También podría gustarte
- Protocolos de ComunicacionDocumento8 páginasProtocolos de ComunicacionLUIS FERNANDO GUIJARRO MOLINAAún no hay calificaciones
- Topología de La RedDocumento4 páginasTopología de La RedBruno Daniel100% (1)
- Valvula WastegateDocumento8 páginasValvula WastegateJesus OlivaresAún no hay calificaciones
- Clase 2 Pid SDocumento36 páginasClase 2 Pid SCarlos Alberto Ramirez LópezAún no hay calificaciones
- Mecatronica AutomotrizDocumento15 páginasMecatronica AutomotrizSadot Mauly100% (1)
- Silverado 2005Documento3 páginasSilverado 2005DAVID COBO100% (1)
- Descripcion de Una Interfaz OBDII Parte 3 PDFDocumento6 páginasDescripcion de Una Interfaz OBDII Parte 3 PDFcristian100% (1)
- Sensor de Oxigeno Ceta ElectronicaDocumento36 páginasSensor de Oxigeno Ceta ElectronicaErick Andia100% (1)
- Sensor MAP - Inyección Electrónica.Documento6 páginasSensor MAP - Inyección Electrónica.Héctor CangásAún no hay calificaciones
- BobinasDocumento27 páginasBobinasFederico VasilchukAún no hay calificaciones
- Full CanDocumento36 páginasFull CanSergio Antonio Muñoz BritoAún no hay calificaciones
- Normas ISO DIN ANSI JIS para Dibujo TécnicoDocumento4 páginasNormas ISO DIN ANSI JIS para Dibujo TécnicoJesus David Sánchez ZapataAún no hay calificaciones
- Amod Amod-611 Manual 002Documento55 páginasAmod Amod-611 Manual 002Diego Aarón Avendaño100% (1)
- Diagnostico Del Motor DieselDocumento186 páginasDiagnostico Del Motor DieselTony Ramiro Soto Paucar100% (2)
- Obdii PDFDocumento34 páginasObdii PDFRoberto Rincon RoblesAún no hay calificaciones
- DSO2000 Series Digital Storage Oscilloscope User Manual - Compressed v2 Traducido PDFDocumento67 páginasDSO2000 Series Digital Storage Oscilloscope User Manual - Compressed v2 Traducido PDFivan yesid becerra100% (1)
- Introducción A Señales Electrónicas Del MotorDocumento12 páginasIntroducción A Señales Electrónicas Del MotorVANESAAún no hay calificaciones
- Nissan-Murano 2011 ES-MX MX Fcfff32610Documento537 páginasNissan-Murano 2011 ES-MX MX Fcfff32610Jorge MirandaAún no hay calificaciones
- Diagnóstico Con Un Scanner AutomotrizDocumento2 páginasDiagnóstico Con Un Scanner AutomotrizJavier De La RosaAún no hay calificaciones
- Sensor EGODocumento14 páginasSensor EGOsmithAún no hay calificaciones
- Evaluar Sensores y Actuadores.Documento24 páginasEvaluar Sensores y Actuadores.SEBASTIAN FELIPE GOMEZ CELISAún no hay calificaciones
- Autodata PresentacionDocumento11 páginasAutodata Presentaciondaher villarroel100% (1)
- Sensor TEMPERATURADocumento9 páginasSensor TEMPERATURAGustavo Antonio Bustamante CarrilloAún no hay calificaciones
- Como Programar Mariposa ElectronicaDocumento1 páginaComo Programar Mariposa ElectronicaDanielAún no hay calificaciones
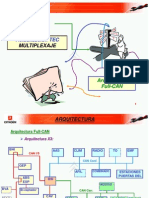
- Technologia MULTIPLEXAJEDocumento22 páginasTechnologia MULTIPLEXAJEDiego Vergara PinoAún no hay calificaciones
- Conectiviad y RedesDocumento51 páginasConectiviad y RedesYanh Nicolas Castillo DiazAún no hay calificaciones
- Instituto Tecnológico "Don Bosco: Carrera: Mecánica AutomotrizDocumento8 páginasInstituto Tecnológico "Don Bosco: Carrera: Mecánica AutomotrizLIMBERT ANTONIO HUANCA CORONEL100% (1)
- 3 Nociones Básicas MultiplexadoDocumento37 páginas3 Nociones Básicas MultiplexadoJaime Mauricio González GuzmánAún no hay calificaciones
