También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- El Motor de CDDocumento24 páginasEl Motor de CDYadhira Fatima HernándezAún no hay calificaciones
- 8 Tema2 - IE - Corriente Alterna - 2017 - 2018Documento37 páginas8 Tema2 - IE - Corriente Alterna - 2017 - 2018JUAN CARLOS BAUTISTA CATOTAAún no hay calificaciones
- Maquina de CaDocumento13 páginasMaquina de CaHéctor SolísAún no hay calificaciones
- Motores AsincronosDocumento27 páginasMotores AsincronosAvaito100% (1)
- "Variadores ABB ACS880 para Aplicaciones Industriales Con Motores de Imanes PermanentesDocumento20 páginas"Variadores ABB ACS880 para Aplicaciones Industriales Con Motores de Imanes PermanentesJose GutierrezAún no hay calificaciones
- 2.el Manso CochamoDocumento1 página2.el Manso CochamoMauricio ReyesAún no hay calificaciones
- Accel cl6 r2Documento21 páginasAccel cl6 r2ramiroAún no hay calificaciones
- Máquina de Inducción. Parte IiDocumento32 páginasMáquina de Inducción. Parte IiednajolopezAún no hay calificaciones
- 14 Generador Síncrono-2Documento34 páginas14 Generador Síncrono-2Dilman Alberto Ccotahuana HuarcaAún no hay calificaciones
- Produccion Torque Con Variador y Motor A CDocumento60 páginasProduccion Torque Con Variador y Motor A Cjuan manuelAún no hay calificaciones
- Motor Inducción Func Cto Eq Rend TorqueDocumento83 páginasMotor Inducción Func Cto Eq Rend TorqueGabriel GimenezAún no hay calificaciones
- GENERADORESDocumento77 páginasGENERADORESGonzalo MorillaAún no hay calificaciones
- Teoria Lab2Documento52 páginasTeoria Lab2gotcha mulliganAún no hay calificaciones
- Maquina Sincrona en Estado TransitorioDocumento15 páginasMaquina Sincrona en Estado TransitoriobrinnerAún no hay calificaciones
- Generadores SíncronosDocumento44 páginasGeneradores SíncronosmariaAún no hay calificaciones
- Accel cl7 r3Documento25 páginasAccel cl7 r3ramiroAún no hay calificaciones
- Valor RMS - Valor Pico - Valor Promedio - Electrónica Unicrom PDFDocumento9 páginasValor RMS - Valor Pico - Valor Promedio - Electrónica Unicrom PDFJose AlvaradoAún no hay calificaciones
- Clase 2Documento31 páginasClase 2edwarddanielrvilAún no hay calificaciones
- Electricidad Aplicada y Maquinas - 10 - Motores-Asincronos TrifásicosDocumento21 páginasElectricidad Aplicada y Maquinas - 10 - Motores-Asincronos TrifásicosyerkoelkingAún no hay calificaciones
- Cap 1. Teoria GeneralizadaDocumento28 páginasCap 1. Teoria GeneralizadaJosé Luis García CubasAún no hay calificaciones
- 02sistemas Trifasicos FinalDocumento163 páginas02sistemas Trifasicos FinaljesusAún no hay calificaciones
- Maquina Jaula de Ardilla IDocumento107 páginasMaquina Jaula de Ardilla IGonzalo Andrés FernándezAún no hay calificaciones
- Proyectos Integrados Semana 9Documento104 páginasProyectos Integrados Semana 9cristian diazAún no hay calificaciones
- Esp AR LCD ANG96Documento2 páginasEsp AR LCD ANG96Ronald Suriaga AuthemanAún no hay calificaciones
- Esp AR LCD AHM1Documento4 páginasEsp AR LCD AHM1INGWIRBOAún no hay calificaciones
- 03circuitos E IIDocumento72 páginas03circuitos E IIulissesAún no hay calificaciones
- Analisis de Sistemas Electricos de Potencia I (Ee-353m)Documento57 páginasAnalisis de Sistemas Electricos de Potencia I (Ee-353m)gilsonrochaandAún no hay calificaciones
- Folleto EMA 1009 UP PDFDocumento2 páginasFolleto EMA 1009 UP PDFkjkljkljlkjljlkAún no hay calificaciones
- U4 ML713 2. - Alternadores y TransformadoresDocumento196 páginasU4 ML713 2. - Alternadores y TransformadoresLeyton MamaniAún no hay calificaciones
- Fuerza Electromotriz en DinamosDocumento4 páginasFuerza Electromotriz en DinamosGustavo Henry VargasAún no hay calificaciones
- Resumen CinéticaDocumento5 páginasResumen CinéticaRICARDO SCHEELAún no hay calificaciones
