También podría gustarte
- Maquinas HerramientasDocumento69 páginasMaquinas HerramientasDaniel SabinoAún no hay calificaciones
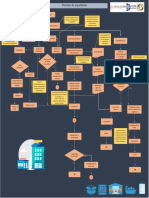
- Problemas de EquilibrioDocumento3 páginasProblemas de EquilibrioVictor FigueroaAún no hay calificaciones
- Claces de Tig, Mig Mag UNCPDocumento15 páginasClaces de Tig, Mig Mag UNCPJorge CamposAún no hay calificaciones
- Síntesis de MecanismosDocumento2 páginasSíntesis de Mecanismosmiguelangelbarrera100% (1)
- Tensor de Tensiones PDFDocumento34 páginasTensor de Tensiones PDFRuben Dario Ortiz FAún no hay calificaciones
- GUÍA Introducción A Los VectoresDocumento8 páginasGUÍA Introducción A Los VectoresESTEBAN ELIECER JIMENEZ MARTINEZAún no hay calificaciones
- Practica de VibracionesDocumento1 páginaPractica de VibracionesSteven MonárrezAún no hay calificaciones
- LAB#1 (Dinamica Aplicada)Documento11 páginasLAB#1 (Dinamica Aplicada)GabrielIsaiasFloresMurilloAún no hay calificaciones
- Ejercicios de EstaticaDocumento2 páginasEjercicios de EstaticaAbu AlarconAún no hay calificaciones
- Movimiento Acoplador - 5 PDFDocumento47 páginasMovimiento Acoplador - 5 PDFGballack Mtz TAún no hay calificaciones
- 1 Estructura de Un AutomatismoDocumento4 páginas1 Estructura de Un AutomatismoGermán Daniel MendozaAún no hay calificaciones
- MultimetroDocumento48 páginasMultimetroMelvin Gustavo Balladares RochaAún no hay calificaciones
- CNC Mauricio RecopilacionDocumento4 páginasCNC Mauricio Recopilacionjosuemg82Aún no hay calificaciones
- Cinética de Una Partícula: Impulso y Cantidad de MovimientoDocumento16 páginasCinética de Una Partícula: Impulso y Cantidad de MovimientoBrayam Qsp QuichuaAún no hay calificaciones
- Coeficiente de Variación y Desviación Media (Datos No Agrupados) GSDocumento6 páginasCoeficiente de Variación y Desviación Media (Datos No Agrupados) GSGustavo Adolfo Sanchez SolanoAún no hay calificaciones
- Sintésis Gráfica de EslabonamientoDocumento17 páginasSintésis Gráfica de EslabonamientoОлмедо ТриAún no hay calificaciones
- T11Documento9 páginasT11Ms Pringles09Aún no hay calificaciones
- Map A Conceptual 7Documento1 páginaMap A Conceptual 7Ivonne GrangerAún no hay calificaciones
- Prueba DiagnosticaDocumento2 páginasPrueba DiagnosticaSixto Alvarado SullcaAún no hay calificaciones
- T 10Documento9 páginasT 10Ms Pringles09Aún no hay calificaciones
- Conceptos VibracionesDocumento11 páginasConceptos VibracionesAldo Alvarez100% (1)
- Actividad 2 Control DigitalDocumento8 páginasActividad 2 Control DigitalLuis EnriqueAún no hay calificaciones
- Aplicación de Álgebra Lineal para El Ánalisis de Tensiones en Un Sólido en Equilibrio EstáticoDocumento9 páginasAplicación de Álgebra Lineal para El Ánalisis de Tensiones en Un Sólido en Equilibrio EstáticoantfelipeAún no hay calificaciones
- Diagramas y Polifonías. Experiencias de PensamientoDe EverandDiagramas y Polifonías. Experiencias de PensamientoAún no hay calificaciones
- Resumen Torque y Equilibrio de Un Cuerpo PDFDocumento27 páginasResumen Torque y Equilibrio de Un Cuerpo PDFmarco rafael arnedo gonzalezAún no hay calificaciones
- Glosario Unidad 4Documento2 páginasGlosario Unidad 4David Ocón100% (1)
- Plan de Mantenimiento NachiDocumento6 páginasPlan de Mantenimiento NachiUlises OrnelasAún no hay calificaciones
- Maquina HerramientaDocumento17 páginasMaquina HerramientaCesar Bojaca Prieto100% (1)
- X Hing at U Madre 78787879879Documento7 páginasX Hing at U Madre 78787879879jorgehernandezreyes0% (1)
- Trabajo y Energia PDFDocumento14 páginasTrabajo y Energia PDFHaydee López LozanoAún no hay calificaciones
- 1-Fluidos en Reposo y en MovimientoDocumento39 páginas1-Fluidos en Reposo y en MovimientoAntonio Alexander Sanchez ArroyoAún no hay calificaciones
