También podría gustarte
- 02.estructuras Algebraicas y Sistemas Numericos VFDocumento24 páginas02.estructuras Algebraicas y Sistemas Numericos VFDussan PalmaAún no hay calificaciones
- Clase7 - Axiomas Num Reales - EcuacionesDocumento42 páginasClase7 - Axiomas Num Reales - EcuacionesJose DiegoAún no hay calificaciones
- Unidad 1Documento36 páginasUnidad 1brisaAún no hay calificaciones
- Clase7 Axiomas Num Reales Ecuaciones 2023Documento46 páginasClase7 Axiomas Num Reales Ecuaciones 2023Juan Yoel Mamani ZapanaAún no hay calificaciones
- Álgebra Lineal 1Documento36 páginasÁlgebra Lineal 1Alex VillanuevaAún no hay calificaciones
- Algebra Lineal 1Documento8 páginasAlgebra Lineal 1Osmar BogadoAún no hay calificaciones
- Integral de Riemann-StieltjesDocumento21 páginasIntegral de Riemann-StieltjesmoisesAún no hay calificaciones
- Número RealesDocumento27 páginasNúmero RealesAngel MikiAún no hay calificaciones
- Resumen Álgebra I Final PDFDocumento15 páginasResumen Álgebra I Final PDFTomas KancyperAún no hay calificaciones
- Ejericios, Algebra LinealDocumento2 páginasEjericios, Algebra LinealIngrid Pamela B. SandovalAún no hay calificaciones
- Parte 1 Calculo DiferencialDocumento49 páginasParte 1 Calculo Diferencialjuancarlos0406100% (1)
- Primer Trabajo de TopologíaDocumento11 páginasPrimer Trabajo de TopologíaLuis Enmanuel Velásquez ChavarríaAún no hay calificaciones
- Unidad 1 Números RealesDocumento10 páginasUnidad 1 Números RealesMicaela MartinezAún no hay calificaciones
- Grupo y AnilloDocumento12 páginasGrupo y AnilloDulcelina ZamoraAún no hay calificaciones
- Espacios VectorialesDocumento29 páginasEspacios VectorialesGiselle RosasAún no hay calificaciones
- CONSTRUCCION DE LOS NUMEROS RACIONALES CasiDocumento10 páginasCONSTRUCCION DE LOS NUMEROS RACIONALES CasiIngmar Vivanco EchaccayaAún no hay calificaciones
- CONTENIDO CLASE Nro 35Documento8 páginasCONTENIDO CLASE Nro 35Adriàn GuerreroAún no hay calificaciones
- 1 TALLER 1 Conjunto de Los Números Naturales (N) y Conjunto de Los Números Enteros (Z)Documento9 páginas1 TALLER 1 Conjunto de Los Números Naturales (N) y Conjunto de Los Números Enteros (Z)ELIZABETH . HERRERA ORMENOAún no hay calificaciones
- Ejercicios-Analisis Matemático. Alferedo Sánchez AlbercaDocumento157 páginasEjercicios-Analisis Matemático. Alferedo Sánchez AlbercaAna LópezAún no hay calificaciones
- Números RealesDocumento27 páginasNúmeros RealesMilagros Hidalgo torresAún no hay calificaciones
- Capítulo 01 - El Cuerpo de Los Números RealesDocumento12 páginasCapítulo 01 - El Cuerpo de Los Números RealesLuis JácomeAún no hay calificaciones
- MAT1101PIW2Documento53 páginasMAT1101PIW2Geovanny RamosAún no hay calificaciones
- Matemática para Nuevo Ingreso UESDocumento104 páginasMatemática para Nuevo Ingreso UESELI VENTURAAún no hay calificaciones
- USB Matemáticas VI-Clases Tópico #3Documento11 páginasUSB Matemáticas VI-Clases Tópico #3windarAún no hay calificaciones
