También podría gustarte
- TAREA #5. Controladores y CompensadoresDocumento5 páginasTAREA #5. Controladores y CompensadoresVictor Hugo0% (1)
- Desarrollo Socioafectivo y de La PersonalidadDocumento330 páginasDesarrollo Socioafectivo y de La Personalidadpsicveromar100% (9)
- Tarea 1Documento11 páginasTarea 1ELIAN EDMUNDO ARENAS YATACOAún no hay calificaciones
- Diseño de Controladores Discretos LGR 2013-2Documento9 páginasDiseño de Controladores Discretos LGR 2013-2Mariana Zacarias LeslieAún no hay calificaciones
- Grupo N°14 - Presiones en Muros y RompeolasDocumento18 páginasGrupo N°14 - Presiones en Muros y RompeolasDenny Azumi ZurinairaAún no hay calificaciones
- CD Exam2 Jul2015Documento1 páginaCD Exam2 Jul2015dilia cAún no hay calificaciones
- Segundo Parcial de Control 1 2021-03Documento2 páginasSegundo Parcial de Control 1 2021-03Jhon Taylor Usma HurtadoAún no hay calificaciones
- Practica 6 PDFDocumento6 páginasPractica 6 PDFAlejandro Tello VargasAún no hay calificaciones
- Control DigitalDocumento4 páginasControl DigitalLuis Daniel Hernández MartínezAún no hay calificaciones
- Examen Sist CTRLDocumento3 páginasExamen Sist CTRLErnesto ArzabalaAún no hay calificaciones
- Práctica 4Documento9 páginasPráctica 4Alberto Millán Jr.Aún no hay calificaciones
- K2 (Ir + - 6.93) (Ra +: G(S) Frs Las) + K2K3 SDocumento3 páginasK2 (Ir + - 6.93) (Ra +: G(S) Frs Las) + K2K3 SMiguel Angel Chuquín MorachimoAún no hay calificaciones
- EjerciciosCM17-2 - Corte1 Repaso Control ClasicoDocumento3 páginasEjerciciosCM17-2 - Corte1 Repaso Control ClasicoAndres OchoaAún no hay calificaciones
- PR Actica 8: Dise No de Compensadores Mediante Respuesta en FrecuenciaDocumento7 páginasPR Actica 8: Dise No de Compensadores Mediante Respuesta en FrecuenciaJoshua LeónAún no hay calificaciones
- Examen Final de Control 1 2020-03 Juan MartinezDocumento1 páginaExamen Final de Control 1 2020-03 Juan MartinezSTEVEN ALEXANDER CHAMPUTIZ VILLOTAAún no hay calificaciones
- Curso de Control Práctico12Documento8 páginasCurso de Control Práctico12chalpasAún no hay calificaciones
- Diseño Frecuencial-Compensadores Por AtrasoDocumento19 páginasDiseño Frecuencial-Compensadores Por AtrasoFacundo HerreraAún no hay calificaciones
- Deber 9 - 20BDocumento4 páginasDeber 9 - 20BAlex Romero BustosAún no hay calificaciones
- Tarea 1 Ingenieria de Control Moderno 2021Documento3 páginasTarea 1 Ingenieria de Control Moderno 2021Heiidii ZhacaRiias MarthinezAún no hay calificaciones
- Ejercicio Pi and RSTDocumento1 páginaEjercicio Pi and RSTgabriel salazarAún no hay calificaciones
- Control 5Documento3 páginasControl 5steeven armasAún no hay calificaciones
- PreguntasDocumento8 páginasPreguntasBartomeuAún no hay calificaciones
- Hoja de Problemas #1Documento5 páginasHoja de Problemas #1Dany VergaraAún no hay calificaciones
- Redes de CompensaciónDocumento5 páginasRedes de CompensaciónJhony SiguenzaAún no hay calificaciones
- 2.1 .-CompendomfrecuenciaDocumento105 páginas2.1 .-Compendomfrecuenciamayquer lin delgadillo perezAún no hay calificaciones
- Diseño Por Retardo de Fase Utilizando El Diagrama de BodeDocumento30 páginasDiseño Por Retardo de Fase Utilizando El Diagrama de BodeVikthor Lopez100% (1)
