosisow95100% (1)
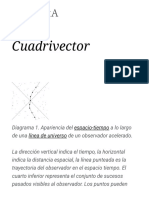
- Cuadrivector DoxDocumento22 páginasCuadrivector DoxPaula DominiqueAún no hay calificaciones
- Ecuacion Del Campo de EisteinDocumento4 páginasEcuacion Del Campo de EisteinChemaAún no hay calificaciones
- OndaDocumento4 páginasOndaCarlos Raul Cantaro RoblesAún no hay calificaciones
- El Gradiente y Los Multiplicadores de LagrangeDocumento21 páginasEl Gradiente y Los Multiplicadores de LagrangePedro MenéndezAún no hay calificaciones
- Formalismo de La Teoría de La RelatividadDocumento3 páginasFormalismo de La Teoría de La RelatividadJosselyn Suque100% (1)
- Ecuaciones Del Campo de EinsteinDocumento5 páginasEcuaciones Del Campo de EinsteinMarito KontreAún no hay calificaciones
- Ecuaciones Del Campo de EinsteinDocumento4 páginasEcuaciones Del Campo de EinsteinBoris Anthony Coveñas LunaAún no hay calificaciones
- Ecuaciones Del Campo de EinsteinDocumento5 páginasEcuaciones Del Campo de EinsteinVictor Cordova GonzalesAún no hay calificaciones
- Física IBDocumento6 páginasFísica IBJulietaSaraAún no hay calificaciones
- FISICADocumento8 páginasFISICAAndrea Eva Aguilar DuranAún no hay calificaciones
- Espacio TiempóDocumento9 páginasEspacio TiempóSamuel HernandezAún no hay calificaciones
- Ecuaciones de EinsteinDocumento4 páginasEcuaciones de EinsteinraymundomartinAún no hay calificaciones
- Investigacion Unidad 1 ElectromagnetismoDocumento39 páginasInvestigacion Unidad 1 ElectromagnetismoPiter ZapataAún no hay calificaciones
- Espacio TiempoDocumento6 páginasEspacio TiempoJordy Leonardo Figueroa LoorAún no hay calificaciones
- Primera Ley de Newton EjerciciosDocumento20 páginasPrimera Ley de Newton EjerciciosMaikke BelisarioAún no hay calificaciones
- MomentumDocumento3 páginasMomentumudaia22Aún no hay calificaciones
- Apuntes Electromagnetismo ETSIIDocumento159 páginasApuntes Electromagnetismo ETSIICarlosAún no hay calificaciones
- Analisis VectorialDocumento6 páginasAnalisis VectorialadcaizaguanoAún no hay calificaciones
- Teoría de La RelatividadDocumento12 páginasTeoría de La RelatividadLeo ScerpellaAún no hay calificaciones
- Electrodinámica Relativista I, II, IIIDocumento72 páginasElectrodinámica Relativista I, II, IIITommyKMerinoAlamaAún no hay calificaciones
- Teoria de La RelatividadDocumento10 páginasTeoria de La RelatividadAleman AurelioAún no hay calificaciones
- Relatividad EspecialDocumento4 páginasRelatividad EspecialdanielAún no hay calificaciones
- Gravedad en Una Cascara de NuezDocumento8 páginasGravedad en Una Cascara de NuezCarlos DesaAún no hay calificaciones
- Teoría de La RelatividadDocumento24 páginasTeoría de La RelatividadRamon ArevaloAún no hay calificaciones
- PDF Merged1Documento168 páginasPDF Merged1Cliff HerrerosAún no hay calificaciones
- Física PDFDocumento185 páginasFísica PDFAnselmo HansAún no hay calificaciones
- Teoría de La RelatividadDocumento29 páginasTeoría de La RelatividadTharly Zurita GarciaAún no hay calificaciones
- Teoría de La RelatividadDocumento11 páginasTeoría de La RelatividadalbinAún no hay calificaciones
- Formalismo de La Teoría de La RelatividadDocumento8 páginasFormalismo de La Teoría de La RelatividadJhon Silva RamosAún no hay calificaciones
