También podría gustarte
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Tarea Fisica MayteDocumento11 páginasTarea Fisica MayteMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Máquinas Simples y CompuestasDocumento9 páginasMáquinas Simples y CompuestasLudin LópezAún no hay calificaciones
- Verificación de estructuras deformadas. TMVL0309De EverandVerificación de estructuras deformadas. TMVL0309Calificación: 5 de 5 estrellas5/5 (1)
- Máquinas SimplesDocumento5 páginasMáquinas SimplesAbby VergaraAún no hay calificaciones
- Máquinas SimplesDocumento5 páginasMáquinas SimplesEstefi RobledoAún no hay calificaciones
- Maquinas SimplesDocumento16 páginasMaquinas SimplesMichell Bejarano100% (1)
- Máquinas SimplesDocumento13 páginasMáquinas SimplescecialvadoAún no hay calificaciones
- LCM Equipo2 Ev Etapa4Documento13 páginasLCM Equipo2 Ev Etapa4Silva Ortiz Andrea AlejandraAún no hay calificaciones
- Practica de Campo Fisica 2 Dep. Maquinas SimplesDocumento11 páginasPractica de Campo Fisica 2 Dep. Maquinas SimplesFernanda OchoaAún no hay calificaciones
- Ciencias Naturales 1año E-F-G - Yusneidy SalgadoDocumento8 páginasCiencias Naturales 1año E-F-G - Yusneidy Salgadoisel guerreroAún no hay calificaciones
- Fisica DE7, 8Documento20 páginasFisica DE7, 8Clever Machak63% (8)
- 7 Máquinas SimplesDocumento7 páginas7 Máquinas SimplesEuge MedinaAún no hay calificaciones
- Sintesis Maquinas Simple y Compuestas 6°Documento14 páginasSintesis Maquinas Simple y Compuestas 6°Quimica SebastianaAún no hay calificaciones
- Maquinas SimplesDocumento49 páginasMaquinas SimplesLuisMoralesAún no hay calificaciones
- Concepto de MaquinaDocumento11 páginasConcepto de MaquinaDaNiel MoLanoAún no hay calificaciones
- Proyecto1 AIOMDocumento21 páginasProyecto1 AIOMalejandraisabelojedamoreno1Aún no hay calificaciones
- Maquina Simple Ciencias NaturalesDocumento21 páginasMaquina Simple Ciencias Naturalesyosmar colina100% (1)
- Las Maquinas Simples y Compuestas - DocheidyDocumento4 páginasLas Maquinas Simples y Compuestas - Docheidyheidysanchez1306Aún no hay calificaciones
- MecanismosDocumento417 páginasMecanismosMerche HerreraAún no hay calificaciones
- Maquinas SimplesDocumento18 páginasMaquinas SimplesFlayser Campos GuillénAún no hay calificaciones
- Maquinas SimplesDocumento3 páginasMaquinas SimplesErickson Lozada BalcazarAún no hay calificaciones
- Maquinas SimplesDocumento3 páginasMaquinas SimplesVictor Jose Benitez BenitezAún no hay calificaciones
- 1.1 Cs Naturales 1°año A, B, CDocumento5 páginas1.1 Cs Naturales 1°año A, B, Ceilyn monasterioAún no hay calificaciones
- Maquinas SimplesDocumento18 páginasMaquinas SimplesmiguelAún no hay calificaciones
- Mecanizacion, Maquinas Simples PDFDocumento17 páginasMecanizacion, Maquinas Simples PDFFlayser Campos GuillénAún no hay calificaciones
- Apuntes de Mecatrónica-Miguel Grassi - Parte 3Documento9 páginasApuntes de Mecatrónica-Miguel Grassi - Parte 3Ceci_SunshineAún no hay calificaciones
- Torque PALANCAS y EquilibrioDocumento21 páginasTorque PALANCAS y Equilibriodiegolz7Aún no hay calificaciones
- Maquinas SimplesDocumento11 páginasMaquinas SimplesMatt LenguaAún no hay calificaciones
- Diapositivasdemquinassimples 120828094946 Phpapp01Documento25 páginasDiapositivasdemquinassimples 120828094946 Phpapp01Gerardo Alexander Azañero AlaniaAún no hay calificaciones
- Mecanica para La AutomatizaciónDocumento22 páginasMecanica para La Automatizacióngax danyAún no hay calificaciones
