También podría gustarte
- Practica 3 Lab Potencia FluidaDocumento6 páginasPractica 3 Lab Potencia FluidaCarlos AlmaguerAún no hay calificaciones
- Protocolo de Investigacion - Torres EolicasDocumento21 páginasProtocolo de Investigacion - Torres EolicasRicardoLandaaAún no hay calificaciones
- Protocolo de Instalación de Ductos de Aire Acondicionado. 2Documento14 páginasProtocolo de Instalación de Ductos de Aire Acondicionado. 2Giancarlo GuardiaAún no hay calificaciones
- Examen de Frenos de CamionDocumento3 páginasExamen de Frenos de CamionChristian Vásquez BasilioAún no hay calificaciones
- Diseño de Flujo de FlúidosDocumento152 páginasDiseño de Flujo de FlúidosPamela Minero100% (3)
- Mantenimiento Del Sistema de Suspensión, Dirección y FrenosDocumento19 páginasMantenimiento Del Sistema de Suspensión, Dirección y FrenosJEAN CARLO QUISPE BUENOAún no hay calificaciones
- RT200 - Wiring DiagramDocumento9 páginasRT200 - Wiring DiagramcotamaskAún no hay calificaciones
- DronesDocumento6 páginasDronesPedro CorcueraAún no hay calificaciones
- DronesDocumento22 páginasDronescamiloAún no hay calificaciones
- Informe DronDocumento4 páginasInforme DronMatheo ToapantaAún no hay calificaciones
- Avion Solar PDFDocumento6 páginasAvion Solar PDFandres felipe bueno gomezAún no hay calificaciones
- Proyecto Final Integradora I - Sistema de Bombeo Eólico - Apolonio - Ramirez - Valdovinos - Ma3-3Documento54 páginasProyecto Final Integradora I - Sistema de Bombeo Eólico - Apolonio - Ramirez - Valdovinos - Ma3-3THE GaonaAún no hay calificaciones
- Multirotor (Drones)Documento18 páginasMultirotor (Drones)Jahzeel Romero Espejo100% (1)
- Dron SolarDocumento14 páginasDron SolarErick CabezasAún no hay calificaciones
- ReporteDocumento15 páginasReporteAlejandra GuzmánAún no hay calificaciones
- Informe de Maquinas SimplesDocumento8 páginasInforme de Maquinas SimplesNíkel DlAún no hay calificaciones
- Hidrología, Investigacion de Precipitacion.Documento12 páginasHidrología, Investigacion de Precipitacion.JOSÉ SANCHEZAún no hay calificaciones
- Tarea 5 de FotogrametriaDocumento8 páginasTarea 5 de FotogrametriaLicda Maherlyn JavierAún no hay calificaciones
- Diseño y Construcción de Un Cuadricoptero A Control RemotoDocumento20 páginasDiseño y Construcción de Un Cuadricoptero A Control RemotoGus Leyva0% (1)
- Wa00200.Documento7 páginasWa00200.Alison BarruetoAún no hay calificaciones
- Avion SolarDocumento5 páginasAvion SolarAndres BuenoAún no hay calificaciones
- TR Estefania Mancioc PDFDocumento7 páginasTR Estefania Mancioc PDFManuela Gallego ArangoAún no hay calificaciones
- Informde Subida de PostesDocumento7 páginasInformde Subida de Postescesar reveloAún no hay calificaciones
- Investigación Documental y de Campo Informe Final Energía Eólica en MéxicoDocumento13 páginasInvestigación Documental y de Campo Informe Final Energía Eólica en MéxicoKenneth JtsAún no hay calificaciones
- Informe DronesDocumento7 páginasInforme DronesAlex CarrascoAún no hay calificaciones
- Física - Actividades ObligatoriasDocumento9 páginasFísica - Actividades ObligatoriasLorena Alejandra PiccinaliAún no hay calificaciones
