También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Hace Más de 60 Años NSF International Desarrolló La Primera NormaDocumento2 páginasHace Más de 60 Años NSF International Desarrolló La Primera NormaEdwinSandovalLeonAún no hay calificaciones
- Proyecto Simulador CKP Con RPMDocumento1 páginaProyecto Simulador CKP Con RPMjvazquez501100% (3)
- Ejercicio Obligatorio Feedback - Automatas ProgramablesDocumento11 páginasEjercicio Obligatorio Feedback - Automatas ProgramablesLoli3101100% (3)
- Check List AmoladoraDocumento2 páginasCheck List AmoladoraGERMAN MIRANDAAún no hay calificaciones
- Pract 12 TIA PORTALDocumento11 páginasPract 12 TIA PORTALjuan davidAún no hay calificaciones
- Agente de Retención y de Percepción de La Obligación TributariaDocumento77 páginasAgente de Retención y de Percepción de La Obligación TributariaBryan SalazarAún no hay calificaciones
- Curso Basico PLC Allen BradleyDocumento11 páginasCurso Basico PLC Allen BradleyLuis Rodriguez75% (4)
- Ejercicios Banda TransportadoraDocumento17 páginasEjercicios Banda TransportadoraDavy Fco Piña VAún no hay calificaciones
- Explicacion Del Ejercicio de Riego AutomaticoDocumento20 páginasExplicacion Del Ejercicio de Riego AutomaticoSantiago Cardenas chocceAún no hay calificaciones
- Feedback Automatas ProgramablesDocumento5 páginasFeedback Automatas ProgramablesJorge Coronado100% (1)
- Ejemplos para Pic16f877aDocumento9 páginasEjemplos para Pic16f877aArmando CajahuaringaAún no hay calificaciones
- Kuri, Carlos - INTRODUCCIÓN AL PSICOANÁLISIS PDFDocumento154 páginasKuri, Carlos - INTRODUCCIÓN AL PSICOANÁLISIS PDFLeonardo MolloAún no hay calificaciones
- Estudio de Mecánica de Suelos Con Fines de CimentaciónDocumento17 páginasEstudio de Mecánica de Suelos Con Fines de Cimentaciónimalay0331Aún no hay calificaciones
- Feedback Automatas Programables 22Documento5 páginasFeedback Automatas Programables 22anon_553455468Aún no hay calificaciones
- Control Piscina ArduinoDocumento4 páginasControl Piscina ArduinogabrielAún no hay calificaciones
- Ejemplos de Programación Con PicDocumento42 páginasEjemplos de Programación Con PicFernando GasparAún no hay calificaciones
- Laboratorios CodigosDocumento9 páginasLaboratorios CodigosDavid RochaAún no hay calificaciones
- Timer0 Como Un ContadorDocumento7 páginasTimer0 Como Un ContadorManuel Beltran NoguesAún no hay calificaciones
- Documento Sin Título-1Documento13 páginasDocumento Sin Título-1islamelbou1Aún no hay calificaciones
- T Are A 7 Jesus BecerrilDocumento6 páginasT Are A 7 Jesus BecerriljesusAún no hay calificaciones
- Informe Previo 3 Digitales 1Documento5 páginasInforme Previo 3 Digitales 1CarlosVillavicencioGAún no hay calificaciones
- IMPORTANTE - Ejercicos Resueltos de Microcontroladores-InternetDocumento40 páginasIMPORTANTE - Ejercicos Resueltos de Microcontroladores-InternetElectrónPomodoroAún no hay calificaciones
- Ejemplos Manejo de Interrupciones Múltiples - TMR0Documento5 páginasEjemplos Manejo de Interrupciones Múltiples - TMR0scorpio19Aún no hay calificaciones