- Diseño Frecuencial - Compensador Por Adelanto de FaseDocumento18 páginasDiseño Frecuencial - Compensador Por Adelanto de FaseFacundo HerreraAún no hay calificaciones
- CompensadoresDocumento46 páginasCompensadoresWilliam AndresAún no hay calificaciones
- Laboratorio 2Documento11 páginasLaboratorio 2ELIAN EDMUNDO ARENAS YATACOAún no hay calificaciones
- Lsca P11 2019BDocumento3 páginasLsca P11 2019BDennys VillavicencioAún no hay calificaciones
- Informe Pid Planta PosicionDocumento5 páginasInforme Pid Planta PosicionJesús Antonio Cubillos ManriqueAún no hay calificaciones
- Deber 6Documento4 páginasDeber 6Kevin TobarAún no hay calificaciones
- TAREA #2. Diseño de CompensadoresDocumento2 páginasTAREA #2. Diseño de CompensadoresELIAN EDMUNDO ARENAS YATACOAún no hay calificaciones
- Es U4Documento28 páginasEs U4Annalisa PorcelliAún no hay calificaciones
- Informe Pid Planta Posicion 2Documento6 páginasInforme Pid Planta Posicion 2Francisco Joven-MunarAún no hay calificaciones
- Tema 6 - Control Analogico de SistemasDocumento109 páginasTema 6 - Control Analogico de SistemasLeonardo MassaAún no hay calificaciones
- Control AnalogoDocumento16 páginasControl Analogoalexavramirez0903Aún no hay calificaciones
- Informe Final Control IiDocumento11 páginasInforme Final Control Iibrayan vilela villegasAún no hay calificaciones
- Lab 2Documento3 páginasLab 2Sebastian VasquezAún no hay calificaciones
- Examen Final Control 1 2021-03Documento1 páginaExamen Final Control 1 2021-03oscar lozanoAún no hay calificaciones
- 1683 0789 Ran 10 03 303Documento15 páginas1683 0789 Ran 10 03 303Franklin Justiniano parapainoAún no hay calificaciones
- DC Motor Ø 24 1.16.011Documento11 páginasDC Motor Ø 24 1.16.011Carlos PerezAún no hay calificaciones
- Proyecto de Motor CDDocumento14 páginasProyecto de Motor CDAlexFernandoAlexParedesAún no hay calificaciones
- Ajuste de Un Controlador Pid PDFDocumento7 páginasAjuste de Un Controlador Pid PDFHugo Hernando Diaz RagaAún no hay calificaciones
- Labo de Control 2 PIDDocumento16 páginasLabo de Control 2 PIDMichael Infantes HuacancaAún no hay calificaciones
- Cap9 CompensacionDocumento43 páginasCap9 CompensacionCelula CarlosAún no hay calificaciones
- Coleccion Problem As CA 3Documento134 páginasColeccion Problem As CA 3Ronny RamírezAún no hay calificaciones
- Diseño de Controladores en El Dominio de La FrecuenciaDocumento23 páginasDiseño de Controladores en El Dominio de La FrecuenciaArturo CMAún no hay calificaciones
- 1er TallerDocumento4 páginas1er TallerJAIRO EDUARDO RAMIREZ ACEROAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Control Ad or de Tiempo Finito (Dead Beat)Documento66 páginasControl Ad or de Tiempo Finito (Dead Beat)Ruben de los SantosAún no hay calificaciones
- Diseño de Controladores Digitales en El Dominio ZDocumento8 páginasDiseño de Controladores Digitales en El Dominio ZJesús AndrésAún no hay calificaciones
- Ejercicios Unidad2 2013 2 PDFDocumento3 páginasEjercicios Unidad2 2013 2 PDFAlejandro Velez SalasAún no hay calificaciones
