También podría gustarte
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- 04.sistema de Ecuacion LinealDocumento30 páginas04.sistema de Ecuacion LinealFernando MarticorenaAún no hay calificaciones
- Teoría de Sistemas de Ecuaciones Lineales - 2020Documento10 páginasTeoría de Sistemas de Ecuaciones Lineales - 2020mateoromitiAún no hay calificaciones
- Sist Ecuac-Matrices1Documento25 páginasSist Ecuac-Matrices1AliceMSànchezRAún no hay calificaciones
- CAPÍTULO 4 SISTEMAS DE ECUACIONES LINEALESDocumento38 páginasCAPÍTULO 4 SISTEMAS DE ECUACIONES LINEALESFranco AgustínAún no hay calificaciones
- Algebra 01-04Documento4 páginasAlgebra 01-04Jurguen ZambranoAún no hay calificaciones
- SISTEMADEECUACIONESDocumento40 páginasSISTEMADEECUACIONESAngel LealAún no hay calificaciones
- Sistema de Ecc. 2x2-YumpeDocumento10 páginasSistema de Ecc. 2x2-YumpeMiguel IntiAún no hay calificaciones
- Actividad 2 Algebra LinealDocumento14 páginasActividad 2 Algebra LinealHugo PeñaAún no hay calificaciones
- U NIDAD+N1Documento57 páginasU NIDAD+N1Juan Antonio BustamanteAún no hay calificaciones
- Material Imprimible Unidad 4Documento25 páginasMaterial Imprimible Unidad 4noelia duré0% (1)
- 4.1.2 Sistemas de Ecuacuiones Diferenciales Lineales HomogéneosDocumento8 páginas4.1.2 Sistemas de Ecuacuiones Diferenciales Lineales HomogéneosHEINIIZ PETRYAún no hay calificaciones
- Algebra Lineal Curso CompletoDocumento126 páginasAlgebra Lineal Curso CompletoVanesa RodriguezAún no hay calificaciones
- Unidad 1Documento7 páginasUnidad 1francogonzalez4230Aún no hay calificaciones
- Apunte-1 Modulo Sistemas de Ecuaciones Nm2 Mat1 5Documento4 páginasApunte-1 Modulo Sistemas de Ecuaciones Nm2 Mat1 5Juanjo TroncosoAún no hay calificaciones
- EcualinDocumento9 páginasEcualinDavid Gastelo ChozzoAún no hay calificaciones
- Guia Pedagogica de EcuacionesDocumento17 páginasGuia Pedagogica de EcuacionesFernando BetancourtAún no hay calificaciones
- Sistemas Ecs LDocumento26 páginasSistemas Ecs LMarckuz MendietaAún no hay calificaciones
- Métodos numéricos para la solución de sistemas de ecuaciones algebraicas linealesDocumento41 páginasMétodos numéricos para la solución de sistemas de ecuaciones algebraicas linealesJose SosaAún no hay calificaciones
- Sistemas de Ecuaciones Lineales y MatricDocumento34 páginasSistemas de Ecuaciones Lineales y MatricJHONATAN SNEIDER GALEANO ALMANZAAún no hay calificaciones
- EDO AplicacionDocumento16 páginasEDO AplicacionCarlosAún no hay calificaciones
- Algebra Teoria 02Documento26 páginasAlgebra Teoria 02Stefania MosqueraAún no hay calificaciones
- Capítulo-7 Matemática 2023Documento10 páginasCapítulo-7 Matemática 2023frabbiattiAún no hay calificaciones
- Lec3 SistemasLineales GITI23-24Documento3 páginasLec3 SistemasLineales GITI23-24Alejandro RomeroAún no hay calificaciones
- Sistemas de ecuaciones linealesDocumento61 páginasSistemas de ecuaciones linealesAngie VillalobosAún no hay calificaciones
- 6 Sistemas de Ecuaciones LinealesDocumento34 páginas6 Sistemas de Ecuaciones LinealesJoaquin GiovanniniAún no hay calificaciones
- Solución de Sistemas de EcuacionesDocumento13 páginasSolución de Sistemas de EcuacionesAmIn20122Aún no hay calificaciones
- Algebra Tema1 2012Documento20 páginasAlgebra Tema1 2012Carlos Pastor GarcíaAún no hay calificaciones
- Población inicial de PDocumento18 páginasPoblación inicial de PMaria Laura MedinaAún no hay calificaciones
- Sistemas de ecuaciones linealesDocumento5 páginasSistemas de ecuaciones linealesFabio Andrés Obando RenteríaAún no hay calificaciones
- 5-Sistemas de Ecuaciones LinealesDocumento17 páginas5-Sistemas de Ecuaciones LinealesFABIANA GUERRERO6Aún no hay calificaciones
- Sistemas de EcuacionesDocumento8 páginasSistemas de EcuacionesYesenia Salamanca Peña0% (1)
