También podría gustarte
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- Protocolo HartDocumento18 páginasProtocolo HartCarlos Ardila100% (1)
- Protocolo HartDocumento9 páginasProtocolo HartRuth Díaz100% (1)
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- RQ - 346 Especificaciones TecnicasDocumento8 páginasRQ - 346 Especificaciones TecnicasRub PerAún no hay calificaciones
- Tarea U1 S2 Alejandro NuñezDocumento11 páginasTarea U1 S2 Alejandro NuñezAle Nuñezt100% (1)
- Reporte AzeotroposDocumento8 páginasReporte AzeotroposFernanda GómezAún no hay calificaciones
- Protocolos de Comunicación Industrial FinalDocumento31 páginasProtocolos de Comunicación Industrial FinalCarlos BuenAún no hay calificaciones
- Estilos de LiderazgoDocumento6 páginasEstilos de LiderazgoCarlos MinanoAún no hay calificaciones
- BIORREACTORESDocumento72 páginasBIORREACTORESDanitza Pozzi BardalezAún no hay calificaciones
- Solberg FiltrosDocumento57 páginasSolberg Filtroscesarj29Aún no hay calificaciones
- Actividad Sumativa Sem 5Documento9 páginasActividad Sumativa Sem 5Pamela Moscoso RojasAún no hay calificaciones
- Aplicaciones Protocolo HartDocumento15 páginasAplicaciones Protocolo HartGonzhalo Ramireç ChaveçAún no hay calificaciones
- Tendencias en InstrumentacionDocumento55 páginasTendencias en Instrumentaciontanathos18Aún no hay calificaciones
- HartDocumento6 páginasHartHugo ZuñicoAún no hay calificaciones
- Operación y MonitoreoDocumento68 páginasOperación y MonitoreoNelsonAún no hay calificaciones
- 01 Fluke HartDocumento16 páginas01 Fluke HartAlcy Blanco Garcia0% (1)
- Presentacion Bus de Campo HartDocumento20 páginasPresentacion Bus de Campo Hartdavid munozAún no hay calificaciones
- Dispositivos de CampoDocumento7 páginasDispositivos de CampoOriana CulquicondorAún no hay calificaciones
- Instrumentación INTELIGENTEDocumento30 páginasInstrumentación INTELIGENTEpablosky33Aún no hay calificaciones
- Resumen Comunicaciones 4.0Documento6 páginasResumen Comunicaciones 4.0Oscar VelardeAún no hay calificaciones
- Informe de InstrumentacionDocumento9 páginasInforme de InstrumentacionBryan Tello CortesAún no hay calificaciones
- Exposicion HART Protocolo de ComunicacionDocumento7 páginasExposicion HART Protocolo de ComunicacionLogan JobsAún no hay calificaciones
- Comunicacion Serial RS232 y EvaluaciónDocumento22 páginasComunicacion Serial RS232 y EvaluaciónDiego SebastianAún no hay calificaciones
- MonografiaDocumento6 páginasMonografiaCrhistian Gopar RodriguezAún no hay calificaciones
- Trabajo de InstrumentacionDocumento10 páginasTrabajo de Instrumentacionfaber orlandoAún no hay calificaciones
- Práctica 7 PHDocumento8 páginasPráctica 7 PHRamiro Octavio Cuacua FriasAún no hay calificaciones
- TrasmisoresDocumento65 páginasTrasmisoreshelelendidoAún no hay calificaciones
- Comunicacion Industrial EdwinDocumento19 páginasComunicacion Industrial EdwinAlexis Sem BelAún no hay calificaciones
- Ensayo Transmisores - Actividad1Documento5 páginasEnsayo Transmisores - Actividad1Yanina PrietoAún no hay calificaciones
- Informe HARTDocumento7 páginasInforme HARTCristian MosqueraAún no hay calificaciones
- INFORME DE LABORATORIO No 1 TemperaturaDocumento8 páginasINFORME DE LABORATORIO No 1 TemperaturaEduardo PasochoaAún no hay calificaciones
- Acondicionamiento de Señal y ProtocolosDocumento6 páginasAcondicionamiento de Señal y ProtocolosMalom MarquezAún no hay calificaciones
