También podría gustarte
- Formulario de Transformada de LaplaceDocumento2 páginasFormulario de Transformada de LaplaceValdujaz Elfa100% (1)
- Ejercicio Elemento Finito Mediante MatlabDocumento5 páginasEjercicio Elemento Finito Mediante Matlabpepecruz33Aún no hay calificaciones
- A1 U32Documento4 páginasA1 U32Ángel MasGaAún no hay calificaciones
- Matriz 2Documento2 páginasMatriz 2Pedro Miguel Martínez GuerraAún no hay calificaciones
- Factorización de Cholesky Con R - RstudioDocumento3 páginasFactorización de Cholesky Con R - RstudiofermadAún no hay calificaciones
- Guía de Ejercicios N°1Documento4 páginasGuía de Ejercicios N°1Jose Luis Romero PerezAún no hay calificaciones
- Taller 4 FinalDocumento25 páginasTaller 4 FinalYomi GuerrónAún no hay calificaciones
- Analisis de La Posicion, Velocidad y Aceleracion Mecanismo de 4 Barras (MATLAB)Documento4 páginasAnalisis de La Posicion, Velocidad y Aceleracion Mecanismo de 4 Barras (MATLAB)jesus ferrerAún no hay calificaciones
- Regla de Sarrus, Adjunta de Una Matríz y Su Inversa PDFDocumento14 páginasRegla de Sarrus, Adjunta de Una Matríz y Su Inversa PDFSantiago GarcíaAún no hay calificaciones
- Ejercicios de Logaritmos31Documento1 páginaEjercicios de Logaritmos31Raül Meló VidalAún no hay calificaciones
- Ejercicios de Conjuntos Numericos PDFDocumento4 páginasEjercicios de Conjuntos Numericos PDFEduardo Andres Alarcon ZuñigaAún no hay calificaciones
- Prova Tecnico de QualidadeDocumento11 páginasProva Tecnico de QualidadeGILSON SANTOSAún no hay calificaciones
- Solucion Practica Semana 8Documento9 páginasSolucion Practica Semana 8Giancarlo Torres BringasAún no hay calificaciones
- Sem-03 Matematica Aplicada A La Fisica I 3roDocumento3 páginasSem-03 Matematica Aplicada A La Fisica I 3rokimtumbajulcasanchezAún no hay calificaciones
- Algoritmo Matlab de Un Sistema de PendulosDocumento14 páginasAlgoritmo Matlab de Un Sistema de PendulosFIDEL TOMAS MONTEZA ZEVALLOS100% (4)
- BalancesDocumento3 páginasBalancesMischel Pamela Cardenas LopezAún no hay calificaciones
- Justificación (Comprobación) MATRIZ MatlabDocumento3 páginasJustificación (Comprobación) MATRIZ MatlabHANNIA IVETTE NAVARRO ROBLEDOAún no hay calificaciones
- Ejercicios LogaritmosDocumento10 páginasEjercicios LogaritmosOsvaldo Lagos ValeriaAún no hay calificaciones
- Ejercicios de LogaritmosDocumento1 páginaEjercicios de LogaritmosCarlos Andrés ValverdeAún no hay calificaciones
- Robotica T6Documento4 páginasRobotica T6Rodrigo Robledo CastilloAún no hay calificaciones
- TAREA 1 (Leos Santiago Ivan, Romero Barrientos Miguel Angel)Documento6 páginasTAREA 1 (Leos Santiago Ivan, Romero Barrientos Miguel Angel)jarcAún no hay calificaciones
- Tutorial 7Documento8 páginasTutorial 7anani quispeAún no hay calificaciones
- AEOE Lec Notes 5Documento27 páginasAEOE Lec Notes 5Jean Marco Martinez AguirreAún no hay calificaciones
- Practica 3 EfgDocumento6 páginasPractica 3 Efgisabel blanco ibarraAún no hay calificaciones
- Logar It MosDocumento10 páginasLogar It MosVictor Carrion ManuelAún no hay calificaciones
- Logar It MosDocumento10 páginasLogar It MosMario Alfonso Peña ArancibiaAún no hay calificaciones