- Control Del Funcionamiento de Sensores Actuadores y Verificación de La Ecu Mediante La Implementación de Un Motor Virtual para La Escuela de Ingeniería Automotriz.Documento16 páginasControl Del Funcionamiento de Sensores Actuadores y Verificación de La Ecu Mediante La Implementación de Un Motor Virtual para La Escuela de Ingeniería Automotriz.Israel MariñoAún no hay calificaciones
- Sensores y Actuadores Del AutomovilDocumento10 páginasSensores y Actuadores Del AutomovilEmanuel AguerreAún no hay calificaciones
- Sistemas de Inyección ElectrónicaDocumento20 páginasSistemas de Inyección ElectrónicaAlex Tipán SuarezAún no hay calificaciones
- Activación Del Sistema de Encendido Desde La Unidad de Control Electrónica Parte 1 (ATP)Documento19 páginasActivación Del Sistema de Encendido Desde La Unidad de Control Electrónica Parte 1 (ATP)Jhonn YorinAún no hay calificaciones
- Sistemas de inyección directa de gasolinaDocumento82 páginasSistemas de inyección directa de gasolinaCristian Salinas100% (1)
- Manual Caja RS232Documento8 páginasManual Caja RS232checko_1258Aún no hay calificaciones
- Manual NSSWDocumento95 páginasManual NSSWMauricio Portillo G.Aún no hay calificaciones
- Qué es el sensor TPS y cómo funcionaDocumento5 páginasQué es el sensor TPS y cómo funcionaFerdinand Mamani marquez100% (1)
- Descripcion de Una Interfaz OBDII Parte 4 PDFDocumento5 páginasDescripcion de Una Interfaz OBDII Parte 4 PDFOscar GutierrezAún no hay calificaciones
- Cómo probar bobinas de encendido sin circuito de potenciaDocumento18 páginasCómo probar bobinas de encendido sin circuito de potenciaLuis MezaAún no hay calificaciones
- Clase 01 TaDocumento70 páginasClase 01 TaJhon MurilloAún no hay calificaciones
- Resumen Basico de Sensores y ActuadoresDocumento10 páginasResumen Basico de Sensores y ActuadoresNachoAún no hay calificaciones
- Sen SoresDocumento7 páginasSen SoresDavid Castaño CardonaAún no hay calificaciones
- Diagnóstico y pruebas del sensor de temperatura de aire de admisión (IATDocumento3 páginasDiagnóstico y pruebas del sensor de temperatura de aire de admisión (IATJuan Jose100% (1)
- Diagnosis Nissan SentraDocumento1 páginaDiagnosis Nissan Sentradavid orellana100% (1)
- Manual Multipexado GMDocumento37 páginasManual Multipexado GMAndrésMartínAún no hay calificaciones
- Curso ABS-ESP: Diagnóstico con escánerDocumento18 páginasCurso ABS-ESP: Diagnóstico con escánerAbraham CordovasotoAún no hay calificaciones
- Protocolos OBDIIDocumento5 páginasProtocolos OBDIIBaltasar Elias CervantesAún no hay calificaciones
- Electricidad y Eelectronica Automotriz A DescargarDocumento5 páginasElectricidad y Eelectronica Automotriz A DescargarJohAny BustamanteAún no hay calificaciones
- Sensores y actuadores en el sistema de inyección electrónicaDocumento105 páginasSensores y actuadores en el sistema de inyección electrónicaLestat Allan PoeAún no hay calificaciones
- Macr33 U1 DR1Documento24 páginasMacr33 U1 DR1maximo saavedra castilloAún no hay calificaciones
- Seat LineasDocumento15 páginasSeat LineasRobertoRococaAún no hay calificaciones
- Presentación para CFIE - MultiplexadoDocumento20 páginasPresentación para CFIE - MultiplexadoMatias NeiraAún no hay calificaciones
- FusiblesDocumento4 páginasFusiblesIsrael TrejoAún no hay calificaciones
