También podría gustarte
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- Mantenimiento del sistema de alumbrado y señalización. TMVG0209De EverandMantenimiento del sistema de alumbrado y señalización. TMVG0209Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Tarea 1 Conceptos Previos de ControlDocumento13 páginasTarea 1 Conceptos Previos de ControlKaren RoaAún no hay calificaciones
- Tarea - 1. Conceptos Previos de ControlDocumento13 páginasTarea - 1. Conceptos Previos de ControlClaudio Santiago Condor Diestra100% (1)
- 2T - Instrumentacion y Diagramas PID, v1Documento35 páginas2T - Instrumentacion y Diagramas PID, v1Angie Pilinco CondoriAún no hay calificaciones
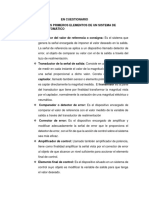
- CUESTIONARIODocumento10 páginasCUESTIONARIOVictor Manuel PAún no hay calificaciones
- Sistema de Control de Temperatura Por Software para Horno EléctricoDocumento6 páginasSistema de Control de Temperatura Por Software para Horno EléctricoMoises PerelloAún no hay calificaciones
- Tarea 2.4 AutoDocumento29 páginasTarea 2.4 AutoAdalberto Mendoza YepesAún no hay calificaciones
- Fase0 12990690Documento9 páginasFase0 12990690cemofe7492Aún no hay calificaciones
- Sensores y ActuadoresDocumento16 páginasSensores y ActuadoresJoseAún no hay calificaciones
- Sistemas de Control DigitalDocumento125 páginasSistemas de Control DigitalmyoshkeuAún no hay calificaciones
- Curso de Sensores e InstrumentaciónDocumento125 páginasCurso de Sensores e Instrumentaciónsupervicdom25Aún no hay calificaciones
- Integracion de Sistemas AutomatizadosDocumento88 páginasIntegracion de Sistemas AutomatizadosXD100% (1)
- Avanse FisicaDocumento9 páginasAvanse FisicaYadhira RomeroAún no hay calificaciones
- Tecnologia de ControlDocumento2 páginasTecnologia de ControlFabricio RomanoAún no hay calificaciones
- Clase AllDocumento122 páginasClase AllGerman Arriaza PugaAún no hay calificaciones
- Consulta2 Elementos ControlDocumento2 páginasConsulta2 Elementos ControlRichard SteevenAún no hay calificaciones
- Tema 1 - IntroduccionDocumento27 páginasTema 1 - IntroduccionmonicajacobodavidAún no hay calificaciones
- Dispositiva Tipos de SensoresDocumento23 páginasDispositiva Tipos de SensoresEDWIN VALVERDE BRAVOAún no hay calificaciones
- Instrumentacion Industrial (Sensores)Documento7 páginasInstrumentacion Industrial (Sensores)Guillermo PlazaAún no hay calificaciones
- INSTRUMENTACIÒNDocumento41 páginasINSTRUMENTACIÒNRikarudo ViruaAún no hay calificaciones
- I2 - Fundamentos - de - Medicion 6444 PDFDocumento15 páginasI2 - Fundamentos - de - Medicion 6444 PDFKenny Arias FerminAún no hay calificaciones
- Introduccion Instrumentacion Industrial EDocumento19 páginasIntroduccion Instrumentacion Industrial EAlicia NarvaezAún no hay calificaciones
- 01-Sistemas Generalizados de Medición PDFDocumento54 páginas01-Sistemas Generalizados de Medición PDFNorman BrancoAún no hay calificaciones
- Introduccion A La Instrumentacion Industrial 2Documento40 páginasIntroduccion A La Instrumentacion Industrial 2gustavoesanchezAún no hay calificaciones
- Diseño de Aplicaciones Controladas Por ComputadorasDocumento238 páginasDiseño de Aplicaciones Controladas Por ComputadorasBertha CruzAún no hay calificaciones
- Semana 3, Clase 01 Clp0 (Sensores)Documento38 páginasSemana 3, Clase 01 Clp0 (Sensores)marxAún no hay calificaciones