- PROYFINAL 1 Ing Control Upb 2 - 2021 - TEMPERATURADocumento4 páginasPROYFINAL 1 Ing Control Upb 2 - 2021 - TEMPERATURASantiago Farías CamargoAún no hay calificaciones
- P10 CP-CautomaticoDocumento5 páginasP10 CP-CautomaticoEstalin ChicaizaAún no hay calificaciones
- Control Levitador 3Documento4 páginasControl Levitador 3Rey GussyAún no hay calificaciones
- Experiencia 2 PDFDocumento9 páginasExperiencia 2 PDFDIEGO2Aún no hay calificaciones
- ApprobDocumento6 páginasApprobKhevin Lizano BorreroAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaDe EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaAún no hay calificaciones
- Introducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.De EverandIntroducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.Aún no hay calificaciones
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
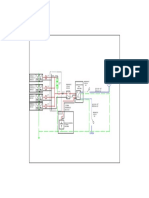
- Unifilar Sistema de BombeoDocumento1 páginaUnifilar Sistema de BombeoAndres OchoaAún no hay calificaciones
- Laboratorio02 2013 1Documento1 páginaLaboratorio02 2013 1Andres OchoaAún no hay calificaciones
- Unifilar 8 Paneles-Presentación1Documento1 páginaUnifilar 8 Paneles-Presentación1Andres OchoaAún no hay calificaciones
- Curso de Capacitacion de Rectificadores Y Circuitos RLCDocumento17 páginasCurso de Capacitacion de Rectificadores Y Circuitos RLCAndres OchoaAún no hay calificaciones
- PatentesDocumento3 páginasPatentesAndres OchoaAún no hay calificaciones
- EjerciciosCM17-2 - Corte1 Repaso Control ClasicoDocumento3 páginasEjerciciosCM17-2 - Corte1 Repaso Control ClasicoAndres OchoaAún no hay calificaciones
- TallerNo - 2 Diseño ElectronicoDocumento2 páginasTallerNo - 2 Diseño ElectronicoAndres OchoaAún no hay calificaciones
- Laboratorio 2 Informe Control VelocidadDocumento6 páginasLaboratorio 2 Informe Control VelocidadAndres OchoaAún no hay calificaciones
- Disi Dent Fun C Transf eDocumento5 páginasDisi Dent Fun C Transf eAndres OchoaAún no hay calificaciones
- Practicas 5 y 6Documento3 páginasPracticas 5 y 6Andres OchoaAún no hay calificaciones
- Laboratorio 1 Informe Control Posicion 1Documento9 páginasLaboratorio 1 Informe Control Posicion 1Andres OchoaAún no hay calificaciones
- Laboratorio 1 Control ModernoDocumento10 páginasLaboratorio 1 Control ModernoAndres OchoaAún no hay calificaciones
- Ejercicio 001-Espacio de EstadosDocumento3 páginasEjercicio 001-Espacio de EstadosAndres OchoaAún no hay calificaciones
- Ejercicio 002-Espacio de EstadosDocumento5 páginasEjercicio 002-Espacio de EstadosAndres OchoaAún no hay calificaciones
- Sistema Numérico Según Los Incas (Semana13-14)Documento9 páginasSistema Numérico Según Los Incas (Semana13-14)AnthonyZamoraAún no hay calificaciones
- El Rol Del Director Del ProyectosDocumento23 páginasEl Rol Del Director Del ProyectosNorman PeñaAún no hay calificaciones
- 3.5. Procedimiento para La Construcción de Obras Por Terceros.Documento11 páginas3.5. Procedimiento para La Construcción de Obras Por Terceros.Eiter Antonio SantiagoAún no hay calificaciones
- Arboles RecorridoDocumento6 páginasArboles RecorridokacrenerAún no hay calificaciones
