También podría gustarte
- Computación Física: Explorando la visión por computadora en la computación físicaDe EverandComputación Física: Explorando la visión por computadora en la computación físicaAún no hay calificaciones
- El Robot y Sus ComponentesDocumento4 páginasEl Robot y Sus ComponentesEdgar Antonio Rocha SolísAún no hay calificaciones
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Partes de Un RobotDocumento3 páginasPartes de Un RobotMariano Ënriquë Dë JësusAún no hay calificaciones
- robot móvil: Liberando el potencial visionario de los robots móvilesDe Everandrobot móvil: Liberando el potencial visionario de los robots móvilesAún no hay calificaciones
- Partes de Un Robot Industrial+2022Documento4 páginasPartes de Un Robot Industrial+2022Perico LópezAún no hay calificaciones
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Foro de Robotica IndustrialDocumento15 páginasForo de Robotica IndustrialArturo Tapia SolisAún no hay calificaciones
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Morales Vergara Jared 6im10 Practica 2Documento7 páginasMorales Vergara Jared 6im10 Practica 2Jared MoralesAún no hay calificaciones
- Morfología Robot IndustrialDocumento18 páginasMorfología Robot IndustrialsilvanaAún no hay calificaciones
- Taller de Tecnología 2Documento6 páginasTaller de Tecnología 2Felipe Ramirez CardozoAún no hay calificaciones
- Factores de Producción de La Robótica IndustrialDocumento12 páginasFactores de Producción de La Robótica IndustrialDeyRNAún no hay calificaciones
- 18 03 2020bDocumento12 páginas18 03 2020bRocha RabitAún no hay calificaciones
- Estructura de Un Robot IndustrialDocumento3 páginasEstructura de Un Robot IndustrialJose Rios NuñezAún no hay calificaciones
- Componentes ExternosDocumento3 páginasComponentes ExternosJOSE RAMON PACHECO LEYVAAún no hay calificaciones
- ROBOTICADocumento5 páginasROBOTICAvictoria stherAún no hay calificaciones
- Cinematica y Dinamica de Un Brazo RobotDocumento15 páginasCinematica y Dinamica de Un Brazo RobotSaid Jara0% (1)
- 2 Robotica Industrial Definicion Caracteristicas AplicacionesDocumento22 páginas2 Robotica Industrial Definicion Caracteristicas AplicacionesDemetrio Hinojosa EAún no hay calificaciones
- KUKA Primer InformeDocumento47 páginasKUKA Primer InformeAlexis VladimirAún no hay calificaciones
- Componentes Externos Del RobotDocumento6 páginasComponentes Externos Del RobotJOSE RAMON PACHECO LEYVAAún no hay calificaciones
- Robótica Industrial FunciónDocumento8 páginasRobótica Industrial FunciónJorge Elias Moscoso SanchezAún no hay calificaciones
- 4.6 Comunicación de Robot Con Dispositivos de ControlDocumento8 páginas4.6 Comunicación de Robot Con Dispositivos de ControlStarkream28Aún no hay calificaciones
- INTELIGENCIADocumento13 páginasINTELIGENCIAggomezAún no hay calificaciones
- Actividad 5Documento5 páginasActividad 5alfredoAún no hay calificaciones
- 2 Componentes de Un Robot IndustrialDocumento26 páginas2 Componentes de Un Robot IndustrialJorge L. Aguilar Martínez100% (1)
- C9 RoboticaDocumento39 páginasC9 Roboticamonica cuti magañoAún no hay calificaciones
- 3 - El Sistema RobóticoDocumento6 páginas3 - El Sistema RobóticoRodrigo Loz67% (3)
- Marco Teorico y Aplicaciones Del ProyectoDocumento48 páginasMarco Teorico y Aplicaciones Del Proyectogabriel chunga yucraAún no hay calificaciones
- La Robotica 3ra GuiaDocumento11 páginasLa Robotica 3ra GuiaFelipe Ramirez CardozoAún no hay calificaciones
- Robotica GeneralidadesDocumento8 páginasRobotica GeneralidadesJuan Carlos LudwigAún no hay calificaciones
- Elementos Constitutivos de Un Robot IndustrialDocumento6 páginasElementos Constitutivos de Un Robot Industrialalejandro urbinaAún no hay calificaciones
- RobotsDocumento21 páginasRobotsMcPaul Dot100% (1)
