También podría gustarte
- Lab05 FernándezDiegoDocumento39 páginasLab05 FernándezDiegoDiego Fernandez ArteagaAún no hay calificaciones
- Caracteristicas de La RTDocumento3 páginasCaracteristicas de La RTfabian gomezAún no hay calificaciones
- Tarea1 - Control Digital (Jonnathanlopez)Documento14 páginasTarea1 - Control Digital (Jonnathanlopez)Jonathan Lozano CastilloAún no hay calificaciones
- Wilsonarevalo Tarea1Documento24 páginasWilsonarevalo Tarea1Jonathan Lozano CastilloAún no hay calificaciones
- Trabajo!!!Documento14 páginasTrabajo!!!MIGUEL ANGEL AHUMADAAún no hay calificaciones
- Identificación de Procesos y Curva de ReacciónDocumento13 páginasIdentificación de Procesos y Curva de ReacciónAlexander Van StrahlenAún no hay calificaciones
- Fase 1 - Lucas TorresDocumento11 páginasFase 1 - Lucas TorresLucas Felipe Torres RojasAún no hay calificaciones
- 10-Presentacion Controlador PidDocumento33 páginas10-Presentacion Controlador PidMARIANOAún no hay calificaciones
- Ut8. Actividades ResueltasDocumento20 páginasUt8. Actividades ResueltasDaniel Garcia FradejasAún no hay calificaciones
- Inforeme 2020Documento8 páginasInforeme 2020naturo Samata valderramaAún no hay calificaciones
- Fase 2 ConsolidadoDocumento30 páginasFase 2 ConsolidadoJuan Carlos Huertas100% (1)
- Fase3 Grupo13Documento10 páginasFase3 Grupo13Carlos Cuartas50% (2)
- Compensacion en Adelanto LGRDocumento8 páginasCompensacion en Adelanto LGRMijhael FernandezAún no hay calificaciones
- INFORME DE Estado de Gas IdealDocumento13 páginasINFORME DE Estado de Gas IdealRUDDY CONDORI MAMANIAún no hay calificaciones
- Sistemas Control Segundo OrdenDocumento6 páginasSistemas Control Segundo OrdenFrancisco LucioAún no hay calificaciones
- Grupo 39 Fase 3Documento19 páginasGrupo 39 Fase 3jhon alexander yasno saenzAún no hay calificaciones
- Señales de PruebaDocumento8 páginasSeñales de PruebaecalderoncomtelingerAún no hay calificaciones
- Informefinalexp 2Documento8 páginasInformefinalexp 2Gabriela MoralesAún no hay calificaciones
- Fase 2 Identificar El Escenario y Analizar La EstabilidadDocumento11 páginasFase 2 Identificar El Escenario y Analizar La EstabilidadNaimer Urango BanquethAún no hay calificaciones
- Tutorial Control PIDocumento17 páginasTutorial Control PItito1513Aún no hay calificaciones
- Guia de Laboratorio # 06Documento7 páginasGuia de Laboratorio # 06César Jesús AlcaláAún no hay calificaciones
- Practica 3Documento6 páginasPractica 3Noc DgAún no hay calificaciones
- Tarea2 Grupo54.Documento46 páginasTarea2 Grupo54.Andrés TabordaAún no hay calificaciones
- 3-Divide y Venceras PDFDocumento62 páginas3-Divide y Venceras PDFAlder Friederich Yacila EspinozaAún no hay calificaciones
- Solución Examen de Sistemas de Segundo OrdenDocumento8 páginasSolución Examen de Sistemas de Segundo OrdenJuan Carlos FigueraAún no hay calificaciones
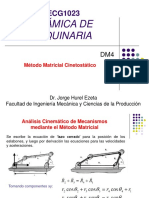
- Clase DM4Documento32 páginasClase DM4ByronAún no hay calificaciones
- Respuesta Transitoria 1-2021Documento27 páginasRespuesta Transitoria 1-2021Elkin Bedoya VásquezAún no hay calificaciones
- Primera Practica Ciii 2021Documento54 páginasPrimera Practica Ciii 2021manuelAún no hay calificaciones
- Informe Final N2-Controlador PIDDocumento10 páginasInforme Final N2-Controlador PIDMichael Infantes HuacancaAún no hay calificaciones
- Informe#5 HDocumento6 páginasInforme#5 HIZABELLA CHRISTINA SANTOS DA SILVAAún no hay calificaciones
- Metodos de Nivelacion de RecursosDocumento5 páginasMetodos de Nivelacion de RecursosHarold Ocampo0% (1)