- 3c+5 B Estabilidad SMIBDocumento2 páginas3c+5 B Estabilidad SMIBPAMELA LISETH COLQUE ARAMAYOAún no hay calificaciones
- Sesion 09 CIRCUITOS RC RL RLCDocumento23 páginasSesion 09 CIRCUITOS RC RL RLCWilliam Yoel CcalloAún no hay calificaciones
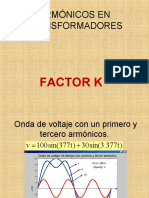
- Factor KDocumento52 páginasFactor KDAVID ISAI PLOMOZO VALDEZAún no hay calificaciones
- S13.s1 - Estabilidad de TensionDocumento60 páginasS13.s1 - Estabilidad de TensionMICHAEL LUIS VILLAVICENCIO MORALESAún no hay calificaciones
- Compensación de Adelanto, Atraso y Diseno PidDocumento44 páginasCompensación de Adelanto, Atraso y Diseno PidRodrigo OrtegaAún no hay calificaciones
- Prncipio y Análisis Del Generador SíncronoDocumento14 páginasPrncipio y Análisis Del Generador SíncronoEnrique GomezAún no hay calificaciones
- LIT 600 - LAB 4 Corrección Factor Pot. de LTDocumento3 páginasLIT 600 - LAB 4 Corrección Factor Pot. de LTHuanca WilAún no hay calificaciones
- 01 - Control Systems Engineering - En.esDocumento35 páginas01 - Control Systems Engineering - En.esVielka leliet Mendoza TanAún no hay calificaciones
- U4 ML713 2. - Alternadores y TransformadoresDocumento196 páginasU4 ML713 2. - Alternadores y TransformadoresJhon FrancoAún no hay calificaciones
- Clase 15 FebreroDocumento14 páginasClase 15 Febrerocristian mejiaAún no hay calificaciones
- Motor Inducción IntroDocumento10 páginasMotor Inducción IntroagustinAún no hay calificaciones
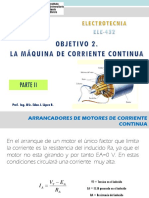
- Máquinas de Corriente Continua. Motor 2Documento23 páginasMáquinas de Corriente Continua. Motor 2Steven SilvaAún no hay calificaciones
- Mapa Conceptual - Javier Pinzón PDFDocumento1 páginaMapa Conceptual - Javier Pinzón PDFJavier E. PinzónAún no hay calificaciones
- EP2122 Examen 220112 P2 SolucionDocumento7 páginasEP2122 Examen 220112 P2 SolucionPaco RabolokoAún no hay calificaciones
- Armónicos-Mapa MentalDocumento4 páginasArmónicos-Mapa MentalJair Gomez GomezAún no hay calificaciones
- Lineas de Transmision Semana 4Documento33 páginasLineas de Transmision Semana 4jef floresAún no hay calificaciones
- Material Apoyo AntenasDocumento89 páginasMaterial Apoyo AntenasSteffie GabriellaAún no hay calificaciones
- Compensador Estatico SincronoDocumento4 páginasCompensador Estatico SincronoDaniels Theo MENDOZA VILLAVERDEAún no hay calificaciones
- Exposicion Grupo 4 (Bobina Movil)Documento32 páginasExposicion Grupo 4 (Bobina Movil)Juan PachecoAún no hay calificaciones
- Generador CD Compuesto Corto, Largo Acumulativo, DiferencialDocumento15 páginasGenerador CD Compuesto Corto, Largo Acumulativo, DiferencialWILEBALDO FLORES ESPÍNOLA100% (1)
- Interruptor de PotenciaDocumento2 páginasInterruptor de PotenciaRobert Cea100% (1)
- Informe 7 INSEP EPNDocumento4 páginasInforme 7 INSEP EPNIan BaqueroAún no hay calificaciones
- Nomenclatura Y SimbolosDocumento5 páginasNomenclatura Y SimbolosJOSE LEONARDO ALDAIRD USCCA GIRALDOAún no hay calificaciones
- LABORATORIO T N 9..Documento4 páginasLABORATORIO T N 9..DivarAún no hay calificaciones
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- Antenas verticales para bajas frecuencias: (MF y HF)De EverandAntenas verticales para bajas frecuencias: (MF y HF)Aún no hay calificaciones
- Ele T Ins Ele Aut DCB CDocumento143 páginasEle T Ins Ele Aut DCB COriol PonsAún no hay calificaciones
- Catalogo General Tecnodin 2021Documento257 páginasCatalogo General Tecnodin 2021Oriol PonsAún no hay calificaciones
- EXT 5E9QVcfWfGdu5XvYu6WGDocumento3 páginasEXT 5E9QVcfWfGdu5XvYu6WGpAoliTa aRRIeTaAún no hay calificaciones
- Manual y Catalogo de ElectricistaDocumento530 páginasManual y Catalogo de Electricistad-fbuser-31614655100% (1)