- S01 (Generalidades)Documento30 páginasS01 (Generalidades)Valeria Cristina Gonzalez PachecoAún no hay calificaciones
- Control de Control de Procesos Procesos PDFDocumento75 páginasControl de Control de Procesos Procesos PDFjhoel freddy espinoza quispeAún no hay calificaciones
- Procesos Discretos IntroDocumento64 páginasProcesos Discretos IntroMarc CañadaAún no hay calificaciones
- Manual de Sensores y ActuadoresDocumento34 páginasManual de Sensores y Actuadorestony trzAún no hay calificaciones
- Unidad 1 Instrumentos IndustrialesDocumento67 páginasUnidad 1 Instrumentos IndustrialesGabriel Verdesoto YepezAún no hay calificaciones
- Grupo8 Preinf6Documento2 páginasGrupo8 Preinf6Sandra Milena Mejia GarciaAún no hay calificaciones
- DiegoDocumento8 páginasDiegoDIEGO ALAN OLALDE CENTENOAún no hay calificaciones
- Mesa RedondaDocumento4 páginasMesa RedondaJaqueline hernandez cruzAún no hay calificaciones
- Sem 1 Clase 1 RBDocumento28 páginasSem 1 Clase 1 RBLaura SayagoAún no hay calificaciones
- Trabajo de Investigacion N4-ControladoresDocumento14 páginasTrabajo de Investigacion N4-ControladoresjhonnyAún no hay calificaciones
- Simulación PIDDocumento4 páginasSimulación PIDAvtamarlaYadyatAún no hay calificaciones
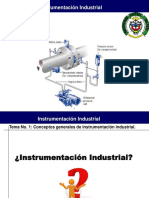
- Tema No. 1 Introduccion A La Instrumentacion InsdustrialDocumento68 páginasTema No. 1 Introduccion A La Instrumentacion Insdustrialfranklin bautistaAún no hay calificaciones
- Instrumentación, ParcialDocumento5 páginasInstrumentación, ParcialEder Doria VillalbaAún no hay calificaciones
- Etapas de Un AutomatismoDocumento31 páginasEtapas de Un AutomatismoFRANCISCO ORTEGA GARZONAún no hay calificaciones
- Glosario de Instrumentación y ControlDocumento11 páginasGlosario de Instrumentación y ControlKeyter Javier CoelloAún no hay calificaciones
- Compuertas LogícasDocumento56 páginasCompuertas LogícasSean Michel Alatorre Villegas100% (1)
- Caracteristicas Sistemas Instrumentacion UnioviDocumento36 páginasCaracteristicas Sistemas Instrumentacion UnioviPaula HurtadoAún no hay calificaciones
- Metrologia Industrial IngDocumento21 páginasMetrologia Industrial IngTomás CamposAún no hay calificaciones
- Grupo1 Prinf6Documento3 páginasGrupo1 Prinf6sebatianAún no hay calificaciones
- Guía N°1 Parte 1 CONTROL DE PROCESOS - Luis Santibáñez AndradeDocumento17 páginasGuía N°1 Parte 1 CONTROL DE PROCESOS - Luis Santibáñez AndradeLuis SantibanezAún no hay calificaciones
- StrsDocumento17 páginasStrsNelson Delgado rojasAún no hay calificaciones
- Proyecto Pendulo InvertidoDocumento13 páginasProyecto Pendulo InvertidoJohn WinchesterAún no hay calificaciones
- Unidad 1.-Objetivos de La InstrumentaciónDocumento44 páginasUnidad 1.-Objetivos de La InstrumentaciónPablo Enrique Pérez Gómez100% (1)
- Sensores y MedidoresDocumento52 páginasSensores y MedidoresAmérico RumínAún no hay calificaciones
- Pregunta 3-Machacuay López ValeriaDocumento4 páginasPregunta 3-Machacuay López ValeriaAnonymous MhuINvODnAún no hay calificaciones
- Caracterización de Un Sensor.Documento19 páginasCaracterización de Un Sensor.Maleny AriassAún no hay calificaciones
- Unidad 09Documento7 páginasUnidad 09Orlando ServiánAún no hay calificaciones
- 1.1 Principios de FuncionamientoDocumento31 páginas1.1 Principios de FuncionamientoJose Alejandro Monje WhiteAún no hay calificaciones
