También podría gustarte
- Resumen PIDDocumento5 páginasResumen PIDFrancisco CaneloAún no hay calificaciones
- Resumen P, I, D - Lo Justo y Necesario Que Debes Saber (Y Que Nunca Entendiste)Documento4 páginasResumen P, I, D - Lo Justo y Necesario Que Debes Saber (Y Que Nunca Entendiste)Richard FerragutAún no hay calificaciones
- Control TEC PID Ecuaciones SintonizacionDocumento14 páginasControl TEC PID Ecuaciones SintonizacionAlexis TraperoAún no hay calificaciones
- PID Practica 5Documento6 páginasPID Practica 5Ramon BalbuenaAún no hay calificaciones
- IyCnet Controladores PID Resumen FinalDocumento8 páginasIyCnet Controladores PID Resumen Finalroque valeraAún no hay calificaciones
- Control PI, PD y PID: Sesión 07Documento38 páginasControl PI, PD y PID: Sesión 07Ilder Juan Ticona MamaniAún no hay calificaciones
- Conceptos Basicos de Control PidDocumento7 páginasConceptos Basicos de Control PidSergioAún no hay calificaciones
- ControlDocumento21 páginasControlMaría CastañedaAún no hay calificaciones
- PID SimplexDocumento19 páginasPID SimplexBenjamin FonsecaAún no hay calificaciones
- Angela Serrano Sars CONTROLADORES P, I, D, PIDDocumento4 páginasAngela Serrano Sars CONTROLADORES P, I, D, PIDSinahi ScAún no hay calificaciones
- Tipos de ControladoresDocumento8 páginasTipos de ControladoresKathya Cano PeraltaAún no hay calificaciones
- Control PDDocumento18 páginasControl PDsandimaAún no hay calificaciones
- Control Proporcional IntegralDocumento31 páginasControl Proporcional IntegralFernando Ramírez100% (1)
- 4.2 Modos de Control Aplicados en InstrumentaciónDocumento19 páginas4.2 Modos de Control Aplicados en InstrumentaciónMartin GomezAún no hay calificaciones
- Proporcional Integral DerivativoDocumento14 páginasProporcional Integral DerivativoAldo SolisAún no hay calificaciones
- Algoritmo de ControlDocumento46 páginasAlgoritmo de Controlankatu05Aún no hay calificaciones
- Instru S16Documento28 páginasInstru S16Jose Antonio Fernandez GoicocheaAún no hay calificaciones
- PID2Documento42 páginasPID2Kevin LopezAún no hay calificaciones
- Elementos de Un Sistema de ControlDocumento15 páginasElementos de Un Sistema de ControlfranciscodavidgonzalezperezAún no hay calificaciones
- Tipos de CONTROLDocumento17 páginasTipos de CONTROLsalmafloresmarquezAún no hay calificaciones
- Controladores PIDDocumento19 páginasControladores PIDdanielAún no hay calificaciones
- Tarea: Sistemas de Control P, Pi Y PidDocumento9 páginasTarea: Sistemas de Control P, Pi Y PidMoises Eliezer Rivera MendezAún no hay calificaciones
- El Tiempo o Tiempo InstantáneoDocumento4 páginasEl Tiempo o Tiempo InstantáneoOSMAR JOSE HENRIQUEZ.QAún no hay calificaciones
- Informe Proyecto Final Teoria de Control IDocumento9 páginasInforme Proyecto Final Teoria de Control IFanny FloresAún no hay calificaciones
- Principio Del Control DerivativoDocumento7 páginasPrincipio Del Control DerivativoFrancisco GalindoAún no hay calificaciones
- Selección de Sistemas de ControlDocumento2 páginasSelección de Sistemas de ControlSting Marquez VargasAún no hay calificaciones
- P9 ICI Hernandez Gonzalez Karla Alejandra Ju1416Documento6 páginasP9 ICI Hernandez Gonzalez Karla Alejandra Ju1416Arthur Santiago TostadoAún no hay calificaciones
- Acciones de ControlDocumento55 páginasAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- Reporte 8 IntegralDocumento16 páginasReporte 8 IntegralDavid HernandezAún no hay calificaciones
- Cap 02Documento57 páginasCap 02enmanuel fernandezAún no hay calificaciones
- Control PDDocumento9 páginasControl PDVicmanAún no hay calificaciones
- Trabajo PIDDocumento25 páginasTrabajo PIDVictor Farias GuerreroAún no hay calificaciones
- ControladoresDocumento15 páginasControladoresAntony TorrezAún no hay calificaciones