- Manejo de Pulsadores PDFDocumento7 páginasManejo de Pulsadores PDFWilson RicardoAún no hay calificaciones
- Manejo de PulsadoresDocumento7 páginasManejo de PulsadoresRoberto Alexander Guaman LaicaAún no hay calificaciones
- Guia Lab - 04Documento8 páginasGuia Lab - 04Angel DikekAún no hay calificaciones
- Circuitodedisparo INFORMEDocumento3 páginasCircuitodedisparo INFORMEClub D. PichotaAún no hay calificaciones
- Gr-2-E ValvulaDocumento19 páginasGr-2-E ValvulaSalvador HuarancaAún no hay calificaciones
- Informe de Diseno de Control de Nivel PaDocumento4 páginasInforme de Diseno de Control de Nivel PaJhefrin IngaAún no hay calificaciones
- CodigoDocumento1 páginaCodigojuanAún no hay calificaciones
- Asignación #1Documento27 páginasAsignación #1Camilo RosalesAún no hay calificaciones
- Introducción Grafcet A ArduinoDocumento47 páginasIntroducción Grafcet A ArduinoFernando Rios CastroAún no hay calificaciones
- Ejercicios PLCDocumento2 páginasEjercicios PLCSEBASTIAN FELIPE CORTES LOPEZAún no hay calificaciones
- Unidad6 Enunciado1 v4Documento8 páginasUnidad6 Enunciado1 v4Mike Alex Herrera DomínguezAún no hay calificaciones
- Taller de Ejercicios Sobre NeumaticaDocumento4 páginasTaller de Ejercicios Sobre NeumaticaAndres PinzonAún no hay calificaciones
- PC4 LaboratorioDocumento10 páginasPC4 LaboratorioEdgar Andres Cevallos RamirezAún no hay calificaciones
- Comportamiento de Pozos Con BESDocumento9 páginasComportamiento de Pozos Con BESErika Lisseth Castillo Castillo100% (1)
- Ejercicio 1Documento5 páginasEjercicio 1ROSAS MONTALVO JESUSAún no hay calificaciones
- Report e GpiDocumento7 páginasReport e GpiVik ValenAún no hay calificaciones
- Proyecto Tia Portal SimulacionDocumento12 páginasProyecto Tia Portal SimulacionYugo sGAún no hay calificaciones
- 555 Temporizador 2023FDocumento22 páginas555 Temporizador 2023FEDITH LOPEZ RAMONAún no hay calificaciones
- MT 233 Control de Procesos Ta3 2018 02Documento6 páginasMT 233 Control de Procesos Ta3 2018 02Alin Eduardo Gabino GarciaAún no hay calificaciones
- Paso 6 CesarDocumento13 páginasPaso 6 CesarSantiago BarónAún no hay calificaciones
- T7 Anti ReboteDocumento3 páginasT7 Anti ReboteAlexis Antonio Valerio LópezAún no hay calificaciones
- Memoria Final ElectronicaDocumento12 páginasMemoria Final ElectronicagaggiaAún no hay calificaciones
- Práctica de Comunicación-Cad-Interrupciones.Documento7 páginasPráctica de Comunicación-Cad-Interrupciones.Jorge Luis Villarreal RosalesAún no hay calificaciones
- Tarea 3 4ta UnidadDocumento6 páginasTarea 3 4ta UnidadOscar Villaescusa RodríguezAún no hay calificaciones
- Controladores LogicosDocumento19 páginasControladores LogicosAlberth AvilaAún no hay calificaciones
- Sulzr Inst1Documento5 páginasSulzr Inst1whiteAún no hay calificaciones
- Taller #1 PDFDocumento9 páginasTaller #1 PDFPaola GarzonAún no hay calificaciones
- Informe Hidráulica y Neumática: Jornada: VespertinoDocumento13 páginasInforme Hidráulica y Neumática: Jornada: VespertinoRonald Ibarra VargasAún no hay calificaciones