- Historia Del Dibujo Técnico y Normalización en Los Formatos de PapelDocumento15 páginasHistoria Del Dibujo Técnico y Normalización en Los Formatos de PapelevertAún no hay calificaciones
- Diseño Mecánico PruebaDocumento16 páginasDiseño Mecánico PruebaOlger Baño TuquerresAún no hay calificaciones
- Brazos RoboticosDocumento12 páginasBrazos RoboticosSantiYaguargosAún no hay calificaciones
- Pruebas DestructivasDocumento9 páginasPruebas DestructivasLiz HerediaAún no hay calificaciones
- Procesos Que Provocan Desprendimiento de VirutaDocumento23 páginasProcesos Que Provocan Desprendimiento de VirutaJoseiito Jesus DAún no hay calificaciones
- Caracteristicas de Los Sistemas de Control Con RealimentacionDocumento10 páginasCaracteristicas de Los Sistemas de Control Con RealimentacionRossell Villarroel BayaAún no hay calificaciones
- Proyecto Mecanismo de LevaDocumento16 páginasProyecto Mecanismo de LevaCarlos Roberto Duarte AcostaAún no hay calificaciones
- Taller #3 - RugosidadDocumento12 páginasTaller #3 - RugosidadsamuelAún no hay calificaciones
- VistasDocumento8 páginasVistasIsi JulkAún no hay calificaciones
- Tolerancias GeometricasDocumento12 páginasTolerancias GeometricasHipolito Flores100% (1)
- Simbologia y Terminologia Isa y Sama 1Documento5 páginasSimbologia y Terminologia Isa y Sama 1Diana Paola Alvarado ToledoAún no hay calificaciones
- Modelado Matematico de Un Cuadricoptero v2Documento29 páginasModelado Matematico de Un Cuadricoptero v2Sebastian GuzmanAún no hay calificaciones
- Lab 1 Mecanismo INTRODUCCIONDocumento7 páginasLab 1 Mecanismo INTRODUCCIONGabo RocketPower MorenoAún no hay calificaciones
- Dinamica Resumen Capitulo 19Documento3 páginasDinamica Resumen Capitulo 19Gabriela ZamorioAún no hay calificaciones
- Diseño de LevasDocumento10 páginasDiseño de LevasVictor Torres ToAún no hay calificaciones
- Aceleración Media e InstantáneaDocumento4 páginasAceleración Media e InstantáneaRoraima Duin100% (2)
- Trip TicoDocumento4 páginasTrip TicoAndresAún no hay calificaciones
- Ej Res Op Basicas Vectores II PDFDocumento5 páginasEj Res Op Basicas Vectores II PDFNicolas FigueroaAún no hay calificaciones
- Practica 2 Raúl Hernández Sánchez 0A RobóticaDocumento11 páginasPractica 2 Raúl Hernández Sánchez 0A RobóticaRaúl Hernández SánchezAún no hay calificaciones
- Rosca MecanicaDocumento6 páginasRosca MecanicaRPBAún no hay calificaciones
- Respuesta en Frecuencia de Los Sistemas de ControlDocumento12 páginasRespuesta en Frecuencia de Los Sistemas de ControlJose BauzaAún no hay calificaciones
- Cinematica de La Particula! PDFDocumento91 páginasCinematica de La Particula! PDFGabri HelaAún no hay calificaciones
- Investigacion de Electronica Analogica.Documento17 páginasInvestigacion de Electronica Analogica.Eduardo JuárezAún no hay calificaciones
- c12 Diagrama de Raices Nuevo 2021-12-02 01-03-55Documento16 páginasc12 Diagrama de Raices Nuevo 2021-12-02 01-03-55Juancito ZcAún no hay calificaciones
- Informe 4 Matlab SISOTOOL Grupo3Documento12 páginasInforme 4 Matlab SISOTOOL Grupo3Edison ChicaizaAún no hay calificaciones
- Práctica de Laboratorio #5Documento8 páginasPráctica de Laboratorio #5jesus de la cruzAún no hay calificaciones
- Practica 10Documento9 páginasPractica 10Carlos Guerrero RodríguezAún no hay calificaciones
- Control de Sistemas: LinealesDocumento15 páginasControl de Sistemas: LinealespopiscaneAún no hay calificaciones
- Lab Control 1 2Documento8 páginasLab Control 1 2Rosana Gamboa RuizAún no hay calificaciones
- Tipos de ServidoresDocumento2 páginasTipos de ServidoresIbrahim Xaca ZepedaAún no hay calificaciones