- Mapa Conceptual Patentes (1) VVVVVVVVDocumento2 páginasMapa Conceptual Patentes (1) VVVVVVVVJorge Isaac Navas100% (1)
- Gestión Social y ConflictividadDocumento3 páginasGestión Social y ConflictividadArmant QGAún no hay calificaciones
- El Gusto en David HumeDocumento10 páginasEl Gusto en David HumeGuillermo Bernabé HernándezAún no hay calificaciones
- Morris. Cap 8 Inteligencia y Capacidades MentalesDocumento23 páginasMorris. Cap 8 Inteligencia y Capacidades MentalesadripvAún no hay calificaciones
- 6to Grado - Bimestre 1Documento10 páginas6to Grado - Bimestre 1Yulenni MejíaAún no hay calificaciones
- Primer Corte. Conceptos Fundamentales de Un Proceso IndustrialDocumento3 páginasPrimer Corte. Conceptos Fundamentales de Un Proceso IndustrialDaniel Amaya100% (1)
- Universidad Central Del Ecuador Facultad de Ciencias Médicas Instituto Superior de Posgrado Postgrado de Cirugía General - PDF FDocumento1 páginaUniversidad Central Del Ecuador Facultad de Ciencias Médicas Instituto Superior de Posgrado Postgrado de Cirugía General - PDF FWilliam HenriAún no hay calificaciones
- Sentido Numérico y Pensamiento AlgebraicoDocumento8 páginasSentido Numérico y Pensamiento AlgebraicoMariano MatamorosAún no hay calificaciones
- Mapa Conceptual Redes 1Documento3 páginasMapa Conceptual Redes 1ErikaPlusAún no hay calificaciones
- Wuolah-Free-Apuntes Del Árbol de La CienciaDocumento11 páginasWuolah-Free-Apuntes Del Árbol de La CienciaFunala PacareAún no hay calificaciones
- S05.s1 - El Lugar de La Entrevista, Uso Del Espacio Físico, Disposición Del Mobiliario y Espacio PersonalDocumento23 páginasS05.s1 - El Lugar de La Entrevista, Uso Del Espacio Físico, Disposición Del Mobiliario y Espacio PersonalIngrid patty Mamani huamaniAún no hay calificaciones
- Equipo de Rayos X Periapical - Manul de UsuarioDocumento23 páginasEquipo de Rayos X Periapical - Manul de UsuarioRobertoCYAún no hay calificaciones
- Celda Hull PresentacionDocumento9 páginasCelda Hull PresentacionAlberto Vázquez CeratiAún no hay calificaciones
- KKV JTVDocumento14 páginasKKV JTVJavier Antonio Torres-VindasAún no hay calificaciones
- GK700 7 Mat - Laboratorio SDocumento62 páginasGK700 7 Mat - Laboratorio SlamejormusicaerestuAún no hay calificaciones
- Sesion Primaria - Leemos El Cuento Sonco y TumiDocumento5 páginasSesion Primaria - Leemos El Cuento Sonco y TumilokokaiserAún no hay calificaciones
- El Metodo de InvestigaDocumento17 páginasEl Metodo de InvestigaT L Jho Jans WellAún no hay calificaciones
- Ciencias de La TierraDocumento103 páginasCiencias de La TierraDavid ValestAún no hay calificaciones
- Eda Vi - Actividad 01Documento2 páginasEda Vi - Actividad 01Deliz UmasiAún no hay calificaciones
- Materiales 23 DPCCDocumento4 páginasMateriales 23 DPCCNeuter TacillaAún no hay calificaciones
- Fernandez Hernandez Arturo 304Documento2 páginasFernandez Hernandez Arturo 304204-Arturo Fernández Hernández.Aún no hay calificaciones
- Jacking Methods1Documento22 páginasJacking Methods1Lina Marcela Vertel GranadosAún no hay calificaciones
- Lenguaje - 6° PAMERDocumento47 páginasLenguaje - 6° PAMERMary Farias Garcia100% (1)
- GG TeamDocumento2 páginasGG TeamFizz EkkoAún no hay calificaciones