- Fase 1 - Luis CastillaDocumento21 páginasFase 1 - Luis CastillaalbertoAún no hay calificaciones
- Freddyortiz Tarea1Documento19 páginasFreddyortiz Tarea1Jonathan Lozano CastilloAún no hay calificaciones
- Fase 2 Marcos NievesDocumento13 páginasFase 2 Marcos NievesRoberto SierraAún no hay calificaciones
- Tema 03 - Concepto de Corriente Alterna, Amplitud, Periodo, Frec, Fase y DesfaseDocumento20 páginasTema 03 - Concepto de Corriente Alterna, Amplitud, Periodo, Frec, Fase y Desfasedanicctv2elAún no hay calificaciones
- Informe N°1 de Comunicacion Digital OficialDocumento27 páginasInforme N°1 de Comunicacion Digital OficialDiego FloresAún no hay calificaciones
- Practica3 PDFDocumento12 páginasPractica3 PDFalfredokpuAún no hay calificaciones
- Modelado de Sistemas de Control DigitalDocumento58 páginasModelado de Sistemas de Control DigitalWalter Ruiz PorrasAún no hay calificaciones
- Práctica 4 - Respuesta TransitoriaDocumento4 páginasPráctica 4 - Respuesta TransitoriaKevin Ascue ContrerasAún no hay calificaciones
- Fase3 Andres OrtizDocumento6 páginasFase3 Andres OrtizALEX DORRIAN LOPEZ RODRIGUEZAún no hay calificaciones
- 03 Respuesta Transitoria x3Documento16 páginas03 Respuesta Transitoria x3neoflashAún no hay calificaciones
- Sintonización de Controladores PIDDocumento45 páginasSintonización de Controladores PIDluisAún no hay calificaciones
- 2 Colaborativo - Fase 5Documento17 páginas2 Colaborativo - Fase 5Jhon CaroAún no hay calificaciones
- Bibliografía Controladores-Estabilidad - v4Documento28 páginasBibliografía Controladores-Estabilidad - v4Laura CoderchAún no hay calificaciones
- TAREA 1 - Señales y SistemasDocumento28 páginasTAREA 1 - Señales y Sistemascristian camilo contreras diaz100% (1)
- Tarea 2Documento2 páginasTarea 2numbvichoAún no hay calificaciones
- Taller 4 2021 3 ICIPEVDocumento10 páginasTaller 4 2021 3 ICIPEVJohanAún no hay calificaciones
- Taller de Métodos Numéricos Aplicados A La Ingeniería de PetróleoDocumento11 páginasTaller de Métodos Numéricos Aplicados A La Ingeniería de PetróleoDavid Felipe Marin TorresAún no hay calificaciones
- C1 S1 2021 230041 PautaDocumento3 páginasC1 S1 2021 230041 PautaMarco QMAún no hay calificaciones
- Introducción A La Programación Dinámica EstocásticaDocumento15 páginasIntroducción A La Programación Dinámica EstocásticaDIEGO GONZALO FERNANDEZ SANCHEZAún no hay calificaciones
- Informe N°1 de Comunicacion Digital OficialDocumento28 páginasInforme N°1 de Comunicacion Digital OficialDiego FloresAún no hay calificaciones
- ANTISISMICADocumento19 páginasANTISISMICARomina Espinoza ContrerasAún no hay calificaciones
- 0.2 Funcion Real de Una Variable Real (Trascendente)Documento46 páginas0.2 Funcion Real de Una Variable Real (Trascendente)ashleykcamarenaAún no hay calificaciones
- Sistemas 1er2do Orden Ejercicios ResueltosDocumento10 páginasSistemas 1er2do Orden Ejercicios ResueltosOrlando Pérez Vargas50% (2)
- DSP Guia 6 Operaciones Con Funciones Discretas Con MATLABDocumento6 páginasDSP Guia 6 Operaciones Con Funciones Discretas Con MATLABJhonattan PortugalAún no hay calificaciones
- 05 Ejercicios de Primer Orden Imagen AnxaDocumento11 páginas05 Ejercicios de Primer Orden Imagen AnxaOmar Asr AlejandroAún no hay calificaciones
- Olimpiada Experimental Fisica 2005 EspañaDocumento5 páginasOlimpiada Experimental Fisica 2005 EspañaRobert MayAún no hay calificaciones
- Pendulo Simple 1 PDFDocumento10 páginasPendulo Simple 1 PDFmariaAún no hay calificaciones