- Curso de Relatividad General, Gravitación y Cosmología-Los Diferentes Tensores y Escalares de La Relatividad GeneralDocumento9 páginasCurso de Relatividad General, Gravitación y Cosmología-Los Diferentes Tensores y Escalares de La Relatividad GeneralVictor Cordova GonzalesAún no hay calificaciones
- Movimiento Rectilíneo Uniformemente Acelerado - Wikipedia, La Enciclopedia LibreDocumento8 páginasMovimiento Rectilíneo Uniformemente Acelerado - Wikipedia, La Enciclopedia LibreRitoAntonio_DediosAún no hay calificaciones
- PAPER Teoria de La RelatividadDocumento5 páginasPAPER Teoria de La RelatividadPatrick Fs DeadLoveAún no hay calificaciones
- TeoremaDocumento28 páginasTeoremaEdgarDavidSolorzanoHidalgoAún no hay calificaciones
- Actividad 0 CalculoDocumento15 páginasActividad 0 CalculoAnel Ximena De La Cruz AlvarezAún no hay calificaciones
- Ecuaciones de Movimiento en Mecánica ClásicaDocumento3 páginasEcuaciones de Movimiento en Mecánica ClásicaXiomara Naomi Ramos PolleraAún no hay calificaciones
- Fisica de Los Operadores VectorialesDocumento6 páginasFisica de Los Operadores VectorialesFlor DizAún no hay calificaciones
- La Teoria de La Relatividad GeneralDocumento12 páginasLa Teoria de La Relatividad GeneralasmodiusAún no hay calificaciones
- Principio de IncertidumbreDocumento4 páginasPrincipio de Incertidumbreandreluna63Aún no hay calificaciones
- Modelado huracán Isaac vectoresDocumento6 páginasModelado huracán Isaac vectoresMario Loeza CabreraAún no hay calificaciones
- Potencial de La gravedad-GEODESIADocumento19 páginasPotencial de La gravedad-GEODESIAkathy_bilbaoAún no hay calificaciones
- Relatividad EspecialDocumento24 páginasRelatividad Especialjina japonAún no hay calificaciones
- Campo VectorialDocumento8 páginasCampo Vectorialsuperdany56Aún no hay calificaciones
- Enrique Cantera Del Rio - Espacio Tiempo Materia y Vacio PDFDocumento49 páginasEnrique Cantera Del Rio - Espacio Tiempo Materia y Vacio PDFapi-3701884Aún no hay calificaciones
- Cinematica de ParticulasDocumento19 páginasCinematica de ParticulasGerardo AlonsoAún no hay calificaciones
- Diagramas de MinkowskiDocumento29 páginasDiagramas de MinkowskiJALS100% (1)
- Secc 15.1, Campos VectorialesDocumento38 páginasSecc 15.1, Campos Vectorialesjose2182100% (1)
- Calculo K in A NutshellDocumento4 páginasCalculo K in A NutshelldigmarashAún no hay calificaciones
- Ecuaciones de Lorentz transforman coordenadasDocumento2 páginasEcuaciones de Lorentz transforman coordenadasRaul AguirreAún no hay calificaciones
- Leyes Del Movimiento PlanetarioDocumento15 páginasLeyes Del Movimiento PlanetarioJose Manuel Medina PachecoAún no hay calificaciones
- Calculo Vectorial...Documento4 páginasCalculo Vectorial...Misael Yam CanulAún no hay calificaciones
- Marco Teorico OscilacionesDocumento5 páginasMarco Teorico OscilacionesAlmendra PiñaAún no hay calificaciones
- Deduccion_ec_SchrodingeDocumento22 páginasDeduccion_ec_Schrodingeagosto botellaAún no hay calificaciones
- Elementos Mecanica CuanticaDocumento15 páginasElementos Mecanica Cuanticaapi-3752185100% (1)
- Dimensiones tiempo múltiplesDocumento4 páginasDimensiones tiempo múltiplesluis fernandoAún no hay calificaciones
- Ecuaciones de KleinDocumento7 páginasEcuaciones de KleinClaudia Peña FloresAún no hay calificaciones