- ConcluDocumento22 páginasConcluEfrain Gonzalez TiradoAún no hay calificaciones
- T4-IyC-5V EHAIDocumento5 páginasT4-IyC-5V EHAIALEXIS IVAN ESCOBEDO HERRERAAún no hay calificaciones
- Investigacion 5 Unidad - Protocolos de Comunicacion IndustrialDocumento29 páginasInvestigacion 5 Unidad - Protocolos de Comunicacion IndustrialCesar Omar Estrada BarojasAún no hay calificaciones
- Introducción A La Automatización IndustrialDocumento8 páginasIntroducción A La Automatización IndustrialHerlan Orellana VillalbaAún no hay calificaciones
- Protocolo de Comunicacion PDFDocumento5 páginasProtocolo de Comunicacion PDFKaren GarciaAún no hay calificaciones
- TransmisoresDocumento22 páginasTransmisoresmarieth ruiz lopezAún no hay calificaciones
- Tarea InstrumDocumento10 páginasTarea InstrumleidyAún no hay calificaciones
- Macromedidores Ultrasonicos de FlujoDocumento7 páginasMacromedidores Ultrasonicos de FlujoYazmin VargasAún no hay calificaciones
- Automatizacion Protocolo HARTDocumento7 páginasAutomatizacion Protocolo HARTNetoAún no hay calificaciones
- TRANSMISORESDocumento18 páginasTRANSMISORESHANNIA GUADALUPE SANCHEZ MARTINEZAún no hay calificaciones
- TrasmisoresDocumento30 páginasTrasmisoreshelelendidoAún no hay calificaciones
- Etapa 1 Valeria L PezDocumento13 páginasEtapa 1 Valeria L PezMiguel Angel Mendigaño ArismendyAún no hay calificaciones
- Control de ProcesosDocumento15 páginasControl de ProcesosCARLOS JOSE CEDEÑOAún no hay calificaciones
- 2 InstrumentaciónDocumento45 páginas2 InstrumentaciónPaul RiveraAún no hay calificaciones
- Trabajo de InvestigacionDocumento6 páginasTrabajo de InvestigacionAndres Castro GarciaAún no hay calificaciones
- Protocolo Hart - Grupo 1Documento12 páginasProtocolo Hart - Grupo 1José RojasAún no hay calificaciones
- Implementacion de Una Red MODBUSTCPDocumento12 páginasImplementacion de Una Red MODBUSTCPZts MksAún no hay calificaciones
- Hamming CodigoDocumento7 páginasHamming CodigoEduardoAún no hay calificaciones
- UntitledDocumento73 páginasUntitledCristian Cueva ChavezAún no hay calificaciones
- CLICAP 2005 - Trabajos Completos 5° ParteDocumento47 páginasCLICAP 2005 - Trabajos Completos 5° Parteshirley_adrianoAún no hay calificaciones
- Redes IndustrialesDocumento20 páginasRedes IndustrialesmarielaAún no hay calificaciones
- An Open-Source and Low-Cost Temperature and Humidity Monitoring System For Laboratory ApplicationsDocumento5 páginasAn Open-Source and Low-Cost Temperature and Humidity Monitoring System For Laboratory ApplicationsSebas 24Aún no hay calificaciones
- Pracctica 1 Integracion A SistemasDocumento7 páginasPracctica 1 Integracion A SistemasJohanan De Jesus Hernandez LopezAún no hay calificaciones
- Guia 3 DiseñoDocumento7 páginasGuia 3 DiseñoLeonardoAún no hay calificaciones
- Protocolos de Comunicaciones AlesDocumento3 páginasProtocolos de Comunicaciones AlesMarco Javier Vera CatalanAún no hay calificaciones
- Protocolos de ComunicaciónDocumento7 páginasProtocolos de Comunicaciónfernado perezAún no hay calificaciones
- Unidad 3 RedesDocumento9 páginasUnidad 3 RedesNestor CoronaAún no hay calificaciones
- Proyecto para Protocolos de ComunicacionDocumento4 páginasProyecto para Protocolos de Comunicacionmario gomez100% (1)
- 2 Creus Resumen TransmisoresDocumento6 páginas2 Creus Resumen TransmisoresjhandryAún no hay calificaciones
- Informe Final Filtros Iir MatlabDocumento13 páginasInforme Final Filtros Iir MatlabNando MontaAún no hay calificaciones