- Controladores Lógicos ProgramablesDocumento36 páginasControladores Lógicos ProgramablesAngel Diaz100% (1)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Control y verificación de productos fabricados. FMEE0108De EverandControl y verificación de productos fabricados. FMEE0108Aún no hay calificaciones
- Tarea3 MillerGarzonDocumento10 páginasTarea3 MillerGarzonMiller GarzonAún no hay calificaciones
- Material EsDocumento14 páginasMaterial EsMiller GarzonAún no hay calificaciones
- Telecontrol NicolasErazoDocumento11 páginasTelecontrol NicolasErazoMiller GarzonAún no hay calificaciones
- Etapa1 Miller GarzonDocumento7 páginasEtapa1 Miller GarzonMiller GarzonAún no hay calificaciones
- Tarea 1 Miller GarzonDocumento6 páginasTarea 1 Miller GarzonMiller GarzonAún no hay calificaciones
- Contrato Natalia Barreto NiñoDocumento5 páginasContrato Natalia Barreto NiñoMiller GarzonAún no hay calificaciones
- ElectricidadDocumento4 páginasElectricidadMiller GarzonAún no hay calificaciones
- Acta Liquidatora Miller Andres Garzon Niño OpsDocumento3 páginasActa Liquidatora Miller Andres Garzon Niño OpsMiller GarzonAún no hay calificaciones
- Carta Seguros La EquidadDocumento4 páginasCarta Seguros La EquidadMiller GarzonAún no hay calificaciones
- Carta Secretaria de Vivienda de AportesDocumento3 páginasCarta Secretaria de Vivienda de AportesMiller GarzonAún no hay calificaciones
- Carta Solicitud PlaneacionDocumento6 páginasCarta Solicitud PlaneacionMiller GarzonAún no hay calificaciones
- Carta ServimendicosDocumento2 páginasCarta ServimendicosMiller GarzonAún no hay calificaciones
- Carta Solicitud Historas ClinicasDocumento11 páginasCarta Solicitud Historas ClinicasMiller GarzonAún no hay calificaciones
- Carta PorvenirDocumento2 páginasCarta PorvenirMiller GarzonAún no hay calificaciones
- Carta Suramericana de SegurosDocumento1 páginaCarta Suramericana de SegurosMiller Garzon100% (1)
- Carta Planeacion MunicipalDocumento2 páginasCarta Planeacion MunicipalMiller GarzonAún no hay calificaciones
- Carta Personeria QuejaDocumento5 páginasCarta Personeria QuejaMiller GarzonAún no hay calificaciones
- Carta Camara de ComercioDocumento3 páginasCarta Camara de ComercioMiller GarzonAún no hay calificaciones
- Carta Planeacion Municipal ParatebuenoDocumento1 páginaCarta Planeacion Municipal ParatebuenoMiller GarzonAún no hay calificaciones
- Carta Banco Agrario..Documento1 páginaCarta Banco Agrario..Miller Garzon0% (1)
- Carta Banco AgrarioDocumento1 páginaCarta Banco AgrarioMiller GarzonAún no hay calificaciones
- Carta Banco Bbva)Documento1 páginaCarta Banco Bbva)Miller Garzon100% (1)
- Carta Banco Agrario 1.Documento2 páginasCarta Banco Agrario 1.Miller GarzonAún no hay calificaciones
- Contrato de CompraventaDocumento2 páginasContrato de CompraventaMiller GarzonAún no hay calificaciones
- Formato de Evaluaciòn de Desempeño Con Indicadores de Gestiòn.Documento3 páginasFormato de Evaluaciòn de Desempeño Con Indicadores de Gestiòn.Maya BlancoAún no hay calificaciones
- DESIGNACION DE CONCILIADOR - Solicitud ExpresaDocumento2 páginasDESIGNACION DE CONCILIADOR - Solicitud ExpresaSilvia Quispe LupacaAún no hay calificaciones
- Práctica 6 Reporte MEDICIONESDocumento16 páginasPráctica 6 Reporte MEDICIONESLizeth Morales50% (2)