- Prensa Hidráulica: by Alexis TafurDocumento7 páginasPrensa Hidráulica: by Alexis TafurrealexisAún no hay calificaciones
- Los Opto Acopladores o Aisladores Ópticos Emiten Una Luz Infrarroja de Un Detector de LuzDocumento2 páginasLos Opto Acopladores o Aisladores Ópticos Emiten Una Luz Infrarroja de Un Detector de LuzrealexisAún no hay calificaciones
- Cuaderno de InformesDocumento14 páginasCuaderno de InformesJosé David Risco CarranzaAún no hay calificaciones
- Altivar Easy 610 - ATV610C16N4Documento4 páginasAltivar Easy 610 - ATV610C16N4Mauricio Cáceres M.Aún no hay calificaciones
- Foro Tematico Mandos de Sitemas HidraulicosDocumento5 páginasForo Tematico Mandos de Sitemas HidraulicosJhOselo Kala J̶ ̶t̶Aún no hay calificaciones
- TAREA 01 PLC I A3 ULT (Reparado)Documento2 páginasTAREA 01 PLC I A3 ULT (Reparado)realexisAún no hay calificaciones
- Región histórica definiciónDocumento3 páginasRegión histórica definiciónrealexisAún no hay calificaciones
- Teoría de La Relatividad EspecialDocumento38 páginasTeoría de La Relatividad EspecialrealexisAún no hay calificaciones
- Trabajo Final PLC 12Documento1 páginaTrabajo Final PLC 12realexisAún no hay calificaciones
- Oficial TecnologiaDocumento16 páginasOficial TecnologiarealexisAún no hay calificaciones
- Día Mundial de La MetrologíaDocumento3 páginasDía Mundial de La MetrologíarealexisAún no hay calificaciones
- Santuario de Artemisa Brauronia (AtDocumento1 páginaSantuario de Artemisa Brauronia (AtrealexisAún no hay calificaciones
- Ime 2108Documento403 páginasIme 2108Diego LezcanoAún no hay calificaciones
- 1°2°-Antes de La SesiónDocumento2 páginas1°2°-Antes de La SesiónrealexisAún no hay calificaciones
- Educacion Fisica Ficha de 4sDocumento1 páginaEducacion Fisica Ficha de 4srealexisAún no hay calificaciones
- 1°2°-Antes de La SesiónDocumento2 páginas1°2°-Antes de La SesiónrealexisAún no hay calificaciones
- Primera Entrega VariadoresDocumento14 páginasPrimera Entrega VariadoresrealexisAún no hay calificaciones
- COVID-19 PandemiaDocumento78 páginasCOVID-19 PandemiaAnnely Belen Noguera MatuteAún no hay calificaciones
- Ime 2108Documento403 páginasIme 2108Diego LezcanoAún no hay calificaciones
- Automatizacion Por Logico ProgramableDocumento8 páginasAutomatizacion Por Logico Programablerealexis100% (1)
- External I DadDocumento13 páginasExternal I DadrealexisAún no hay calificaciones
- Oficial TecnologiaDocumento16 páginasOficial TecnologiarealexisAún no hay calificaciones
- SOLO COPIAR Formato Trabajo Final 123Documento11 páginasSOLO COPIAR Formato Trabajo Final 123realexisAún no hay calificaciones
- Oficial TecnologiaDocumento16 páginasOficial TecnologiarealexisAún no hay calificaciones
- Eeid Eeid-412 TrabajofinalDocumento4 páginasEeid Eeid-412 TrabajofinalrealexisAún no hay calificaciones
- External I DadDocumento13 páginasExternal I DadrealexisAún no hay calificaciones
- External I DadDocumento13 páginasExternal I DadrealexisAún no hay calificaciones
- Universidad Del Valle: Guia de Trabajo Física I - Doc: Omar Calderón LosadaDocumento2 páginasUniversidad Del Valle: Guia de Trabajo Física I - Doc: Omar Calderón LosadaANDREA CATALINA BUESAQUILLO ROSALESAún no hay calificaciones