- Protocolos de ComunicacionDocumento28 páginasProtocolos de ComunicacionPatricio MolinaAún no hay calificaciones
- Comunicacion Hart y FieldbusDocumento6 páginasComunicacion Hart y FieldbusCristián AndresAún no hay calificaciones
- Figuras de LichtenbergDocumento4 páginasFiguras de LichtenbergAngel SolórzanoAún no hay calificaciones
- Informe Del TuristaDocumento14 páginasInforme Del Turistastephany sojoAún no hay calificaciones
- 1ero. HIDROGRAMA UNITARIODocumento42 páginas1ero. HIDROGRAMA UNITARIOEdgar CollazosAún no hay calificaciones
- Presentación Capitolio Nacional de ColombiaDocumento10 páginasPresentación Capitolio Nacional de ColombiaSara Elifelet Castellanos MontenegroAún no hay calificaciones
- Septiembre 27 Victoria 2013 DefDocumento25 páginasSeptiembre 27 Victoria 2013 DefPagina web Diario elsigloAún no hay calificaciones
- Módulo de Capacitación: Vigilancia de Indicadores NutricionalesDocumento181 páginasMódulo de Capacitación: Vigilancia de Indicadores NutricionalesMarilu HuaynachoAún no hay calificaciones
- Tarea 2 de Medicion de ConflitosDocumento5 páginasTarea 2 de Medicion de ConflitosAlba MorenoAún no hay calificaciones
- Clases de Salario en VenezuelaDocumento9 páginasClases de Salario en VenezuelaAna GarciaAún no hay calificaciones
- Decreto 1227 Del 2015Documento6 páginasDecreto 1227 Del 2015JESSICA HURTADOAún no hay calificaciones
- El Vuelo Por Instrumentos 1Documento12 páginasEl Vuelo Por Instrumentos 1Epc AlfredAún no hay calificaciones
- Trialectica EspacialDocumento13 páginasTrialectica EspacialMiguel GomezAún no hay calificaciones
- 1° Parcial de Pediatria IIDocumento7 páginas1° Parcial de Pediatria IIjoao paulo oliveiraAún no hay calificaciones
- Trabajo Final - Israel - Francisco - Aproximacion Especulativa A Los MemesDocumento15 páginasTrabajo Final - Israel - Francisco - Aproximacion Especulativa A Los MemesfcoAún no hay calificaciones
- Hip Hop en AdolescentesDocumento1 páginaHip Hop en AdolescentesIsmael GrijalvaAún no hay calificaciones
- Texto Argumentativo (Teoría)Documento3 páginasTexto Argumentativo (Teoría)Carlos López Barona BlacdragoAún no hay calificaciones
- Curso Agil Mod2 Manifiesto Agil 02.10.2017Documento61 páginasCurso Agil Mod2 Manifiesto Agil 02.10.2017Marie IriarteAún no hay calificaciones
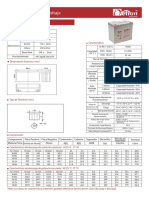
- Batería Gel 150AHDocumento2 páginasBatería Gel 150AHsantiago navarroAún no hay calificaciones
- 3° 4° Semana 2 Actividad 2Documento4 páginas3° 4° Semana 2 Actividad 2mariella castroAún no hay calificaciones
- Producto Integrador Bloque 3Documento4 páginasProducto Integrador Bloque 3Tania Salgado NajeraAún no hay calificaciones
- Siber CatalogoDocumento24 páginasSiber CatalogoJuan Francisco Martinez CortesAún no hay calificaciones
- Ambientes EducativosDocumento12 páginasAmbientes EducativosFrancisca ContrerasAún no hay calificaciones
- Diplomado en Ecografía GeneralDocumento2 páginasDiplomado en Ecografía GeneralUnidad de Apoyo a la Docencia e Investigación del HSJ-CAún no hay calificaciones
- Juego, Recreación y Educación Luciano Mercado Hsa3Documento37 páginasJuego, Recreación y Educación Luciano Mercado Hsa3SebastianRamirezAún no hay calificaciones
- Taller de Cálculo Diferencial Viernes NocheDocumento2 páginasTaller de Cálculo Diferencial Viernes NocheJosé Barros Troncoso100% (1)
- 04 Anteproyecto PRC Cunco 4 PDFDocumento25 páginas04 Anteproyecto PRC Cunco 4 PDFAlekkerAún no hay calificaciones