- Arreglos - 1er Avance Del ProyectoDocumento7 páginasArreglos - 1er Avance Del ProyectoGeraldine SAENZ VALCARCELAún no hay calificaciones
- Proyecto Dinámica Etapa 1Documento11 páginasProyecto Dinámica Etapa 1Adrian Alberto Delgado GalvanAún no hay calificaciones
- Proyecto de Física (Final)Documento23 páginasProyecto de Física (Final)Limber H EncisoAún no hay calificaciones
- Máquina - SeguridadDocumento5 páginasMáquina - SeguridadJean MilanoAún no hay calificaciones
- Fisica 2 DroneDocumento2 páginasFisica 2 DroneReyk Sayk Aleman AcuñaAún no hay calificaciones
- Proyecto ElectronicaDocumento12 páginasProyecto ElectronicaHernan Romero SanchezAún no hay calificaciones
- Informe DroneDocumento22 páginasInforme DroneGabriel JorgeAún no hay calificaciones
- Proyecto DinámicaDocumento11 páginasProyecto DinámicaAdrian Alberto Delgado GalvanAún no hay calificaciones
- El Motor y La Bomba HidráulicaDocumento20 páginasEl Motor y La Bomba HidráulicaAndréAún no hay calificaciones
- Guía 7° 2P TecnologíaDocumento4 páginasGuía 7° 2P TecnologíaJeisson GustinAún no hay calificaciones
- Mis ideas filosóficas con gráficos: Mis ideas filosóficas, #4De EverandMis ideas filosóficas con gráficos: Mis ideas filosóficas, #4Aún no hay calificaciones
- Embop U3 A2 MiraDocumento4 páginasEmbop U3 A2 MiraMichelleAún no hay calificaciones
- Actividad de Energia EolicaDocumento8 páginasActividad de Energia EolicaVR JesusAún no hay calificaciones
- Cr-02 - 2014 Registro ProtocoloDocumento11 páginasCr-02 - 2014 Registro ProtocoloPatricia CruzAún no hay calificaciones
- Energia Eolica - InvestigacionDocumento11 páginasEnergia Eolica - InvestigacionedwinAún no hay calificaciones
- Informe Dinámica de Proyecto de BatidoraDocumento18 páginasInforme Dinámica de Proyecto de BatidoraWilder RTAún no hay calificaciones
- Desarrollo Empresarial "Drone Huachanito": "Facultad de Ingeniería Industrial Sistemas E Informática "Documento20 páginasDesarrollo Empresarial "Drone Huachanito": "Facultad de Ingeniería Industrial Sistemas E Informática "Jonel CuevaAún no hay calificaciones
- Avance Punto 2 - Miguel YelaDocumento17 páginasAvance Punto 2 - Miguel YelaKevin Stiven Ceballos TorresAún no hay calificaciones
- Tipos de Drones - NovodroneDocumento11 páginasTipos de Drones - NovodroneWalter GutierrezAún no hay calificaciones
- BibliografíaDocumento3 páginasBibliografíaGuillermo Aguilar HernandezAún no hay calificaciones
- CarmenDocumento16 páginasCarmenfredy alexander arenas bedoyaAún no hay calificaciones
- Taller Semana 10Documento7 páginasTaller Semana 10yazoy02Aún no hay calificaciones
- AA1 - ElectricidadDocumento8 páginasAA1 - Electricidadsheve1202Aún no hay calificaciones
- TEORIA Máquinas y Sistemas (1º BACH)Documento50 páginasTEORIA Máquinas y Sistemas (1º BACH)almarpaAún no hay calificaciones
- Ala Fija y Ala RotativaDocumento3 páginasAla Fija y Ala RotativaRogelio VargasAún no hay calificaciones
- 04.MECANISMOS - 3ยบ reducidoDocumento35 páginas04.MECANISMOS - 3ยบ reducidoAlejandro Aznar AlvizAún no hay calificaciones