- Sistemas de Ecuaciones Lineales Y Matrices: CapítuloDocumento62 páginasSistemas de Ecuaciones Lineales Y Matrices: CapítuloNady FiadAún no hay calificaciones
- Sistemas lineales de ecuaciones diferenciales de primer ordenDocumento4 páginasSistemas lineales de ecuaciones diferenciales de primer ordenAnny Piña CoronaAún no hay calificaciones
- EcHomogOrden NDocumento8 páginasEcHomogOrden NAlexis José Sué AraujoAún no hay calificaciones
- El Modelo LinealDocumento28 páginasEl Modelo LinealAMYNNXXXXAún no hay calificaciones
- Matemáticas. Sistemas de Ecuaciones. Teoría.Documento32 páginasMatemáticas. Sistemas de Ecuaciones. Teoría.Cristina LopezAún no hay calificaciones
- Oviedo Sistemas de Ecuaciones - DesbloqueadoDocumento50 páginasOviedo Sistemas de Ecuaciones - DesbloqueadodanielaAún no hay calificaciones
- Cálculo Avanzado Capitulo 1 PDFDocumento11 páginasCálculo Avanzado Capitulo 1 PDFGermán BrescianoAún no hay calificaciones
- Sistemas de ecuaciones lineales: resolución y propiedadesDocumento36 páginasSistemas de ecuaciones lineales: resolución y propiedadesjc192780% (5)
- Ecuaciones Diferenciales HomogéneasDocumento14 páginasEcuaciones Diferenciales HomogéneasThe ShamanAún no hay calificaciones
- Modelos Sistemas Ecuaciones DiferencialesDocumento56 páginasModelos Sistemas Ecuaciones DiferencialesErica Esther G'rAún no hay calificaciones
- Universidad Nacional Mayor de San Marcos: Jorge Fernández Sedano, 12130085 Profesor: Heidi Chupayo EvangelistaDocumento22 páginasUniversidad Nacional Mayor de San Marcos: Jorge Fernández Sedano, 12130085 Profesor: Heidi Chupayo EvangelistaJorge FernándezAún no hay calificaciones
- Sistema de Ecuaciones LinealesDocumento42 páginasSistema de Ecuaciones LinealesYanina RussoAún no hay calificaciones
- Trabajo Práctico #3. Sistemas de Ecuaciones Lineales 2023Documento13 páginasTrabajo Práctico #3. Sistemas de Ecuaciones Lineales 2023toxicontactoAún no hay calificaciones
- Trabajo Académico N. º 1: Facultad de Ingeniería Y ArquitecturaDocumento17 páginasTrabajo Académico N. º 1: Facultad de Ingeniería Y ArquitecturaJose NeiraAún no hay calificaciones
- Algebra - Sistemas de Ecuaciones - Teoria y Ejercicios-1 - 1266 PDFDocumento8 páginasAlgebra - Sistemas de Ecuaciones - Teoria y Ejercicios-1 - 1266 PDFCamila Gonzalez AldanaAún no hay calificaciones
- Sistema de EcuacionDocumento8 páginasSistema de EcuacionAdalid Leonela AdalidAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento30 páginasSistemas de Ecuaciones LinealesFELIX HERNANDEZ SANTIAGOAún no hay calificaciones
- Ecuaciones DiferencialesDocumento16 páginasEcuaciones DiferencialesMuni Santa Rosa de ViñaAún no hay calificaciones
- Teoria 4 - Sistemas de Ecuaciones LinealesDocumento31 páginasTeoria 4 - Sistemas de Ecuaciones LinealesVale Fernandez GiffonielloAún no hay calificaciones
- Clase 15 - Unidad 4 - Sistema Ecuaciones LinealesDocumento18 páginasClase 15 - Unidad 4 - Sistema Ecuaciones LinealesClaudia VasquezAún no hay calificaciones
- Los Sistemas de Ecuaciones Líneales Se Utilizan en Muchos Problemas de Ingeniería y de Las CienciasDocumento7 páginasLos Sistemas de Ecuaciones Líneales Se Utilizan en Muchos Problemas de Ingeniería y de Las CienciasluisAún no hay calificaciones
- GUÍA+5+-+Documento6 páginasGUÍA+5+-+Angie QuevedoAún no hay calificaciones
- Conferencia 3Documento10 páginasConferencia 3Yudi DiazAún no hay calificaciones
- SEL TeoriaDocumento21 páginasSEL TeoriadiegotanoniAún no hay calificaciones
- Sistemas de Ecuaciones Lineales.Documento14 páginasSistemas de Ecuaciones Lineales.SofiaAún no hay calificaciones
- Sistemas Definidos Por Ecuaciones en DiferenciaDocumento12 páginasSistemas Definidos Por Ecuaciones en DiferenciaJuan Carlos PintoAún no hay calificaciones
- Sistemas de ecuaciones lineales 2x2 y 3x3Documento7 páginasSistemas de ecuaciones lineales 2x2 y 3x3Yeraldín QuirogaAún no hay calificaciones