- Guia Lab 06 CI 2021Documento11 páginasGuia Lab 06 CI 2021Diego Fernandez ArteagaAún no hay calificaciones
- Ejercicios TX La PlaceDocumento3 páginasEjercicios TX La PlaceDiego Fernandez ArteagaAún no hay calificaciones
- Guia02B Electrónica de Potencia 2022Documento2 páginasGuia02B Electrónica de Potencia 2022Diego Fernandez ArteagaAún no hay calificaciones
- Practica 4 Fase 3Documento4 páginasPractica 4 Fase 3Diego Fernandez ArteagaAún no hay calificaciones
- Guia10 PolarizaciónDeOndasElectromagnéticasDocumento16 páginasGuia10 PolarizaciónDeOndasElectromagnéticasDiego Fernandez ArteagaAún no hay calificaciones
- Caratula FormatoDocumento2 páginasCaratula FormatoDiego Fernandez ArteagaAún no hay calificaciones
- Práctica 2 2020 (1) - Casi TerminadoDocumento8 páginasPráctica 2 2020 (1) - Casi TerminadoDiego Fernandez ArteagaAún no hay calificaciones
- Segunda Practica CiiiDocumento6 páginasSegunda Practica CiiiDiego Fernandez ArteagaAún no hay calificaciones
- Lab01 CIII GarciaVelaaDocumento23 páginasLab01 CIII GarciaVelaaDiego Fernandez ArteagaAún no hay calificaciones
- Diana - Rcom SateDocumento6 páginasDiana - Rcom SateDiego Fernandez ArteagaAún no hay calificaciones
- Guia06 Circuitos Electrónicos 1 2021Documento2 páginasGuia06 Circuitos Electrónicos 1 2021Diego Fernandez ArteagaAún no hay calificaciones
- Guia2 DireccionamientoIP - Avance FernandezArteagaDocumento14 páginasGuia2 DireccionamientoIP - Avance FernandezArteagaDiego Fernandez ArteagaAún no hay calificaciones
- Guia2 DireccionamientoIPDocumento16 páginasGuia2 DireccionamientoIPDiego Fernandez ArteagaAún no hay calificaciones
- Sesion 001 1Documento28 páginasSesion 001 1Diego Fernandez ArteagaAún no hay calificaciones
- FinalPractica 1 Neira Sisa EdyyDocumento33 páginasFinalPractica 1 Neira Sisa EdyyDiego Fernandez ArteagaAún no hay calificaciones
- Guia1 HerramientasBasicasRedDocumento24 páginasGuia1 HerramientasBasicasRedDiego Fernandez ArteagaAún no hay calificaciones
- Guia2 DireccionamientoIPDocumento16 páginasGuia2 DireccionamientoIPDiego Fernandez ArteagaAún no hay calificaciones
- 07 - DiccionariosDocumento22 páginas07 - DiccionariosDiego Fernandez ArteagaAún no hay calificaciones
- Lista GRUPO 02 LAB TELE IIIDocumento1 páginaLista GRUPO 02 LAB TELE IIIDiego Fernandez ArteagaAún no hay calificaciones
- Lab07 AyS FernandezDDocumento25 páginasLab07 AyS FernandezDDiego Fernandez ArteagaAún no hay calificaciones
- 01 - Creación de Diagramas de FlujoDocumento36 páginas01 - Creación de Diagramas de FlujoJoe RosasAún no hay calificaciones
- Python Sesion 02Documento66 páginasPython Sesion 02Diego Fernandez ArteagaAún no hay calificaciones
- 04 - TuplasDocumento15 páginas04 - TuplasDiego Fernandez ArteagaAún no hay calificaciones
- La Afectacion de Los Celulares en Los Niños Menores de 12 AñosDocumento24 páginasLa Afectacion de Los Celulares en Los Niños Menores de 12 AñosCarolina JaramilloAún no hay calificaciones
- Comandos Básicos ADBDocumento7 páginasComandos Básicos ADBFelix Antonio CalderonAún no hay calificaciones
- Seguridad de La InformaciónDocumento16 páginasSeguridad de La InformacióntigrexczAún no hay calificaciones
- Creacion de UsuarioDocumento7 páginasCreacion de Usuariovasumitra 666Aún no hay calificaciones
- Cuestionario Repuesta Dela Semana1Documento2 páginasCuestionario Repuesta Dela Semana1Vanessa FloresAún no hay calificaciones
- MANUAL DE INSTRUCCIONES 15ppm Bilge Alarm OMDDocumento9 páginasMANUAL DE INSTRUCCIONES 15ppm Bilge Alarm OMDMantproca ComercioAún no hay calificaciones