- Module PCMDocumento3 páginasModule PCMJulio Cesar MartinezAún no hay calificaciones
- 21 B Aprendizaje de Sensor CKPDocumento7 páginas21 B Aprendizaje de Sensor CKPJose HuescaAún no hay calificaciones
- Manual Reparacion EcuspdfDocumento109 páginasManual Reparacion Ecuspdfrafael alcantaraAún no hay calificaciones
- Sensores & ModulosDocumento7 páginasSensores & ModulosBryan Patricio Maurat ChambaAún no hay calificaciones
- Sensores T.S JavierDocumento58 páginasSensores T.S JavierIvana Esilda Velasco IllescasAún no hay calificaciones
- Leccion 7 Programa MasterDocumento26 páginasLeccion 7 Programa MasterLuis AlfonsoAún no hay calificaciones
- Protocolo de Comunicacion Sae j1850 en Vehiculo AmericanoDocumento14 páginasProtocolo de Comunicacion Sae j1850 en Vehiculo AmericanoCristian Cerna100% (5)
- Conector para El DiagnosticoDocumento14 páginasConector para El Diagnosticopablo barriosAún no hay calificaciones
- Convenio Interinstitucional para PrácticaDocumento4 páginasConvenio Interinstitucional para PrácticaDieguito GutierrezAún no hay calificaciones
- Formulario de Registro de Actividades Semanales IDocumento1 páginaFormulario de Registro de Actividades Semanales IDieguito GutierrezAún no hay calificaciones
- RegistroActividadesMecánicaAutomotrizDocumento1 páginaRegistroActividadesMecánicaAutomotrizDieguito GutierrezAún no hay calificaciones
- Formulario de Registro de Actividades SemanalesDocumento1 páginaFormulario de Registro de Actividades SemanalesDieguito GutierrezAún no hay calificaciones
- Ficha de Inscripcion para PracticaDocumento3 páginasFicha de Inscripcion para PracticaDieguito GutierrezAún no hay calificaciones
- Capítulo IVDocumento10 páginasCapítulo IVJavier PachecoAún no hay calificaciones
- Bibliotecas de Lenguaje C Comandos Printf y ScanfDocumento5 páginasBibliotecas de Lenguaje C Comandos Printf y ScanfB1Aún no hay calificaciones
- Nivel 1, Leccion 2Documento5 páginasNivel 1, Leccion 2jualdacam50% (6)
- Lab 01 - Creación de Diagramas de Flujo y PseudocódigosDocumento11 páginasLab 01 - Creación de Diagramas de Flujo y PseudocódigosNilda BozaAún no hay calificaciones
- MIPSDocumento6 páginasMIPSAlberth Yair PorrasAún no hay calificaciones
- Office Todas Las Versiones (A Partir de Version 97)Documento57 páginasOffice Todas Las Versiones (A Partir de Version 97)GABRIELAAún no hay calificaciones
- Reporte - 2 Rectificacion No Controlada MonofasicaDocumento13 páginasReporte - 2 Rectificacion No Controlada MonofasicaCarlos Daniel Garcia QuinteroAún no hay calificaciones
- Xmart-Solar-Inverters-V08 191119Documento85 páginasXmart-Solar-Inverters-V08 191119Javier Mosquera CarrilloAún no hay calificaciones
- Hot SpotDocumento8 páginasHot SpotLuis GonzalezAún no hay calificaciones
- Actividad 2 - Algoritmos y Estructura de DatosDocumento9 páginasActividad 2 - Algoritmos y Estructura de DatostonyAún no hay calificaciones
- Manual de Desemsamble, Mantenimiento de PCDocumento40 páginasManual de Desemsamble, Mantenimiento de PCjordan100% (1)
- Guía Práctica Configuracion FTPDocumento13 páginasGuía Práctica Configuracion FTPOlgaAún no hay calificaciones
- Manual Básico Packet Tracer.02Documento30 páginasManual Básico Packet Tracer.02Richard TorneyAún no hay calificaciones