- Los Sistemas de Información de La MercadotecniaDocumento17 páginasLos Sistemas de Información de La MercadotecniaIbrahim Xaca ZepedaAún no hay calificaciones
- Instrumentos de Mediciones DimensionalesDocumento11 páginasInstrumentos de Mediciones DimensionalesIbrahim Xaca ZepedaAún no hay calificaciones
- Construcción de Dispositivos ElectrónicosDocumento37 páginasConstrucción de Dispositivos ElectrónicosIbrahim Xaca ZepedaAún no hay calificaciones
- Manejo de Componentes ElectrónicosDocumento22 páginasManejo de Componentes ElectrónicosIbrahim Xaca ZepedaAún no hay calificaciones
- Diseño de La Interfaz de UsuarioDocumento6 páginasDiseño de La Interfaz de UsuarioIbrahim Xaca ZepedaAún no hay calificaciones
- Ciclo de Vida de Un ProductoDocumento2 páginasCiclo de Vida de Un ProductoIbrahim Xaca ZepedaAún no hay calificaciones
- Construcción de Dispositivos ElectrónicosDocumento39 páginasConstrucción de Dispositivos ElectrónicosIbrahim Xaca ZepedaAún no hay calificaciones
- Propiedades Acid en Transacciones de Base de DatosDocumento1 páginaPropiedades Acid en Transacciones de Base de DatosIbrahim Xaca ZepedaAún no hay calificaciones
- Proceso Administrativo (Triptico)Documento2 páginasProceso Administrativo (Triptico)Ibrahim Xaca ZepedaAún no hay calificaciones
- Experimento de OerstedDocumento3 páginasExperimento de OerstedIbrahim Xaca ZepedaAún no hay calificaciones
- Proceso de Toma de DecisionesDocumento6 páginasProceso de Toma de DecisionesIbrahim Xaca ZepedaAún no hay calificaciones
- Ramas de Ingeniería ElectrónicaDocumento20 páginasRamas de Ingeniería ElectrónicaIbrahim Xaca ZepedaAún no hay calificaciones
- Las Calles Con Baches y Los Problemas Que AcarreanDocumento5 páginasLas Calles Con Baches y Los Problemas Que AcarreanIbrahim Xaca ZepedaAún no hay calificaciones
- Guión Expo InformáticaDocumento6 páginasGuión Expo InformáticaIbrahim Xaca ZepedaAún no hay calificaciones
- La Conquista Espiritual y Material de Los Pueblos PrehispánicosDocumento1 páginaLa Conquista Espiritual y Material de Los Pueblos PrehispánicosIbrahim Xaca ZepedaAún no hay calificaciones
- Azure y Visual StudioDocumento7 páginasAzure y Visual StudioIbrahim Xaca ZepedaAún no hay calificaciones
- Proceso de ExportaciónDocumento1 páginaProceso de ExportaciónIbrahim Xaca ZepedaAún no hay calificaciones
- Las Calles Con Baches y Los Problemas Que AcarreanDocumento6 páginasLas Calles Con Baches y Los Problemas Que AcarreanIbrahim Xaca Zepeda100% (1)
- Cancer de MamaDocumento32 páginasCancer de MamaIbrahim Xaca Zepeda100% (1)
- Independencia de MéxicoDocumento11 páginasIndependencia de MéxicoIbrahim Xaca ZepedaAún no hay calificaciones
- Unidad 3 Comunicación HumanaDocumento9 páginasUnidad 3 Comunicación HumanaIbrahim Xaca ZepedaAún no hay calificaciones
- Cómo Influye La Alegría y La Felicidad en La Conducta Sexual en La AdolescenciaDocumento1 páginaCómo Influye La Alegría y La Felicidad en La Conducta Sexual en La AdolescenciaIbrahim Xaca ZepedaAún no hay calificaciones
- Comunicación HumanaDocumento8 páginasComunicación HumanaIbrahim Xaca ZepedaAún no hay calificaciones
- CONCLUSIONESDocumento2 páginasCONCLUSIONESIbrahim Xaca ZepedaAún no hay calificaciones
- Colegio Preparatorio de OrizabaDocumento2 páginasColegio Preparatorio de OrizabaIbrahim Xaca ZepedaAún no hay calificaciones
- COCOSDocumento42 páginasCOCOSIbrahim Xaca ZepedaAún no hay calificaciones
- Código Genético y Dogma CentralDocumento2 páginasCódigo Genético y Dogma CentralIbrahim Xaca ZepedaAún no hay calificaciones
- Protocolo Atencioìn DiscapacidadDocumento5 páginasProtocolo Atencioìn DiscapacidadGabriela PalominoAún no hay calificaciones