- Convergencia AceleradaDocumento3 páginasConvergencia AceleradabryggyttAún no hay calificaciones
- SeriesDocumento23 páginasSerieschupamelapijaAún no hay calificaciones
- Modulo 1 SucesionesDocumento10 páginasModulo 1 SucesionesFrancisco Pérez ValenciaAún no hay calificaciones
- Resumen AlgebraDocumento46 páginasResumen AlgebraFdeAún no hay calificaciones
- ÁLGEBRA Y GEOMETRÍA II Espacios VectorialesDocumento48 páginasÁLGEBRA Y GEOMETRÍA II Espacios VectorialesFran ParrottaAún no hay calificaciones
- Mate Axiomas Alg CalDocumento6 páginasMate Axiomas Alg CalMilka Rios AvendañoAún no hay calificaciones
- Tarea #3. Transformada de Laplace Directa e InversaDocumento8 páginasTarea #3. Transformada de Laplace Directa e InversaDaniel Larios100% (1)
- Capitulo 1 - Conjuntos ConvexosDocumento5 páginasCapitulo 1 - Conjuntos ConvexosCristhianRosadioAranibarAún no hay calificaciones
- Estructuras AlgebraicasDocumento6 páginasEstructuras AlgebraicasElíasMauricioEspínolaAún no hay calificaciones
- Definición Geométrica.-: FuncionesDocumento4 páginasDefinición Geométrica.-: FuncionesJorge LavaresAún no hay calificaciones
- Semigrupos Monoides y GruposDocumento36 páginasSemigrupos Monoides y GruposCarlos HallAún no hay calificaciones
- Material de Apoyo de ÁlgebraDocumento21 páginasMaterial de Apoyo de ÁlgebraJohn Da RosaAún no hay calificaciones
- Clases Funciones-Def-Dom y Rang-Funcs Espec-2 ColumnasDocumento4 páginasClases Funciones-Def-Dom y Rang-Funcs Espec-2 ColumnasPedro LeonAún no hay calificaciones
- Plantilla Arreglar FancyDocumento10 páginasPlantilla Arreglar FancyCamilo SanabriaAún no hay calificaciones
- Clase 4Documento12 páginasClase 4Fran PushAún no hay calificaciones
- Unidad No. 1 Sucesiones y Límites de SucesionesDocumento26 páginasUnidad No. 1 Sucesiones y Límites de Sucesionesdiazmorillohumarandres8Aún no hay calificaciones
- Axiomas RealesDocumento6 páginasAxiomas Realesroberto jonesAún no hay calificaciones
- Funciones Trascendentes - Exponencial 2BGUDocumento8 páginasFunciones Trascendentes - Exponencial 2BGUJoelAún no hay calificaciones
- Mamt2 U3 A2 LapbDocumento9 páginasMamt2 U3 A2 LapbLaura Pontón BecerrilAún no hay calificaciones
- Examen 1Documento5 páginasExamen 1Karla Violeta Ruiz VargasAún no hay calificaciones
- TEMA2Documento57 páginasTEMA2Juan FcoAún no hay calificaciones
- Tema 3 - Integral DefinidaDocumento12 páginasTema 3 - Integral Definidaxiomara medinaAún no hay calificaciones
- Teoria Semana 1Documento6 páginasTeoria Semana 1Dayana MGAún no hay calificaciones
- Semana VDocumento3 páginasSemana VangelAún no hay calificaciones
- Tema 1 - Números NaturalesDocumento2 páginasTema 1 - Números NaturalesjsanchezAún no hay calificaciones
- Mamt2 U2 Ea RaicDocumento7 páginasMamt2 U2 Ea RaicRaúl SánchezAún no hay calificaciones
- Unidad 1,2,3 Calculo IDocumento35 páginasUnidad 1,2,3 Calculo IFaker ExoAún no hay calificaciones
- 03 Pizarra de ClasesDocumento5 páginas03 Pizarra de ClaseslupitaAún no hay calificaciones