- Portada Poster PlantillasDocumento22 páginasPortada Poster PlantillasDaniiela122Aún no hay calificaciones
- Energias - Alternativasl - Tarea - 1Documento3 páginasEnergias - Alternativasl - Tarea - 1Angelica GuijarroAún no hay calificaciones
- Trabajo EolicoDocumento4 páginasTrabajo EolicoAbril LeónAún no hay calificaciones
- CUESTIONARIO EXAMEN II QUIMESTRE - 1ero BT Soporte TécnicoDocumento2 páginasCUESTIONARIO EXAMEN II QUIMESTRE - 1ero BT Soporte TécnicoLady Nathalie AvelinoAún no hay calificaciones
- Actividad #2 TecnologíaDocumento12 páginasActividad #2 TecnologíaCarlos Arturo Gonzalez MuñosAún no hay calificaciones
- Trabajo de Investigacion OriginalDocumento30 páginasTrabajo de Investigacion OriginalMirley MarinAún no hay calificaciones
- Motor StirilingDocumento9 páginasMotor StirilingNorma ArroyoAún no hay calificaciones
- Actividad 1 - Recurso Energético y Energías AlternativasDocumento3 páginasActividad 1 - Recurso Energético y Energías AlternativasBlanca BenavidesAún no hay calificaciones
- Formato Fisica DronDocumento20 páginasFormato Fisica DronB David Street SkateAún no hay calificaciones
- Tipos de Drones (Geomatica)Documento6 páginasTipos de Drones (Geomatica)jorgeAún no hay calificaciones
- Tarea 02-Grupo N°2Documento19 páginasTarea 02-Grupo N°2Cesar Miguel Gallardo TorrelAún no hay calificaciones
- Frenado RegenerativoDocumento2 páginasFrenado RegenerativoAdj GomezAún no hay calificaciones
- Operaciones auxiliares de servicios de la aeronave. TMVO0109De EverandOperaciones auxiliares de servicios de la aeronave. TMVO0109Aún no hay calificaciones
- Necesidades energéticas y propuestas de instalaciones solares. ENAC0108De EverandNecesidades energéticas y propuestas de instalaciones solares. ENAC0108Aún no hay calificaciones
- The PlanetDocumento1 páginaThe PlanetGonzabay ArianaAún no hay calificaciones
- El Univers oDocumento32 páginasEl Univers oGonzabay ArianaAún no hay calificaciones
- 214 Hoja de Vida Plantilla WordDocumento2 páginas214 Hoja de Vida Plantilla WordGonzabay ArianaAún no hay calificaciones
- PROY INTERD - 2docurso-Propuesta-InvestigDocumento5 páginasPROY INTERD - 2docurso-Propuesta-InvestigGonzabay ArianaAún no hay calificaciones
- Unidad Educativa FiscalDocumento7 páginasUnidad Educativa FiscalGonzabay ArianaAún no hay calificaciones
- Bitacora de Trabajo Semana 18 Benavides Erick 2do e BguDocumento6 páginasBitacora de Trabajo Semana 18 Benavides Erick 2do e BguGonzabay ArianaAún no hay calificaciones
- Bitacora de Trabajo Semana 17 Benavides Erick 2do e BguDocumento6 páginasBitacora de Trabajo Semana 17 Benavides Erick 2do e BguGonzabay ArianaAún no hay calificaciones
- Bitacora de Trabajo Semana 10 Benavides Erick Segundo e Ciencias BguDocumento7 páginasBitacora de Trabajo Semana 10 Benavides Erick Segundo e Ciencias BguGonzabay ArianaAún no hay calificaciones
- Ppe - Actividad - 8 Segundo BguDocumento4 páginasPpe - Actividad - 8 Segundo BguGonzabay ArianaAún no hay calificaciones