- Portabrocas Automático 1/2": Ref. 6814 HDocumento1 páginaPortabrocas Automático 1/2": Ref. 6814 HDavid CanchoAún no hay calificaciones
- Otras Resoluciones: Consejería de Presidencia, Interior Y Diálogo SocialDocumento8 páginasOtras Resoluciones: Consejería de Presidencia, Interior Y Diálogo SocialDavid CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria) : MXN M N MXNDocumento19 páginasTemas de Matemáticas (Oposiciones de Secundaria) : MXN M N MXNDavid CanchoAún no hay calificaciones
- Portabrocas Automático 1/2"Documento1 páginaPortabrocas Automático 1/2"David CanchoAún no hay calificaciones
- Disposiciones Generales: Consejería de Agricultura, Ganadería Y Desarrollo SostenibleDocumento2 páginasDisposiciones Generales: Consejería de Agricultura, Ganadería Y Desarrollo SostenibleDavid CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria)Documento24 páginasTemas de Matemáticas (Oposiciones de Secundaria)David CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria)Documento32 páginasTemas de Matemáticas (Oposiciones de Secundaria)David CanchoAún no hay calificaciones
- Tema 34Documento12 páginasTema 34kudasai_sugoiAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria)Documento18 páginasTemas de Matemáticas (Oposiciones de Secundaria)David CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria)Documento18 páginasTemas de Matemáticas (Oposiciones de Secundaria)David CanchoAún no hay calificaciones
- Tema 35Documento17 páginasTema 35kudasai_sugoiAún no hay calificaciones
- Tema 14Documento21 páginasTema 14kudasai_sugoiAún no hay calificaciones
- Tema 12 (Oposiciones de Matemáticas)Documento27 páginasTema 12 (Oposiciones de Matemáticas)David CanchoAún no hay calificaciones
- Tema 33Documento12 páginasTema 33kudasai_sugoiAún no hay calificaciones
- Métodos de integración de funciones racionales, irracionales y trigonométricasDocumento27 páginasMétodos de integración de funciones racionales, irracionales y trigonométricasDavid CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria)Documento21 páginasTemas de Matemáticas (Oposiciones de Secundaria)David CanchoAún no hay calificaciones
- Integración numéricaDocumento15 páginasIntegración numéricaDavid CanchoAún no hay calificaciones
- Tema 10Documento15 páginasTema 10kudasai_sugoiAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria)Documento22 páginasTemas de Matemáticas (Oposiciones de Secundaria)David CanchoAún no hay calificaciones
- Polinomios, fórmulas de Newton y divisibilidadDocumento28 páginasPolinomios, fórmulas de Newton y divisibilidadDavid CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria) : Tema 27Documento26 páginasTemas de Matemáticas (Oposiciones de Secundaria) : Tema 27David CanchoAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria) Tema 5Documento23 páginasTemas de Matemáticas (Oposiciones de Secundaria) Tema 5David CanchoAún no hay calificaciones
- Tema 26 (Oposiciones de Matemáticas)Documento20 páginasTema 26 (Oposiciones de Matemáticas)David CanchoAún no hay calificaciones
- Tema04 PDFDocumento35 páginasTema04 PDFLotfi ZadehAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria) Tema 8Documento19 páginasTemas de Matemáticas (Oposiciones de Secundaria) Tema 8David CanchoAún no hay calificaciones
- Tema 09Documento20 páginasTema 09kudasai_sugoiAún no hay calificaciones
- Fundamentos de la teoría de grafos y diagramas en árbolDocumento17 páginasFundamentos de la teoría de grafos y diagramas en árbolDavid CanchoAún no hay calificaciones
- Tema 07Documento22 páginasTema 07kudasai_sugoiAún no hay calificaciones
- Temas de Matemáticas (Oposiciones de Secundaria) Tema 6Documento32 páginasTemas de Matemáticas (Oposiciones de Secundaria) Tema 6David CanchoAún no hay calificaciones