- Ética y Medio AmbienteDocumento7 páginasÉtica y Medio AmbienteEmilio DormondAún no hay calificaciones
- Cultivo Klebsiella y Proetus.Documento3 páginasCultivo Klebsiella y Proetus.Evelyn Dayanara Lino PeñafielAún no hay calificaciones
- Pensar en Ganar-GanarDocumento3 páginasPensar en Ganar-GanaradrianaAún no hay calificaciones
- Tipo 2 Ex Parcial Clase 3918 Resistencia Materiales 2021-1 Jueves 20 Mayo Upn Los OlivosDocumento1 páginaTipo 2 Ex Parcial Clase 3918 Resistencia Materiales 2021-1 Jueves 20 Mayo Upn Los Olivosjoe avilezAún no hay calificaciones
- Metodologías de La NemDocumento15 páginasMetodologías de La NemYazmin HernándezAún no hay calificaciones
- Plan de Acción MedioambientalDocumento8 páginasPlan de Acción MedioambientalJennifer RolleriAún no hay calificaciones
- Plan de Emergencias Incendios, Amoniaco, Sismo, Derrames, Inundaciones, Asalto, AtentadoDocumento32 páginasPlan de Emergencias Incendios, Amoniaco, Sismo, Derrames, Inundaciones, Asalto, AtentadoCHOP PROAún no hay calificaciones
- Eje 2 Comunicacion OrganizacionalDocumento13 páginasEje 2 Comunicacion OrganizacionalJhonatan Sierra VegaAún no hay calificaciones
- Informe 2 Ciencia y TecnologiaDocumento14 páginasInforme 2 Ciencia y TecnologiaGonzalo Benavente BascurAún no hay calificaciones
- Crucigrama Limpio PDFDocumento1 páginaCrucigrama Limpio PDFAmai PanAún no hay calificaciones
- Practica N°01 Geografía - Con ClavesDocumento10 páginasPractica N°01 Geografía - Con Claveslidelc.solisAún no hay calificaciones
- Pautac2 140 2021-1Documento5 páginasPautac2 140 2021-1Alejandro Caceres ZamoranoAún no hay calificaciones
- 2013 Quantification of The GSI Chart - En.esDocumento9 páginas2013 Quantification of The GSI Chart - En.esJenifer Ale Leiva RomeroAún no hay calificaciones
- Euroetika Ltda. (Fumig-Cr) PDFDocumento5 páginasEuroetika Ltda. (Fumig-Cr) PDFIVONN VELASQUEZAún no hay calificaciones
- Proyecto de InvestigacionDocumento9 páginasProyecto de InvestigacionluisaAún no hay calificaciones
- Concepto de Ficha TecnicaDocumento3 páginasConcepto de Ficha TecnicaandresfeliecvAún no hay calificaciones
- Maria RiosDocumento24 páginasMaria Riosalejitha rios moyaAún no hay calificaciones
- Análisis Del Texto El Cuerpo Humano y Sus VericuetosDocumento8 páginasAnálisis Del Texto El Cuerpo Humano y Sus VericuetosElizabeth BuendiaAún no hay calificaciones
- Silabus 2024-1 - Regular - CienciasDocumento1 páginaSilabus 2024-1 - Regular - Cienciassergio roldanAún no hay calificaciones
- Paradigmas de La PedagogíaDocumento9 páginasParadigmas de La PedagogíaFrank ToroAún no hay calificaciones
- DPCC 2doDocumento51 páginasDPCC 2doLENIN VEGA100% (1)
- Material de Conocimientos Basicos SucreDocumento25 páginasMaterial de Conocimientos Basicos SucreJosé FlorezAún no hay calificaciones
- Ejercicios de LocalizaciónDocumento9 páginasEjercicios de LocalizaciónKatleen Carolina Fuentes RiosAún no hay calificaciones
- La ComunicacionDocumento6 páginasLa ComunicacionEco TropicalAún no hay calificaciones
- 07 - Matins - Bourdieu, P. & Christin, R. (2015) - La Construcción Del Mercado.Documento44 páginas07 - Matins - Bourdieu, P. & Christin, R. (2015) - La Construcción Del Mercado.jgdws89jb4Aún no hay calificaciones
- Pes Asistente Administrativo - Modulo 3Documento18 páginasPes Asistente Administrativo - Modulo 3Daniel Tarazona DurandAún no hay calificaciones
- Técnica HistológicaDocumento4 páginasTécnica HistológicaFernando VazquezAún no hay calificaciones
- Cuento Realista 3roDocumento6 páginasCuento Realista 3rosashaAún no hay calificaciones
- PRÁCTICA CALIFICADA Nro 01 DE FUNDAMENTOS DE DINÁMICA 21931Documento2 páginasPRÁCTICA CALIFICADA Nro 01 DE FUNDAMENTOS DE DINÁMICA 21931Nicolas Lima0% (1)