- Web 2.0Documento5 páginasWeb 2.0Angie Paola MENDEZ CERVERAAún no hay calificaciones
- Trabajo Eje 3 Herramientas para La Toma de DecisionesDocumento6 páginasTrabajo Eje 3 Herramientas para La Toma de DecisionesAndrea GomezAún no hay calificaciones
- AST 5 Instalacion de Moldajes de MuroDocumento3 páginasAST 5 Instalacion de Moldajes de MuroMatiasAún no hay calificaciones
- Formato Diapositivas ITPDocumento11 páginasFormato Diapositivas ITPMadNNAún no hay calificaciones
- Nicolás de PiérolaDocumento10 páginasNicolás de PiérolacamilanelidarodriguezsalvadorAún no hay calificaciones
- Plan de EmergenciasDocumento11 páginasPlan de EmergenciasJoseParedesOlivosAún no hay calificaciones
- P3 SauxDocumento4 páginasP3 SauxGrecia CervantesAún no hay calificaciones
- Equipos USAR Nivel MedianoDocumento16 páginasEquipos USAR Nivel MedianoPablo VásquezAún no hay calificaciones
- Tarea Base de Datos - Calpa HectorDocumento9 páginasTarea Base de Datos - Calpa HectorAndy CuaicalAún no hay calificaciones
- Ley para Promover y Proteger El Ejercicio de La Libre CompetenciaDocumento11 páginasLey para Promover y Proteger El Ejercicio de La Libre CompetenciaJuan Jose Molina UrbinaAún no hay calificaciones
- Seguridad Informática Conceptos y Buenas PracticasDocumento21 páginasSeguridad Informática Conceptos y Buenas PracticasMrJoel XDAún no hay calificaciones
- Trabajo Practico Grupal El Poder EjecutivoDocumento10 páginasTrabajo Practico Grupal El Poder EjecutivoJuan JoseAún no hay calificaciones
- Recurso de Apelación AdministrativoDocumento15 páginasRecurso de Apelación AdministrativoelvirreAún no hay calificaciones
- NTC 4046 Cal Viva (CaO) para Propósitos Estructurales. Especificaciones PDFDocumento8 páginasNTC 4046 Cal Viva (CaO) para Propósitos Estructurales. Especificaciones PDFAlexander LeguizamoAún no hay calificaciones
- Bullet CatalogoDocumento10 páginasBullet CatalogoFernando GuerraAún no hay calificaciones
- Movimiento de Activos FijosDocumento5 páginasMovimiento de Activos FijosINTERA SASAún no hay calificaciones
- TemarioDocumento75 páginasTemarioJuan VargasAún no hay calificaciones
- Tutoria de EsterilizacionDocumento4 páginasTutoria de EsterilizacionLaura OrozcoAún no hay calificaciones
- Manual de ComputadorasDocumento24 páginasManual de ComputadorasGamaliel Abanto QuirozAún no hay calificaciones
- Plan de mejora Ciencias SocialesDocumento60 páginasPlan de mejora Ciencias SocialesYuddy IsasbelAún no hay calificaciones
- Bases Integ. PECNo 0022020 Superv Tunel Conchano 20201221 193953 822 2Documento55 páginasBases Integ. PECNo 0022020 Superv Tunel Conchano 20201221 193953 822 2César Fustamante BenavidezAún no hay calificaciones
- 3-Unidad 1Documento3 páginas3-Unidad 1marcos langAún no hay calificaciones
- INCAUCADocumento179 páginasINCAUCAJorge MoralesAún no hay calificaciones
- Acta de ConstitucionDocumento10 páginasActa de ConstitucionHugo Raul Flores VenturaAún no hay calificaciones
- Papel Del Contador Publico en Una Empresa AgropeuariaDocumento6 páginasPapel Del Contador Publico en Una Empresa AgropeuariamariaAún no hay calificaciones
- CAP 19 Macroeconomia PDFDocumento7 páginasCAP 19 Macroeconomia PDFJuan David saldarriagaAún no hay calificaciones
- Ion Sobre Bancos en Plaza RRHHDocumento2 páginasIon Sobre Bancos en Plaza RRHHMARCOS GRANADO100% (1)