- Lab 8Documento20 páginasLab 8ERICK HUILLCA HUAMANQUISPEAún no hay calificaciones
- Circuito IntegradoDocumento6 páginasCircuito IntegradopepeAún no hay calificaciones
- Tesis Ensamblaje de PCDocumento100 páginasTesis Ensamblaje de PCRaul Alor VenturaAún no hay calificaciones
- Arreglos UnidimensionalesDocumento25 páginasArreglos UnidimensionalesMILENE DAMARIS RAMIREZ TUYAAún no hay calificaciones
- Creacion de Cuenta Gratis para AS400Documento51 páginasCreacion de Cuenta Gratis para AS400leo_omarAún no hay calificaciones
- Glosario de cableado estructuradoDocumento11 páginasGlosario de cableado estructuradoManuelAún no hay calificaciones
- Lenguajes programación Prolog Mercury Gödel Datalog SequenceLDocumento3 páginasLenguajes programación Prolog Mercury Gödel Datalog SequenceLSalvador GarzaAún no hay calificaciones
- Practica 6.7 Arranque de La PCDocumento5 páginasPractica 6.7 Arranque de La PCMarco Rodriguez GarciaAún no hay calificaciones
- PBI Seguridad de Power BI - Power BI - Microsoft LearnDocumento5 páginasPBI Seguridad de Power BI - Power BI - Microsoft LearnJose DiazAún no hay calificaciones
- Evaluación 1er Parcial - A00102582Documento8 páginasEvaluación 1er Parcial - A00102582JosueAún no hay calificaciones
- EDD s09 PilasDocumento1 páginaEDD s09 PilasOhYesAún no hay calificaciones
- PEC1 - Administración de Sistemas GNU-LINUX - Inés María Oliveros HDocumento14 páginasPEC1 - Administración de Sistemas GNU-LINUX - Inés María Oliveros HinesmaoAún no hay calificaciones
- Modelos arquitectónicos de sistemas distribuidosDocumento32 páginasModelos arquitectónicos de sistemas distribuidosLuna JoseAún no hay calificaciones
- CoDeSys V3.5.7 - AnalogInput - PosicionDocumento6 páginasCoDeSys V3.5.7 - AnalogInput - PosicionKevinAún no hay calificaciones
- Diagramas y Simbología Electrónica (Lección3)Documento5 páginasDiagramas y Simbología Electrónica (Lección3)Alonso Higuera RochinAún no hay calificaciones
- Kilsen 2017Documento190 páginasKilsen 2017jesusAún no hay calificaciones
- Manual de Utilidades y Trucos de PC 5 (162 Pag)Documento162 páginasManual de Utilidades y Trucos de PC 5 (162 Pag)guillermolgAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Cómo ser un Ninja Social: Supera el miedo a hablar con desconocidos, crea conexiones con cualquiera y se la persona más interesante del lugarDe EverandCómo ser un Ninja Social: Supera el miedo a hablar con desconocidos, crea conexiones con cualquiera y se la persona más interesante del lugarCalificación: 4.5 de 5 estrellas4.5/5 (4)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- EL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.De EverandEL PLAN DE NEGOCIOS DE UNA FORMA SENCILLA. La guía práctica que ayuda a poner en marcha nuevos proyectos e ideas empresariales.Calificación: 4 de 5 estrellas4/5 (20)
- Fundamentos de Programación: Diagramas de flujo, Diagramas N-S, Pseudocódigo y JavaDe EverandFundamentos de Programación: Diagramas de flujo, Diagramas N-S, Pseudocódigo y JavaAún no hay calificaciones
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialDe EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones
- Minería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásDe EverandMinería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásCalificación: 4.5 de 5 estrellas4.5/5 (4)