- 2 Componentes de Un Robot IndustrialDocumento21 páginas2 Componentes de Un Robot IndustrialEmilio Salazar HernandezAún no hay calificaciones
- Robots SerialesDocumento21 páginasRobots SerialesJuan GuzmanAún no hay calificaciones
- Concepto de RoboticaDocumento26 páginasConcepto de Roboticabomaye10% (1)
- Estructura de Un Robot IndustrialDocumento22 páginasEstructura de Un Robot IndustrialMiroslava GalvánAún no hay calificaciones
- Guia CirosDocumento91 páginasGuia CirosHéctor PeñaAún no hay calificaciones
- DeR C3 M1 Clase 4Documento30 páginasDeR C3 M1 Clase 4silvanaAún no hay calificaciones
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAún no hay calificaciones
- Procesos de Manufactura. Tarea 2Documento4 páginasProcesos de Manufactura. Tarea 2Oscar LópezAún no hay calificaciones
- Aporte RoboticaDocumento4 páginasAporte RoboticaonlyAún no hay calificaciones
- Informe Brazo RobóticoDocumento18 páginasInforme Brazo RobóticoRyan Hudson100% (2)
- Mecanismo RoboticoDocumento9 páginasMecanismo RoboticoclintonAún no hay calificaciones
- Resumen Examen SelecDocumento60 páginasResumen Examen SelecLeo FariaAún no hay calificaciones
- Exposicion RoboticaDocumento28 páginasExposicion RoboticakevinAún no hay calificaciones
- DISEÑO DE UN BRAZO ROBαTICO POLAR PARA CONTROL DE CALIDAD EN LA INDUSTRIADocumento13 páginasDISEÑO DE UN BRAZO ROBαTICO POLAR PARA CONTROL DE CALIDAD EN LA INDUSTRIAWelner PerezAún no hay calificaciones
- Introducción Control de Robots ManipuladoresDocumento12 páginasIntroducción Control de Robots Manipuladoresaeros91Aún no hay calificaciones
- Anatomía Del RobotDocumento3 páginasAnatomía Del RobotArmando JesusAún no hay calificaciones
- Componentes de Un RobotDocumento3 páginasComponentes de Un RobotYoo Puees50% (2)
- AhoraDocumento5 páginasAhoraPiero CanoAún no hay calificaciones
- Poliamidas - (Grupo 4)Documento5 páginasPoliamidas - (Grupo 4)JULIAN DAVID MARTIN HERNANDEZAún no hay calificaciones
- 1MM2 Mendoza Gonzalez Felipe Practica 1Documento6 páginas1MM2 Mendoza Gonzalez Felipe Practica 1Felipe Mendoza GonzálezAún no hay calificaciones
- tr1 Robotica Industrial SenatiDocumento16 páginastr1 Robotica Industrial Senatimaycol mamani huillaca100% (1)
- Tema 1.2 Estructura Mecánica de Un RobotDocumento10 páginasTema 1.2 Estructura Mecánica de Un RobotYami CortezAún no hay calificaciones
- Control Numerico ExpoDocumento19 páginasControl Numerico ExpoJorge ZozayaAún no hay calificaciones
- Robot MitsubishiDocumento25 páginasRobot MitsubishiLupita Roque Gil100% (1)
- Practica 7 MecfDocumento10 páginasPractica 7 MecfEdgar ZepedaAún no hay calificaciones
- CuestonarioDocumento4 páginasCuestonarioSofía S. ZambranoAún no hay calificaciones
- Clasificación de Los Robots IndustrialesDocumento2 páginasClasificación de Los Robots IndustrialesMario BustilloAún no hay calificaciones
- Tecnologías Limpias en La Industria TextilDocumento25 páginasTecnologías Limpias en La Industria TextilSarahMuñozAAún no hay calificaciones
- Quiz 3 BalanceDocumento8 páginasQuiz 3 Balancejennifer9657Aún no hay calificaciones
- Cert de Camara de Comercio - Abril 09-2019Documento4 páginasCert de Camara de Comercio - Abril 09-2019Armando ManotasAún no hay calificaciones
- Presentacion Corta en Contrataciones Publicas IcgDocumento103 páginasPresentacion Corta en Contrataciones Publicas IcgGuido Fidel Ramirez TamayoAún no hay calificaciones
- Ebook 5 Reclutamiento y SeleccionDocumento80 páginasEbook 5 Reclutamiento y SeleccionMaría Fabiola MoralesAún no hay calificaciones
- Ficha SDR-41 AlDocumento4 páginasFicha SDR-41 AlNelson JuniorAún no hay calificaciones
- Concreto en Climas CálidosDocumento18 páginasConcreto en Climas CálidosHowl OkamiAún no hay calificaciones