- Bitacora de Trabajo Semana 19 Benavides Erick 2do e BguDocumento7 páginasBitacora de Trabajo Semana 19 Benavides Erick 2do e BguGonzabay ArianaAún no hay calificaciones
- Plantilla para Proyecto de VinculacionDocumento7 páginasPlantilla para Proyecto de VinculacionGonzabay ArianaAún no hay calificaciones
- Catalogo General Imbra PDFDocumento111 páginasCatalogo General Imbra PDFJonathan Lara FandiñoAún no hay calificaciones
- Laboratorio de FisicaDocumento5 páginasLaboratorio de FisicaMAIMAN PARKER WILSONAún no hay calificaciones
- Diseño Captaciones EspecialesDocumento8 páginasDiseño Captaciones EspecialesJob AguilarAún no hay calificaciones
- Investigacion Formativa Fluidos.Documento2 páginasInvestigacion Formativa Fluidos.Juan Carlos PeñaAún no hay calificaciones
- Expo MecanicaDocumento2 páginasExpo MecanicaHeber MarinAún no hay calificaciones
- Equilibrado o BalanceoDocumento85 páginasEquilibrado o BalanceoJeancarlos MendezAún no hay calificaciones
- Evalaucion Icfes Leyes de NewtonDocumento4 páginasEvalaucion Icfes Leyes de NewtondugAún no hay calificaciones
- Torres Teorico 2015 10Documento35 páginasTorres Teorico 2015 10XCarl09XAún no hay calificaciones
- Solución CP - M5T1 - Diseño Tensión y Flexocompresión AISCDocumento18 páginasSolución CP - M5T1 - Diseño Tensión y Flexocompresión AISCAlejandro ArévaloAún no hay calificaciones
- Mantenimiento SedimentadoresDocumento4 páginasMantenimiento SedimentadoresMedaJrArellanoAún no hay calificaciones
- Transporte Neumático y AplicacionesDocumento4 páginasTransporte Neumático y AplicacionesSarai EstradaAún no hay calificaciones
- Analisis de Precios Unitarios-Reservorio ApoyadoDocumento33 páginasAnalisis de Precios Unitarios-Reservorio ApoyadoArturo Z. Miranda HernandezAún no hay calificaciones
- Compresores Semi-Herméticos OctagonDocumento27 páginasCompresores Semi-Herméticos OctagongestioneAún no hay calificaciones
- Diagrama Esfuerzo-DeformacionDocumento12 páginasDiagrama Esfuerzo-Deformacionanon_537362187Aún no hay calificaciones
- Tarea BMCM U1Documento2 páginasTarea BMCM U1Alejandroxd45Aún no hay calificaciones
- 01TRABAJODocumento19 páginas01TRABAJOjoserommariobarbozasAún no hay calificaciones
- Fis 102 Descarga Por OrificioDocumento18 páginasFis 102 Descarga Por OrificioLuz Karen TantaniAún no hay calificaciones
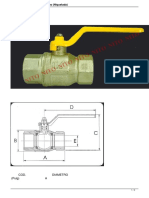
- Valvula Esferica Gas 700 Lbs CromadaDocumento4 páginasValvula Esferica Gas 700 Lbs CromadaEdgardo MejiaAún no hay calificaciones
- Caldera PDFDocumento68 páginasCaldera PDFGuillermo RamirezAún no hay calificaciones
- Cuestionario ResueltoDocumento4 páginasCuestionario Resueltojeison villotaAún no hay calificaciones
- Hidraulica Unidad 5Documento3 páginasHidraulica Unidad 5KevinJairRodriguezAún no hay calificaciones
- Esfuerzos TérmicosDocumento19 páginasEsfuerzos TérmicosFrancisco Díaz GonzálesAún no hay calificaciones
- Informe Lab de Fisica Subgrupo 2 Experiencia #2Documento14 páginasInforme Lab de Fisica Subgrupo 2 Experiencia #2Ariel GonzálezAún no hay calificaciones
- Alpha y BetaDocumento13 páginasAlpha y BetaLucho BetoAún no hay calificaciones