- Control Programable de LavadoraDocumento8 páginasControl Programable de LavadoraÁntico le RoixAún no hay calificaciones
- Mejia Serna Said Nayder Examen ResueltoDocumento6 páginasMejia Serna Said Nayder Examen ResueltoNayder MejiaAún no hay calificaciones
- Informe #03 de Control de Motores (Porton, Semaforo y Ascensor)Documento14 páginasInforme #03 de Control de Motores (Porton, Semaforo y Ascensor)Leisy SpitiaAún no hay calificaciones
- Auton Tim Flip-Flop - ElectrDocumento5 páginasAuton Tim Flip-Flop - ElectrgikarojiAún no hay calificaciones
- Trabajo Domiciliario N°2-ELECTROTECNIA 6° Turno Tarde-Prof GentileDocumento5 páginasTrabajo Domiciliario N°2-ELECTROTECNIA 6° Turno Tarde-Prof GentileFacundo RivadeneyraAún no hay calificaciones
- Cisterna Automatizado Con Sesores de Nivel de AguaDocumento4 páginasCisterna Automatizado Con Sesores de Nivel de AguaIpanaque ElvisAún no hay calificaciones
- El64 Grupo 8 Lb2 Negrón Reyes Andy Martín 2021-02Documento17 páginasEl64 Grupo 8 Lb2 Negrón Reyes Andy Martín 2021-02Zkeiik Zaloo AlarconAún no hay calificaciones
- Comparador 555 PDFDocumento11 páginasComparador 555 PDFJesus Ivan Soto LozanoAún no hay calificaciones
- Fase4 CarlosGuerrero 5 Aporte2Documento10 páginasFase4 CarlosGuerrero 5 Aporte2nestorbiomedicoAún no hay calificaciones
- Informe Previo 1 Labo de Circuitos Digitales 2Documento16 páginasInforme Previo 1 Labo de Circuitos Digitales 2R Jean Pierre OCAún no hay calificaciones
- A3III Panel de ControlDocumento9 páginasA3III Panel de ControlRoque PeñaAún no hay calificaciones
- Semaforo Con Pic16f887Documento8 páginasSemaforo Con Pic16f887Alexandro Torres100% (1)
- 2021 - Primer Parcial - Segundo Cuatrimestre - TEMA 2Documento5 páginas2021 - Primer Parcial - Segundo Cuatrimestre - TEMA 2Lucas GarbarinoAún no hay calificaciones
- TP - Confiabilidad de Óptica A LEDs para SemáforoDocumento15 páginasTP - Confiabilidad de Óptica A LEDs para SemáforoLucas GarbarinoAún no hay calificaciones
- 2021 - Primer Parcial - Segundo Cuatrimestre - TEMA 1Documento5 páginas2021 - Primer Parcial - Segundo Cuatrimestre - TEMA 1Lucas GarbarinoAún no hay calificaciones
- Informe Final - Estación Meteorológica AutomáticaDocumento62 páginasInforme Final - Estación Meteorológica AutomáticaLucas GarbarinoAún no hay calificaciones
- Código Fuente - Estación Meteorológica AutomáticaDocumento52 páginasCódigo Fuente - Estación Meteorológica AutomáticaLucas GarbarinoAún no hay calificaciones
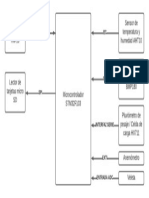
- Diagrama en Bloques - Estación Meteorológica AutomáticaDocumento1 páginaDiagrama en Bloques - Estación Meteorológica AutomáticaLucas GarbarinoAún no hay calificaciones
- Trabajo Práctico N°2 - Electrónica II - Módulo 2Documento25 páginasTrabajo Práctico N°2 - Electrónica II - Módulo 2Lucas GarbarinoAún no hay calificaciones
- Informe Final - Proyecto Digitales IIDocumento45 páginasInforme Final - Proyecto Digitales IILucas GarbarinoAún no hay calificaciones