- Cuadernillo de LateralidadDocumento53 páginasCuadernillo de Lateralidadstefanny rebellon penagosAún no hay calificaciones
- Ensayo Preuniversitario Personalizado PDFDocumento25 páginasEnsayo Preuniversitario Personalizado PDFPatricio ReyesAún no hay calificaciones
- La Reconquista EspañolaDocumento2 páginasLa Reconquista EspañolaDaniela ArceAún no hay calificaciones
- Examen NacionalDocumento9 páginasExamen NacionalPau FloresAún no hay calificaciones
- Los Instrumentos MedievalesDocumento24 páginasLos Instrumentos MedievalesMaria SandovalAún no hay calificaciones
- Para La EticaDocumento9 páginasPara La EticaShaduo 555Aún no hay calificaciones
- Guia Gau55 2017Documento3 páginasGuia Gau55 2017Diego CCAún no hay calificaciones
- Estrategia para el cambio organizacionalDocumento3 páginasEstrategia para el cambio organizacionalEdwin Gabriel Calderón EstradaAún no hay calificaciones
- ACTIVIDADES DE APRENDIZAJE SaniDocumento2 páginasACTIVIDADES DE APRENDIZAJE SaniDavid VilledaAún no hay calificaciones
- Trabajo Comunicacion Aaaron CorregidoDocumento4 páginasTrabajo Comunicacion Aaaron CorregidoJhonn Ramos GonzalesAún no hay calificaciones
- David Apaza 09-07-2021 (OK)Documento2 páginasDavid Apaza 09-07-2021 (OK)David Apaza QuenayaAún no hay calificaciones
- Fitogeografia y Ecologia Del Genero EucalyptusDocumento15 páginasFitogeografia y Ecologia Del Genero EucalyptusEd GutiérrezAún no hay calificaciones
- Tecnolog A de Concreto S7Documento99 páginasTecnolog A de Concreto S7Eduardo MelgarejoAún no hay calificaciones
- Banco de Preguntas I BimestreDocumento11 páginasBanco de Preguntas I Bimestrecésar ponce del carpioAún no hay calificaciones
- Ensayo ScrumDocumento13 páginasEnsayo ScrumdarwingAún no hay calificaciones
- Carlitos CuentoDocumento33 páginasCarlitos CuentoSheyla Ferrera100% (1)
- Teodolito TopoDocumento10 páginasTeodolito TopoToñito B ArroyoAún no hay calificaciones
- Guia Crisis Hipertensiva 2013Documento31 páginasGuia Crisis Hipertensiva 2013Juan JoséAún no hay calificaciones
- Resumen Richard StallmanDocumento8 páginasResumen Richard StallmanIvonne QuinterosAún no hay calificaciones
- ATAPUERCA Cuaderno - Profesor2Documento6 páginasATAPUERCA Cuaderno - Profesor2BAún no hay calificaciones
- Inspección visual alcantarilla AnapoiDocumento1 páginaInspección visual alcantarilla AnapoiPablo GarnicaAún no hay calificaciones
- SietefasesDocumento1 páginaSietefasesIglesia de Cristo Horem Panamá, MEAún no hay calificaciones
- Eritema MultiformeDocumento59 páginasEritema MultiformeJOAQUIN780915Aún no hay calificaciones
- La Lucha Contra La CorrupcionDocumento416 páginasLa Lucha Contra La CorrupcionrpropeAún no hay calificaciones
- Compras Publicas Informe FinalDocumento42 páginasCompras Publicas Informe FinalcarlosAún no hay calificaciones
- Unidad 1 Caso - ExamenDocumento7 páginasUnidad 1 Caso - ExamenLaura Dominguez AcostaAún no hay calificaciones
- Convocatoria Proceso Selectivo para Cobertura Definitiva Puesto Auxiliar de VideotecaDocumento8 páginasConvocatoria Proceso Selectivo para Cobertura Definitiva Puesto Auxiliar de VideotecaJuanAún no hay calificaciones
- Requisitos para Realizar Proyección SocialDocumento2 páginasRequisitos para Realizar Proyección SocialMiguel Angel HuacchoAún no hay calificaciones