- Mecanismo 6 BarrasDocumento2 páginasMecanismo 6 BarrasEsteban PalaciosAún no hay calificaciones
- Chino Niños 4Documento108 páginasChino Niños 4Laura RDAún no hay calificaciones
- Taller 5 Estadistica TerminadoDocumento28 páginasTaller 5 Estadistica TerminadoJuan Manuel ZapataAún no hay calificaciones
- Ejercicios Shirley Fernanda CórdobaDocumento10 páginasEjercicios Shirley Fernanda Córdobashirley cordovaAún no hay calificaciones
- Prácticas Cálculo Financiero Nociones FundamentalesDocumento5 páginasPrácticas Cálculo Financiero Nociones FundamentalesalonsomtAún no hay calificaciones
- Lab 02 - Robótica - Kcana - GutierrezDocumento13 páginasLab 02 - Robótica - Kcana - GutierrezEDISSON ALFREDO GUTIERREZ OPPEAún no hay calificaciones
- Practica 2Documento10 páginasPractica 2Mc DacronerAún no hay calificaciones
- Entidades Primitivas para El Desarrollo de AlgoritmosDocumento14 páginasEntidades Primitivas para El Desarrollo de AlgoritmosSantiago zuritaAún no hay calificaciones
- Estadística Descriptiva para Datos Agrupados Clase#2Documento13 páginasEstadística Descriptiva para Datos Agrupados Clase#2Vladimir GarciaAún no hay calificaciones
- Aproximacion Funcional e InterpolacionDocumento4 páginasAproximacion Funcional e InterpolacionMiguel Perez SanchesAún no hay calificaciones
- Lab II Lab 1 Ley de OhmDocumento11 páginasLab II Lab 1 Ley de Ohmnivek12Aún no hay calificaciones
- Ejercicios Electrotecnia - 202038238Documento35 páginasEjercicios Electrotecnia - 202038238Eduardo GómezAún no hay calificaciones
- Oscilador de Van Der PolDocumento11 páginasOscilador de Van Der PolgarciaramirezalanraiAún no hay calificaciones
- Tarea 11 CDocumento9 páginasTarea 11 CVidal Tello lopezAún no hay calificaciones
- Prueba Weibull GraficosDocumento4 páginasPrueba Weibull GraficosMartin.c.figueroaAún no hay calificaciones
- Practica 3 MRUVDocumento12 páginasPractica 3 MRUVGriscel SagñayAún no hay calificaciones
- Ejercicio MecanismosDocumento3 páginasEjercicio MecanismosJosé Ávila BAún no hay calificaciones
- Pando - 2Documento43 páginasPando - 2LORENA JAZMIN PANDO ESPINOZAAún no hay calificaciones
- Solucionario Practica Series 1Documento6 páginasSolucionario Practica Series 1Christian David N.Aún no hay calificaciones
- Solucion Taller 06pdfDocumento3 páginasSolucion Taller 06pdfJavier Andres Gonzales RodriguesAún no hay calificaciones
- UNIFAC 3componentesDocumento7 páginasUNIFAC 3componentesAmner Rudhy Fonseca TelloAún no hay calificaciones
- Solucion Taller 06pdfDocumento3 páginasSolucion Taller 06pdfJorge Fernando Angeles CrespiAún no hay calificaciones
- Solucion Taller 06pdfDocumento3 páginasSolucion Taller 06pdfMaicol Godoy SeasAún no hay calificaciones
- Solucion - Taller 06 PDFDocumento3 páginasSolucion - Taller 06 PDFMelissa Vilca0% (1)
- SolucionDocumento3 páginasSolucionJavier Andres Gonzales Rodrigues67% (3)
- Solucion Taller 06pdf 1 PDFDocumento3 páginasSolucion Taller 06pdf 1 PDFFrancescoli ChiroqueAún no hay calificaciones
- Solucion 21Documento3 páginasSolucion 21Javier Andres Gonzales RodriguesAún no hay calificaciones
- Lab 02 RoboticaDocumento10 páginasLab 02 RoboticaSteven Dave QRAún no hay calificaciones
- LogaritmosDocumento24 páginasLogaritmosmartin 80Aún no hay calificaciones