- Hoy Parcial de Algebra ModernaDocumento6 páginasHoy Parcial de Algebra ModernaJesús SaurithAún no hay calificaciones
- Números ComplejosDocumento19 páginasNúmeros ComplejosLucas PeraltaAún no hay calificaciones
- FuncionesDocumento16 páginasFuncionesFrank Huamani RomeroAún no hay calificaciones
- UposDocumento5 páginasUposWatermelon RuanAún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
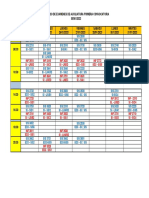
- 2da Convocatoria Auxiliaturas SEM 1 2023Documento4 páginas2da Convocatoria Auxiliaturas SEM 1 2023Condarco ChoqueAún no hay calificaciones
- Lista y Números de Auxiliares Sis-Inf 1-2023Documento2 páginasLista y Números de Auxiliares Sis-Inf 1-2023Condarco ChoqueAún no hay calificaciones
- Instructivo 004 Limpieza CarreraDocumento3 páginasInstructivo 004 Limpieza CarreraCondarco ChoqueAún no hay calificaciones
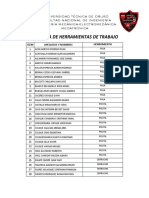
- Lista de Herramientas de TrabajoDocumento3 páginasLista de Herramientas de TrabajoCondarco ChoqueAún no hay calificaciones
- Mat 1101 B Cap II-1-4Documento4 páginasMat 1101 B Cap II-1-4Condarco ChoqueAún no hay calificaciones
- Repaso Materia y EnergíaDocumento28 páginasRepaso Materia y EnergíaCondarco ChoqueAún no hay calificaciones
- Carta Auxiliatura MAT1135Documento1 páginaCarta Auxiliatura MAT1135Condarco Choque100% (1)
- Convocatoria Auxiliaturas-SEM-1-2023Documento6 páginasConvocatoria Auxiliaturas-SEM-1-2023Erick Hans Viraca ChoqueticllaAún no hay calificaciones
- DoolittleDocumento2 páginasDoolittleCondarco ChoqueAún no hay calificaciones
- ESTRUCTURA ATÓMICA Parte 1Documento24 páginasESTRUCTURA ATÓMICA Parte 1Condarco ChoqueAún no hay calificaciones
- MAT 1102 Tema1Documento22 páginasMAT 1102 Tema1Sebastián ColqueAún no hay calificaciones
- Carta de AuxiliaturaDocumento1 páginaCarta de AuxiliaturaCondarco ChoqueAún no hay calificaciones
- Clase VirtualDocumento3 páginasClase VirtualCondarco ChoqueAún no hay calificaciones
- Horario Tribunales Aux 1-2023Documento2 páginasHorario Tribunales Aux 1-2023Condarco ChoqueAún no hay calificaciones
- Formula Rio 3Documento2 páginasFormula Rio 3Condarco ChoqueAún no hay calificaciones
- Espacios TopologicosDocumento10 páginasEspacios TopologicosEstebanParedesAún no hay calificaciones
- 10 Ecuaciones de Primer Grado de SecundariaDocumento22 páginas10 Ecuaciones de Primer Grado de SecundariaRoyer Rodriguez AguilarAún no hay calificaciones
- Razón Aritmética y Geométrica.Documento7 páginasRazón Aritmética y Geométrica.Javier perdomoAún no hay calificaciones
- Aritmética 2018 - 3ºDocumento180 páginasAritmética 2018 - 3ºLENIN GAMARRAAún no hay calificaciones
- Guia para Docentes Matematicas 2 - Tema 8 - MultiplicacionDocumento34 páginasGuia para Docentes Matematicas 2 - Tema 8 - MultiplicacionvivianaarbAún no hay calificaciones
- Aplicaciones de La Derivada.Documento6 páginasAplicaciones de La Derivada.Erandy Jazmín Lopez VázquezAún no hay calificaciones
- Infografia de Los NumerosDocumento1 páginaInfografia de Los NumerosMichelle PetoAún no hay calificaciones