- Cap 3A Minimizacion - Oto20Documento23 páginasCap 3A Minimizacion - Oto20elyssa perez zAún no hay calificaciones
- Informe de Gestión Octubre. Municipio SucreDocumento6 páginasInforme de Gestión Octubre. Municipio SucreEnrique GómezAún no hay calificaciones
- Tarea 1 - BAUTISTA CASTAÑEDA MANUEL AARONDocumento6 páginasTarea 1 - BAUTISTA CASTAÑEDA MANUEL AARONMANUEL AARON BAUTISTA CASTAÑEDAAún no hay calificaciones
- Casas Luyo Alexis Ricardo-Laboratorio N°2-MicroNano Sistemas Electrónicos-L12Documento25 páginasCasas Luyo Alexis Ricardo-Laboratorio N°2-MicroNano Sistemas Electrónicos-L12Alexis Casas LuyoAún no hay calificaciones
- Relevadores de Protección de Estado Sólido (E777)Documento20 páginasRelevadores de Protección de Estado Sólido (E777)junior_jazzzAún no hay calificaciones
- Despiece de Bomba Bombas WHT 53Documento2 páginasDespiece de Bomba Bombas WHT 53raulblondetAún no hay calificaciones
- Cuadro ComparativoDocumento3 páginasCuadro ComparativoMaria GomezAún no hay calificaciones
- ACTIVIDADESnDEnREFLEXInnNnINICIAL 625e8538ae4ba33Documento3 páginasACTIVIDADESnDEnREFLEXInnNnINICIAL 625e8538ae4ba33J.Zuluaga 18Aún no hay calificaciones
- Guia Circuitos Grado DecimoDocumento8 páginasGuia Circuitos Grado Decimoluis alejandro peña mateusAún no hay calificaciones
- Protocolo Individual Administracion de Suministros Unid 1Documento2 páginasProtocolo Individual Administracion de Suministros Unid 1Hostal Nieto MompoxAún no hay calificaciones
- Procedimiento de Calibracion Modulo SIWAREXDocumento6 páginasProcedimiento de Calibracion Modulo SIWAREXEdwin PuertoAún no hay calificaciones
- Guia de Trabajo Practico Criptografia PDFDocumento5 páginasGuia de Trabajo Practico Criptografia PDFWil FranAún no hay calificaciones
- 55-052 Releasing Module - En.esDocumento2 páginas55-052 Releasing Module - En.esLionel RamosAún no hay calificaciones
- Descubre Las Diferentes Herramientas de Word+Documento9 páginasDescubre Las Diferentes Herramientas de Word+Ysamar RosasAún no hay calificaciones
- Guia de Actividades y Rúbrica de Evaluación - Fase 3-Medir PDFDocumento8 páginasGuia de Actividades y Rúbrica de Evaluación - Fase 3-Medir PDFJuan Camilo Ospina BustamanteAún no hay calificaciones
- Lazarillo de Tormes BilingueDocumento11 páginasLazarillo de Tormes BilingueCristiane Agnes Stolet CorreiaAún no hay calificaciones
- 11° ZETI CESAR - Julian Losada MuñozDocumento7 páginas11° ZETI CESAR - Julian Losada MuñozJulian LosadaAún no hay calificaciones
- Proyecto Bibliotecas Virtuales - AnoríDocumento62 páginasProyecto Bibliotecas Virtuales - AnoríWilmer OrtizAún no hay calificaciones
- ACTIVIDAD 1 UNIDAD II Mapeo de ProcesosDocumento7 páginasACTIVIDAD 1 UNIDAD II Mapeo de ProcesosvaleriaAún no hay calificaciones
- Presentacion VDF S Emotron - Especificaciones GeneralesDocumento32 páginasPresentacion VDF S Emotron - Especificaciones Generalespablo caceresAún no hay calificaciones
- Evidencia 1Documento3 páginasEvidencia 1Víctor HuertaAún no hay calificaciones
- Creacion Implantacion Programas Mentoring InternoDocumento7 páginasCreacion Implantacion Programas Mentoring InternoDaniel BuenañoAún no hay calificaciones
- 6 - DFD (Repaso) y Diccionario de DatosDocumento16 páginas6 - DFD (Repaso) y Diccionario de DatosjeffersonAún no hay calificaciones
- Unidad 1. Marco Conceptual de Los Sistemas de Protección ElectrónicaDocumento15 páginasUnidad 1. Marco Conceptual de Los Sistemas de Protección ElectrónicaJimmy Mauricio Carvajal RodríguezAún no hay calificaciones