- Navegacion Astronomica en PythonDocumento44 páginasNavegacion Astronomica en PythoncapitanezAún no hay calificaciones
- Tarea 2. Segundo ParcialDocumento10 páginasTarea 2. Segundo ParcialTorres RodriguezAún no hay calificaciones
- Practica N5 - DsraDocumento18 páginasPractica N5 - DsraLuis Hugo Avalos AuroraAún no hay calificaciones
- Prueba 2b Aragon y SeguraDocumento4 páginasPrueba 2b Aragon y SeguraChris SeguraAún no hay calificaciones
- Consulta Produccion 4Documento24 páginasConsulta Produccion 4Chris SeguraAún no hay calificaciones
- Informe ElectricidadDocumento7 páginasInforme ElectricidadChris SeguraAún no hay calificaciones
- Grafcet Ejercicio - 2Documento2 páginasGrafcet Ejercicio - 2Chris SeguraAún no hay calificaciones
- Consult A Pro Ducci On 3Documento28 páginasConsult A Pro Ducci On 3Chris SeguraAún no hay calificaciones
- Informe #1 Ii Bimestre Pumisacho GisselaDocumento11 páginasInforme #1 Ii Bimestre Pumisacho GisselaChris SeguraAún no hay calificaciones
- Consulta Produccion 2Documento22 páginasConsulta Produccion 2Chris SeguraAún no hay calificaciones
- Formulario Ingeniería Económica Capítulo1 Capítulo4Documento1 páginaFormulario Ingeniería Económica Capítulo1 Capítulo4Chris SeguraAún no hay calificaciones
- Informacion Proyecto 2 BimDocumento2 páginasInformacion Proyecto 2 BimChris SeguraAún no hay calificaciones
- Resolución Actividad II-5Documento8 páginasResolución Actividad II-5Chris SeguraAún no hay calificaciones
- Datos y Grafica FinalDocumento3 páginasDatos y Grafica FinalChris SeguraAún no hay calificaciones
- Historia Informe de La Revolucion NeoliticaDocumento3 páginasHistoria Informe de La Revolucion NeoliticaChris SeguraAún no hay calificaciones
- Informe de CAMCNCDocumento13 páginasInforme de CAMCNCChris SeguraAún no hay calificaciones
- Mapa de ProcesosDocumento1 páginaMapa de ProcesosChris SeguraAún no hay calificaciones
- Actividad II-1 - Ejercicio EnsuciamientoDocumento2 páginasActividad II-1 - Ejercicio EnsuciamientoChris SeguraAún no hay calificaciones
- Resultado de Velocidades en AutocadDocumento2 páginasResultado de Velocidades en AutocadChris SeguraAún no hay calificaciones
- CSegura 1Documento5 páginasCSegura 1Chris SeguraAún no hay calificaciones
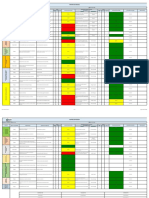
- Matriz de RiesgosDocumento2 páginasMatriz de RiesgosChris SeguraAún no hay calificaciones
- Escuela Politecnica NacionalDocumento2 páginasEscuela Politecnica NacionalChris SeguraAún no hay calificaciones
- Tranfer 1Documento3 páginasTranfer 1Chris SeguraAún no hay calificaciones
- Datos y GraficaDocumento3 páginasDatos y GraficaChris SeguraAún no hay calificaciones
- Clase 17-Diagramas de Fase Fe-Fe3CDocumento29 páginasClase 17-Diagramas de Fase Fe-Fe3CChris SeguraAún no hay calificaciones
- Informe 4 Elementos CapacitivosDocumento3 páginasInforme 4 Elementos CapacitivosChris Segura0% (1)
- CinemáticaDocumento4 páginasCinemáticaChris SeguraAún no hay calificaciones
- CONCLUSIONES PolarizacionDocumento1 páginaCONCLUSIONES PolarizacionChris SeguraAún no hay calificaciones
- Trabajo - Diagramas de FaseDocumento4 páginasTrabajo - Diagramas de FaseChris SeguraAún no hay calificaciones