- Reservaciones de United AirlinesDocumento4 páginasReservaciones de United AirlinesVictor MonteroAún no hay calificaciones
- Ejercicios de algoritmos para principiantesDocumento1 páginaEjercicios de algoritmos para principiantesSara GuzmanAún no hay calificaciones
- Evaluacion de Entendimiento Mecanico Torque de PernosDocumento3 páginasEvaluacion de Entendimiento Mecanico Torque de Pernosgabriel belmarAún no hay calificaciones
- Automatizacion de La Manufactura Proyecto ModularDocumento7 páginasAutomatizacion de La Manufactura Proyecto ModularMitzy PerezAún no hay calificaciones
- Plantillas de Copywriting para AnunciosDocumento17 páginasPlantillas de Copywriting para AnunciosGraciela Arredondo100% (1)
- Anexo 05 - Manual RPT SLR 5100.Documento12 páginasAnexo 05 - Manual RPT SLR 5100.richard100% (1)
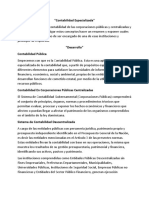
- Cont. Especializada 3ra UTESADocumento2 páginasCont. Especializada 3ra UTESARodrigo JavierAún no hay calificaciones
- Trabajo Final - Contabilidad ComputarizadaDocumento27 páginasTrabajo Final - Contabilidad ComputarizadayuberlyAún no hay calificaciones
- Practica 1 DispositivosDocumento6 páginasPractica 1 DispositivosSam ShiroAún no hay calificaciones
- Tiristores y TriacsDocumento23 páginasTiristores y TriacsLiandro GonzalezAún no hay calificaciones
- Administracion IDocumento138 páginasAdministracion Iviviana sanchez gorettaAún no hay calificaciones
- Flipped Learning Guia Visual 1-2Documento1 páginaFlipped Learning Guia Visual 1-2juegos de robloxAún no hay calificaciones
- Historia de LEGO Education enDocumento12 páginasHistoria de LEGO Education enAndyaccAún no hay calificaciones
- Anteproyecto-Trabajo Final 2021Documento41 páginasAnteproyecto-Trabajo Final 2021Héctor ZorrillaAún no hay calificaciones
- Técnicas de Perforación Practica N°1Documento8 páginasTécnicas de Perforación Practica N°1Estefany Jhanet Yujra RamosAún no hay calificaciones
- Solicito TituloDocumento1 páginaSolicito TituloElvis Chura CruzAún no hay calificaciones
- Autoevaluación 2 - Gestion de Mantenimiento (44625)Documento5 páginasAutoevaluación 2 - Gestion de Mantenimiento (44625)Susanasmm SusanasmmAún no hay calificaciones
- Foro 1-Primer ParcialDocumento4 páginasForo 1-Primer ParcialCarmelina CantareroAún no hay calificaciones
- Perez Blanco - Jon - 904869 - IEDocumento177 páginasPerez Blanco - Jon - 904869 - IEJasmineAún no hay calificaciones
- Ejercicio Teoría de DecisionesDocumento8 páginasEjercicio Teoría de DecisionesCarlos RincónAún no hay calificaciones
- EL LIDER FRENTE AL CAMBIO OficialDocumento66 páginasEL LIDER FRENTE AL CAMBIO OficialMarco M AranaAún no hay calificaciones
- Adaptaciones OcupacionalesDocumento5 páginasAdaptaciones OcupacionalesLuis MartinezAún no hay calificaciones
- Formato Inspeccion TaladroDocumento1 páginaFormato Inspeccion TaladroCONSTRUCTORA FAINCO SASAún no hay calificaciones
- Ejercicios PC1 - Integra - Alc - Tiem - GPDocumento4 páginasEjercicios PC1 - Integra - Alc - Tiem - GPCristhian Mariño ReyesAún no hay calificaciones
- Población y MuestraDocumento3 páginasPoblación y MuestrasansonettirfAún no hay calificaciones
- Trabajo colaborativo SEGUNDO BLOQUEDocumento5 páginasTrabajo colaborativo SEGUNDO BLOQUEnancy0% (1)
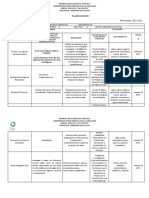
- Planificación matemáticas aplicando TICsDocumento2 páginasPlanificación matemáticas aplicando TICselias rodriguezAún no hay calificaciones
- Ejercc+resuelto+costeo+abc+y+tradicional Caso SealDocumento7 páginasEjercc+resuelto+costeo+abc+y+tradicional Caso SealjviteqAún no hay calificaciones
- PoppletDocumento1 páginaPoppletmonicaAún no hay calificaciones
- La Importancia de CBR en Los Pavimentos (Turnitin)Documento3 páginasLa Importancia de CBR en Los Pavimentos (Turnitin)Sc MejiaAún no hay calificaciones