- Maquinas y MecanismosDocumento38 páginasMaquinas y MecanismosNoa Carro AmigoAún no hay calificaciones
- Maquinas Simples y PalancasDocumento8 páginasMaquinas Simples y PalancasDiego Samuel Gira ApazaAún no hay calificaciones
- Objetivo #02 Maquinas SimplesDocumento10 páginasObjetivo #02 Maquinas SimplesFernando CancinoAún no hay calificaciones
- APUNTES Máquinas - y - MecanismosDocumento8 páginasAPUNTES Máquinas - y - MecanismossabelatecnoAún no hay calificaciones
- Las máquinas simples y su importancia en la vida cotidianaDocumento7 páginasLas máquinas simples y su importancia en la vida cotidianaAldrovandi RomeroAún no hay calificaciones
- Maquinas SimplesDocumento19 páginasMaquinas SimplesJonattan AnayaAún no hay calificaciones
- MaquinasSimples40Documento11 páginasMaquinasSimples40James HowlettAún no hay calificaciones
- Maquina Simplke 6Documento35 páginasMaquina Simplke 6Gerardo Alexander Azañero AlaniaAún no hay calificaciones
- Práctica 8: Selección de motor PLCDocumento11 páginasPráctica 8: Selección de motor PLCAdad MoraAún no hay calificaciones
- Ciencias Naturales Las MaquinasDocumento3 páginasCiencias Naturales Las MaquinasZaddy HernandezAún no hay calificaciones
- Máquinas MecánicasDocumento7 páginasMáquinas MecánicasAlexander Chavez EspinozaAún no hay calificaciones
- Escuela Industrial #3 "Oscar Smith"Documento27 páginasEscuela Industrial #3 "Oscar Smith"pekeponce10Aún no hay calificaciones
- Investigacion PoleasDocumento8 páginasInvestigacion Poleasjonathan velasquez100% (1)
- Maquinas SimplesDocumento6 páginasMaquinas SimplesSonia ChirinosAún no hay calificaciones
- T4-Máquinas y MecanismosDocumento9 páginasT4-Máquinas y Mecanismospelandintecno100% (1)
- MecanismosDocumento31 páginasMecanismosPabloCruces100% (1)
- NOTAS DE MÁQUINAS SIMPLESDocumento7 páginasNOTAS DE MÁQUINAS SIMPLESJesus CohuoAún no hay calificaciones
- Ficica Maquina SimpleDocumento7 páginasFicica Maquina SimplenellaAún no hay calificaciones
- Máquinas SimplesDocumento6 páginasMáquinas SimplesWilliam Alverto Ramirez PlasenciaAún no hay calificaciones
- 2º ESO-Máquinas y Mecanismos - Ref PDFDocumento21 páginas2º ESO-Máquinas y Mecanismos - Ref PDFdavidulibarriAún no hay calificaciones
- Trabajo de Investigacion FisicaDocumento6 páginasTrabajo de Investigacion FisicaEnrique ReyesAún no hay calificaciones
- 3.2. Clasificación de Los MecanismosDocumento31 páginas3.2. Clasificación de Los MecanismosEddy Cadena GrandaAún no hay calificaciones
- Maquinas simplesDocumento8 páginasMaquinas simplesLuna SarahíAún no hay calificaciones
- Máquinas y MecanismosDocumento20 páginasMáquinas y MecanismosVito RamosAún no hay calificaciones
- Guia Ciencias Naturales 1er Año Trabajo y Maquinas Simples.Documento6 páginasGuia Ciencias Naturales 1er Año Trabajo y Maquinas Simples.joslin jimenezAún no hay calificaciones
- Cómo funciona una palanca de primer gradoDocumento9 páginasCómo funciona una palanca de primer gradoEstefany TexeiraAún no hay calificaciones
- Qué Es Una MáquinaDocumento52 páginasQué Es Una MáquinaMaria Julia MartinezAún no hay calificaciones
- A#8 JDMGDocumento14 páginasA#8 JDMGJESUS MONITAAún no hay calificaciones