- Navas Alvarez Miguelangel TesisDocumento310 páginasNavas Alvarez Miguelangel TesisisabelAún no hay calificaciones
- DESARROLLO DE UN SISTEMA DE Validacion Por ISO 26262Documento57 páginasDESARROLLO DE UN SISTEMA DE Validacion Por ISO 26262Oriol PonsAún no hay calificaciones
- Aashto T88Documento5 páginasAashto T88Henrry Josué Villanueva BazánAún no hay calificaciones
- Actividad 4Documento4 páginasActividad 4Angie Valentina TRUJILLO CABALLEROAún no hay calificaciones
- Lean LogisticsDocumento3 páginasLean LogisticscharlieAún no hay calificaciones
- s28 Sec 4 Recurso MatematicaDocumento5 páginass28 Sec 4 Recurso MatematicabcruzzzzzAún no hay calificaciones
- Pensum Electrica UCV - NotilogiaDocumento9 páginasPensum Electrica UCV - NotilogiaNotilogía.com50% (2)
- Quién Soy YoDocumento3 páginasQuién Soy YoMateoBarrosFAún no hay calificaciones
- Insuficiencia RespiratoriaDocumento23 páginasInsuficiencia RespiratoriaMiguel Angel Ramirez RamirezAún no hay calificaciones
- Laboratorio Gel para CabelloDocumento2 páginasLaboratorio Gel para CabelloMauricio Quintero100% (1)
- Objetivos MedevacDocumento3 páginasObjetivos Medevacmaricela cruzAún no hay calificaciones
- La Formación Del Lector Literario Teresa ColomerDocumento15 páginasLa Formación Del Lector Literario Teresa ColomerAída De Paula100% (1)
- Formato PasantiasDocumento25 páginasFormato PasantiasLibrosCristianosAún no hay calificaciones
- El Hombre Es Bueno o MaloDocumento3 páginasEl Hombre Es Bueno o MaloKarferlei GojuAún no hay calificaciones
- 2° 1° Cuatrimestre - SotoDocumento5 páginas2° 1° Cuatrimestre - SotoLucas Soto100% (2)
- Ebook La Risa en Las Experiencias de AprendizajeDocumento10 páginasEbook La Risa en Las Experiencias de AprendizajebarazarteernestoAún no hay calificaciones
- Worthington Industries, IncDocumento296 páginasWorthington Industries, IncCARLOS FERNANDO PERUCHO QUINTEROAún no hay calificaciones
- El Oso PerezosoDocumento4 páginasEl Oso PerezosoJosué De León Bernal0% (1)
- Hoja de Ejercicios #2 Economia IDocumento8 páginasHoja de Ejercicios #2 Economia IJunior QSAún no hay calificaciones
- Escalera de InferenciaDocumento4 páginasEscalera de Inferenciarabas_Aún no hay calificaciones
- GUÍA No 2 - Medidas de Tendencia Central y Dispersión - RRR PDFDocumento6 páginasGUÍA No 2 - Medidas de Tendencia Central y Dispersión - RRR PDFOrlando K'rmona Martinez100% (1)
- Pedido SragisselayvariosDocumento6 páginasPedido SragisselayvariosDixy HerreraAún no hay calificaciones
- Lenguaje de Programación GrafcetDocumento6 páginasLenguaje de Programación GrafcetjoseAún no hay calificaciones
- Deber de HistoriaDocumento9 páginasDeber de HistoriacamilaAún no hay calificaciones
- El Departamento de Pando Que Es El Más Joven Del PaísDocumento3 páginasEl Departamento de Pando Que Es El Más Joven Del PaísAyelen Aguilar CáceresAún no hay calificaciones
- CARTAPACIODocumento3 páginasCARTAPACIORudy Revolorio Blanco100% (1)
- Ensayo Vientre AlquilerDocumento6 páginasEnsayo Vientre AlquilerJhoann Valladares CarmonaAún no hay calificaciones
- Ingenieria CivilDocumento1 páginaIngenieria CivilDaniel CaychoAún no hay calificaciones
- Anexo 1 Ejercicios Tarea 2 16-01 2022Documento13 páginasAnexo 1 Ejercicios Tarea 2 16-01 2022Fabian GarciaAún no hay calificaciones
- El Mando y El Liderazgo en El Ejercicio de La Funcion Profesional - 1ra PteDocumento24 páginasEl Mando y El Liderazgo en El Ejercicio de La Funcion Profesional - 1ra PteMatías VeraAún no hay calificaciones
- H. R. JAUSS. Las Transformaciones de Lo ModernoDocumento214 páginasH. R. JAUSS. Las Transformaciones de Lo Modernoaupairinblue100% (1)
- Contrato de Desarrollo SoftwareDocumento4 páginasContrato de Desarrollo SoftwaremollyAún no hay calificaciones