- Determinar Los Flujos de Potencia Del Sistema Aplicando NR para La Quinta IteraciónDocumento18 páginasDeterminar Los Flujos de Potencia Del Sistema Aplicando NR para La Quinta IteraciónChristian SánchezAún no hay calificaciones
- Relacion Entre Ecuaciones Diferenciales Totales y La Regla de La CadenaDocumento7 páginasRelacion Entre Ecuaciones Diferenciales Totales y La Regla de La CadenaYessenia GallardoAún no hay calificaciones
- Mini Ensayo 1Documento9 páginasMini Ensayo 1Ernesto Carlos OlavarriaAún no hay calificaciones
- X Sem21Documento8 páginasX Sem21antonioAún no hay calificaciones
- Práctica Individual Unidad II (Conjuntos) Razonamiento Matemático I - Septiembre 2019Documento8 páginasPráctica Individual Unidad II (Conjuntos) Razonamiento Matemático I - Septiembre 2019Nahomi MañonAún no hay calificaciones
- Ejer Teo Ec - Diferenciales Calculo 3Documento25 páginasEjer Teo Ec - Diferenciales Calculo 3JorgeAún no hay calificaciones
- MATHEMATICS SHORT TESTS 1st YEAR 2008 3Documento16 páginasMATHEMATICS SHORT TESTS 1st YEAR 2008 3WillyOlayaAún no hay calificaciones
- InfografíaDocumento1 páginaInfografíaCarlos RozoAún no hay calificaciones
- Concavidad y Punto de InfleccióDocumento10 páginasConcavidad y Punto de InfleccióyolatlAún no hay calificaciones
- Ejer Cici Os 1 Er ParcialDocumento4 páginasEjer Cici Os 1 Er ParcialRichard Pastor HernandezAún no hay calificaciones
- Reglas Importantes para Resolver Operaciones AritméticasDocumento8 páginasReglas Importantes para Resolver Operaciones Aritméticasalexanderlona20Aún no hay calificaciones
- Lugar Geometrico de Las RaicesDocumento15 páginasLugar Geometrico de Las RaicesCristian Arce RomeroAún no hay calificaciones
- Teoria Preliminar de Las Ecuaciones DiferencialesDocumento3 páginasTeoria Preliminar de Las Ecuaciones DiferencialesisaenitAún no hay calificaciones
- Calculo Integral Letra BDocumento6 páginasCalculo Integral Letra Bedgar armando marinAún no hay calificaciones
- Razonamiento MatematicoDocumento5 páginasRazonamiento MatematicoGerson Cruz FloresAún no hay calificaciones
- Cyepeslara10° CONDUCTA DE ENTRADADocumento5 páginasCyepeslara10° CONDUCTA DE ENTRADAMathyelarAún no hay calificaciones
- Divergencia y Rotacional Tarea .Documento5 páginasDivergencia y Rotacional Tarea .Alan SamuelAún no hay calificaciones
- Guía 2 Cálculo Integral UDD 2023-1Documento4 páginasGuía 2 Cálculo Integral UDD 2023-1Bastián EhrenfeldAún no hay calificaciones
- Guía #4.2 - Funciones RacionalesDocumento7 páginasGuía #4.2 - Funciones RacionalesMedina VeroAún no hay calificaciones
- Tarea de Funciones TrascendentesDocumento5 páginasTarea de Funciones TrascendentesLuis FvvAún no hay calificaciones
- Mapa DerivadasDocumento3 páginasMapa DerivadasOscar Dario PORTILLO MESTRAAún no hay calificaciones
- Clase 10Documento17 páginasClase 10thaake Martín Matus LisboaAún no hay calificaciones
- Calculo IIIDocumento11 páginasCalculo IIImilicorazonAún no hay calificaciones