- Evolucion de Higiene y Seguridad en Estados UnidosDocumento15 páginasEvolucion de Higiene y Seguridad en Estados UnidosMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Estudio movimientos generalesDocumento1 páginaEstudio movimientos generalesMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Documento PDF 6Documento1 páginaDocumento PDF 6MARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Estudio movimientos generalesDocumento1 páginaEstudio movimientos generalesMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Documento PDF 3-CompressedDocumento1 páginaDocumento PDF 3-CompressedMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Factores de infertilidadDocumento9 páginasFactores de infertilidadMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Materia NMDocumento2 páginasMateria NMMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Calculo de DeduccionesDocumento2 páginasCalculo de DeduccionesMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Calculo Integral: Serie de FourierDocumento11 páginasCalculo Integral: Serie de FourierMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
- Calculo Integral Reporte Tarea 326wwDocumento11 páginasCalculo Integral Reporte Tarea 326wwMARTINEZ ESPINOZA JESUS AARONAún no hay calificaciones
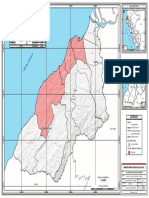
- Mapa Politico de La Region TumbesDocumento1 páginaMapa Politico de La Region Tumbesmiguel angel guaranda diosesAún no hay calificaciones
- Actividad 2 Evidencia 2 TallerDocumento8 páginasActividad 2 Evidencia 2 TallerJohelis RojanoAún no hay calificaciones
- 16 El Cerebro Cambia y Rejuvenece 1Documento14 páginas16 El Cerebro Cambia y Rejuvenece 1Agus CabelloAún no hay calificaciones
- Trabajo de Grado - Versión Final Impresión)Documento114 páginasTrabajo de Grado - Versión Final Impresión)juanAún no hay calificaciones
- Canteras en El PerúDocumento60 páginasCanteras en El PerúAldito NavarroAún no hay calificaciones
- TI03 - Operacion - Evaluacion - Desempeno - Mejora - Stepanian - MartinezDocumento7 páginasTI03 - Operacion - Evaluacion - Desempeno - Mejora - Stepanian - MartinezNichan StepanianAún no hay calificaciones
- AlprazolamDocumento11 páginasAlprazolamnikAún no hay calificaciones
- Relación de VacíosDocumento3 páginasRelación de VacíosEmmanuel Gonzalez CuevasAún no hay calificaciones
- AspiradoraDocumento2 páginasAspiradoraAida VillarrealAún no hay calificaciones
- Teoría constructivismo social Vygotsky inteligencia construcción socialDocumento1 páginaTeoría constructivismo social Vygotsky inteligencia construcción socialMartín EstradaAún no hay calificaciones
- Currículum Mariana MendozaDocumento2 páginasCurrículum Mariana MendozaMariana100% (1)
- Capitulo 3 Analisis de SemillasDocumento12 páginasCapitulo 3 Analisis de Semillaslarry duarteAún no hay calificaciones
- ACERERIA Y CLASIFICACION JDDocumento10 páginasACERERIA Y CLASIFICACION JDjudithAún no hay calificaciones
- 01 - Say Yes To Love - Ajme WilliamsDocumento215 páginas01 - Say Yes To Love - Ajme WilliamsCATALINA MONTERO RAMIREZ100% (1)
- Un Modelo de Madurez para RRHHDocumento14 páginasUn Modelo de Madurez para RRHHBuncet Ruiz100% (1)
- 6ES71326BH010BA0 Datasheet EsDocumento5 páginas6ES71326BH010BA0 Datasheet EseeeAún no hay calificaciones
- Programa Financiera 2Documento15 páginasPrograma Financiera 2Pamela LopezAún no hay calificaciones
- Manual FreecadDocumento57 páginasManual FreecadIsrael Rodriguez100% (1)
- Serie Compuestos InorgánicosDocumento2 páginasSerie Compuestos InorgánicosDiego Armando AlvarezAún no hay calificaciones
- 6.2 Kluberfood FTDocumento2 páginas6.2 Kluberfood FTVanessa PedrazaAún no hay calificaciones
- ACTIVIDAD 1 Diaz Meza Jose Angel 2B Física PDFDocumento4 páginasACTIVIDAD 1 Diaz Meza Jose Angel 2B Física PDFDiaz Meza Jose AngelAún no hay calificaciones
- Karin ChavesDocumento7 páginasKarin ChavesDavid MaytaAún no hay calificaciones