- Crisis Transporte IOPDocumento2 páginasCrisis Transporte IOPAndrea Margarita Osorio LopezAún no hay calificaciones
- Determinacion de FosfatosDocumento7 páginasDeterminacion de FosfatosJose Kalvin Rojas SosaAún no hay calificaciones
- YorokobuDocumento100 páginasYorokobujosedora1100% (1)
- Plan de Trabajo Sva 2018Documento22 páginasPlan de Trabajo Sva 2018leydi vanessaAún no hay calificaciones
- Manual de Servicio TV LG RP-21FD15, RP-21FD15G (Chasis MC-059A)Documento23 páginasManual de Servicio TV LG RP-21FD15, RP-21FD15G (Chasis MC-059A)carg666100% (1)
- TALLER-Unidad 1 - Conceptos Básicos de Accidentes de TrabajoDocumento24 páginasTALLER-Unidad 1 - Conceptos Básicos de Accidentes de TrabajoValentina GUERRERO MARMOLEJOAún no hay calificaciones
- Segundo Parcial - PROGRAMACIONDocumento5 páginasSegundo Parcial - PROGRAMACIONjeremias aquinoAún no hay calificaciones
- Cables y ConexionesDocumento17 páginasCables y ConexionesHwks DeepAún no hay calificaciones
- Capitulo 5 MicroeconomiaDocumento4 páginasCapitulo 5 MicroeconomiaSabino GarciaAún no hay calificaciones
- Laboratorio de Microeconomia IDocumento12 páginasLaboratorio de Microeconomia Inelida barrera vargasAún no hay calificaciones
- Clase 3 Dinero en Equilibrio GeneralDocumento37 páginasClase 3 Dinero en Equilibrio GeneralJohn CubaAún no hay calificaciones
- 6 MATRIZ de Seguridad Line BaseDocumento8 páginas6 MATRIZ de Seguridad Line BaseFranklin Perez SevillanoAún no hay calificaciones
- UD 6 PPT Entorno Virtual de AprendiajeDocumento28 páginasUD 6 PPT Entorno Virtual de AprendiajeManuel FerrandoAún no hay calificaciones
- Práctica 3Documento7 páginasPráctica 3Luis Herrador CruzAún no hay calificaciones
- Caso Practico 2Documento2 páginasCaso Practico 2Arturo Lobatón0% (1)
- C2 - Re - Ejercicios Propuestos - T03Documento2 páginasC2 - Re - Ejercicios Propuestos - T03Eliana Porras AntónAún no hay calificaciones
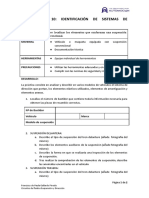
- P10 - Identificación de Los Sistemas de SuspensiónDocumento2 páginasP10 - Identificación de Los Sistemas de Suspensiónartem sAún no hay calificaciones
- Consecuencias o Barreras de Los Comerciantes Al Exportar o Importar MercanciaDocumento3 páginasConsecuencias o Barreras de Los Comerciantes Al Exportar o Importar MercanciaAlejo LondoñoAún no hay calificaciones
- Cimipyme 2015 PDFDocumento1411 páginasCimipyme 2015 PDFCarlos Eduardo Castaño RiosAún no hay calificaciones
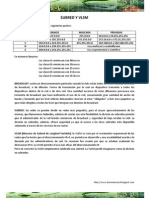
- Practica Subred y VLSMDocumento8 páginasPractica Subred y VLSMjhormancely100% (2)
- SEMANA 1 Merged MergedDocumento142 páginasSEMANA 1 Merged MergedJessenia CarreraAún no hay calificaciones
- XVII - Modelos de Negocio en InternetDocumento10 páginasXVII - Modelos de Negocio en InternetMarioAún no hay calificaciones
- Teoria de La AdministracionDocumento55 páginasTeoria de La AdministracionCarlos Saenz LazoAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- GuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaDe EverandGuíaBurros: El controller de empresa: Cómo realizar el control total de tu empresaAún no hay calificaciones
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Python Deep Learning: Introducción práctica con Keras y TensorFlow 2De EverandPython Deep Learning: Introducción práctica con Keras y TensorFlow 2Calificación: 3.5 de 5 estrellas3.5/5 (5)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasDe EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasAún no hay calificaciones
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónDe EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónCalificación: 2 de 5 estrellas2/5 (1)
- Guía de aplicacion de la ISO 9001:2015De EverandGuía de aplicacion de la ISO 9001:2015Calificación: 5 de 5 estrellas5/5 (3)