- Trabajo Práctico N°2 - Electrónica II - Módulo 1Documento19 páginasTrabajo Práctico N°2 - Electrónica II - Módulo 1Lucas GarbarinoAún no hay calificaciones
- Guia de Ejercicios - TC IIDocumento69 páginasGuia de Ejercicios - TC IILucas GarbarinoAún no hay calificaciones
- Triptico ComisionistasDocumento50 páginasTriptico ComisionistasDiego ZeballosAún no hay calificaciones
- RABITODocumento2 páginasRABITOfredmusividaAún no hay calificaciones
- 2° 1° Cuatrimestre - SotoDocumento5 páginas2° 1° Cuatrimestre - SotoLucas Soto100% (2)
- Guia 2. Nutricion en Hongos y Vegetales PDFDocumento3 páginasGuia 2. Nutricion en Hongos y Vegetales PDFtoxico ytAún no hay calificaciones
- CursoVB11 PDFDocumento25 páginasCursoVB11 PDFAlberto Saul Rivero PlazaAún no hay calificaciones
- Informe Nr°1 - Identificacion Del PH - Grupo 3Documento5 páginasInforme Nr°1 - Identificacion Del PH - Grupo 3Joisi ManobandaAún no hay calificaciones
- Siete Pasos en La Vida ConsagradaDocumento2 páginasSiete Pasos en La Vida ConsagradaLUISAún no hay calificaciones
- Validación de La Prueba HIV para El Diagnóstico de VIH Luis AngelDocumento48 páginasValidación de La Prueba HIV para El Diagnóstico de VIH Luis AngelElizabeth CollinsAún no hay calificaciones
- Objetivos MedevacDocumento3 páginasObjetivos Medevacmaricela cruzAún no hay calificaciones
- Guia3 Divisibilidad AritmeticaModularDocumento5 páginasGuia3 Divisibilidad AritmeticaModularMatAún no hay calificaciones
- Teoría de Las Relaciones HumanasDocumento4 páginasTeoría de Las Relaciones HumanasCamila TorresAún no hay calificaciones
- Existencialismo y VideojuegosDocumento3 páginasExistencialismo y VideojuegosJuan DiazAún no hay calificaciones
- TesisDocumento200 páginasTesisJAVIERAún no hay calificaciones
- Constituciones Del PeruDocumento26 páginasConstituciones Del PerukenjitroncosAún no hay calificaciones
- Tesis Impresion CeramicaDocumento92 páginasTesis Impresion CeramicaVictor TufinioAún no hay calificaciones
- Los ProfetasDocumento9 páginasLos ProfetasInfancia MisioneraAún no hay calificaciones
- 50 Ejemplos de Asombro, Duda y Situaciones LímiteDocumento6 páginas50 Ejemplos de Asombro, Duda y Situaciones LímiteValeria Romina GalarzaAún no hay calificaciones
- RIBET 30 Enero-Junio 2020Documento111 páginasRIBET 30 Enero-Junio 2020Edgar ValenciaAún no hay calificaciones
- Informe Mantenimeinto de Obras CivilesDocumento7 páginasInforme Mantenimeinto de Obras CivilesAylín Colina JordánAún no hay calificaciones
- Hemorragia CerebralDocumento29 páginasHemorragia CerebralRuth Aseret Gallegos PerroniAún no hay calificaciones
- Ecuación ContableDocumento16 páginasEcuación ContableMickyAún no hay calificaciones
- Silabo Pediatria 2015Documento64 páginasSilabo Pediatria 2015Oscar Contreras RomeroAún no hay calificaciones
- Deformacion PlasticaDocumento11 páginasDeformacion PlasticarichardAún no hay calificaciones
- Linea TiempoDocumento1 páginaLinea TiempoMonica Munoz HAún no hay calificaciones
- Plan de Estudios Bachillerato Filosofía 9-11Documento15 páginasPlan de Estudios Bachillerato Filosofía 9-11Alexander HernándezAún no hay calificaciones