- Perspectiva - Un Punto de FugaDocumento23 páginasPerspectiva - Un Punto de FugaMaria Aguilar HilaresAún no hay calificaciones
- Magnitudes y vectores en FísicaDocumento16 páginasMagnitudes y vectores en FísicaYesenia Arenas100% (1)
- Ficha Tecnica Del Acido Nitrico PDFDocumento2 páginasFicha Tecnica Del Acido Nitrico PDFAmilcar AlonzoAún no hay calificaciones
- Formato de Asistencia Del PersonalDocumento1 páginaFormato de Asistencia Del Personalalex lizarragaAún no hay calificaciones
- Onboarding SustentaciónDocumento20 páginasOnboarding SustentaciónAnitza Marie Nadramia ChacaltanaAún no hay calificaciones
- Junta cementicia Alfacolor 5-15Documento3 páginasJunta cementicia Alfacolor 5-15Ruly SCAún no hay calificaciones
- Principales Enfermedades Del Cultivo de MaízDocumento7 páginasPrincipales Enfermedades Del Cultivo de MaízFabricio Carriel CoelloAún no hay calificaciones
- Elementos de Auditoria Interna y Auditoria ExternaDocumento9 páginasElementos de Auditoria Interna y Auditoria ExternaDanessa PerezAún no hay calificaciones
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Manual técnico de refrigerantesDe EverandManual técnico de refrigerantesCalificación: 4 de 5 estrellas4/5 (4)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Análisis estructural básico: Apuntes de claseDe EverandAnálisis estructural básico: Apuntes de claseCalificación: 5 de 5 estrellas5/5 (6)
- Fisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposDe EverandFisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposAún no hay calificaciones
- Manual de combustibles alternativos y tecnología automotrizDe EverandManual de combustibles alternativos y tecnología automotrizCalificación: 5 de 5 estrellas5/5 (6)
- GuíaBurros Comprar un coche eléctrico: Todo lo que debes saber sobre los coches eléctricosDe EverandGuíaBurros Comprar un coche eléctrico: Todo lo que debes saber sobre los coches eléctricosCalificación: 5 de 5 estrellas5/5 (2)
- Inteligencia física: Aprende a ver el mundo con la mente de un físicoDe EverandInteligencia física: Aprende a ver el mundo con la mente de un físicoCalificación: 5 de 5 estrellas5/5 (41)
- El ADN espiritual: Método de iluminación espiritualDe EverandEl ADN espiritual: Método de iluminación espiritualCalificación: 4.5 de 5 estrellas4.5/5 (16)
- MF0624_1 - Técnicas básicas de electricidad de vehículosDe EverandMF0624_1 - Técnicas básicas de electricidad de vehículosCalificación: 5 de 5 estrellas5/5 (2)
- Análisis de circuitos eléctricos Estado estableDe EverandAnálisis de circuitos eléctricos Estado estableCalificación: 5 de 5 estrellas5/5 (8)
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposDe EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposCalificación: 5 de 5 estrellas5/5 (1)
- Casos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSDe EverandCasos de estudio de termodinámica: Solución mediante el uso de ASPENHYSYSCalificación: 4.5 de 5 estrellas4.5/5 (7)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- MF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraDe EverandMF1461_2 - Mantenimiento de primer nivel de vehículos de transporte por carreteraCalificación: 4 de 5 estrellas4/5 (2)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Física mecánica: Nivelación para estudiantes universitariosDe EverandFísica mecánica: Nivelación para estudiantes universitariosCalificación: 4 de 5 estrellas4/5 (7)
- La Física - Aventura del pensamientoDe EverandLa Física - Aventura del pensamientoCalificación: 4.5 de 5 estrellas4.5/5 (9)