- 7 Tipos de Control y SintoníaDocumento13 páginas7 Tipos de Control y SintoníaGustavo CasasAún no hay calificaciones
- Modo de Control Proporcional - InvestigacionDocumento5 páginasModo de Control Proporcional - InvestigacionDaniel GSAún no hay calificaciones
- Saber 2 SistemasDocumento15 páginasSaber 2 SistemasEDSON MISAEL RODR�GUEZ GARC�AAún no hay calificaciones
- Cuadro Comparativo TEORIA DE CONTROLDocumento4 páginasCuadro Comparativo TEORIA DE CONTROLRomanAún no hay calificaciones
- Control AdoresDocumento16 páginasControl AdoresOnfireF SAún no hay calificaciones
- Exposicion Unidad 4Documento31 páginasExposicion Unidad 4Rigoberto Alonso conderAún no hay calificaciones
- Control Proporcional IntegralDocumento6 páginasControl Proporcional Integralfredery garciaAún no hay calificaciones
- IyCdPdPM PMQ-2022I L4Documento4 páginasIyCdPdPM PMQ-2022I L4ALEXANDRA CENTENO GALLEGOSAún no hay calificaciones
- CONCEPTOS BASICOS DE CONTROL P, PI, PID y OtrosDocumento8 páginasCONCEPTOS BASICOS DE CONTROL P, PI, PID y OtrosViktOr GarciaAún no hay calificaciones
- Control ProporcionalDocumento6 páginasControl ProporcionalRoberth Martinez HaroAún no hay calificaciones
- 3.4 Control de ProcesosDocumento24 páginas3.4 Control de ProcesosgiusseppeAún no hay calificaciones
- Conoce C Mo Funciona El Control PID 1666308779Documento14 páginasConoce C Mo Funciona El Control PID 1666308779Franz Huanay MartínezAún no hay calificaciones
- Amadeo Paco Huanca U4 (Controladores)Documento10 páginasAmadeo Paco Huanca U4 (Controladores)Jorge Eduardo Rojas EffengAún no hay calificaciones
- 10 PidDocumento26 páginas10 PidTona Glez Herrera100% (1)
- 2 Pid CFW08Documento23 páginas2 Pid CFW08JJGAún no hay calificaciones
- Controlador P, I y PIDocumento14 páginasControlador P, I y PIRonaldo FontalvoAún no hay calificaciones
- PID - MijailDocumento9 páginasPID - MijailAlex GonzalesAún no hay calificaciones
- Cuestionario Diagnóstico PIDDocumento2 páginasCuestionario Diagnóstico PIDAndré HinojosaAún no hay calificaciones
- Control ProporcionalDocumento13 páginasControl ProporcionalPlinio SuarezAún no hay calificaciones
- Metodologia SCDBDocumento5 páginasMetodologia SCDBBryan CruzAún no hay calificaciones
- Ajuste de ControladoresDocumento9 páginasAjuste de Controladoresernesto mercietAún no hay calificaciones
- Informe PIDDocumento6 páginasInforme PIDKenia A CqAún no hay calificaciones
- 0 Sistemas de ControlDocumento48 páginas0 Sistemas de ControlCristian Martinez RamirezAún no hay calificaciones
- ControladoresDocumento5 páginasControladoresLilian EsquetiAún no hay calificaciones
- Elementos de Un Sistema de ControlDocumento4 páginasElementos de Un Sistema de ControlskailarkkkAún no hay calificaciones
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaDe EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaAún no hay calificaciones
- Ejemplos de Tipos de FabricaciónDocumento5 páginasEjemplos de Tipos de Fabricacióndavid_voca3Aún no hay calificaciones
- Cuestionario Laboratorio 1Documento4 páginasCuestionario Laboratorio 1LUIS FERNANDO CASTILLO CABANA100% (1)
- Síntesis de Pruebas de La Existencia de Dios.Documento26 páginasSíntesis de Pruebas de La Existencia de Dios.Julian TorresAún no hay calificaciones
- AlgebraDocumento2 páginasAlgebraCristian Joaquin ZegarraAún no hay calificaciones
- Walmart Marketing IntegradoDocumento28 páginasWalmart Marketing IntegradoMaria Paula GarcíaAún no hay calificaciones
- Engrase Poberaj SaDocumento25 páginasEngrase Poberaj Sajoroma58Aún no hay calificaciones
- Valvula de Compuerta #1500Documento3 páginasValvula de Compuerta #1500Fa Ch100% (1)
- Cuadro SinópticoDocumento15 páginasCuadro SinópticoZoila CuáAún no hay calificaciones
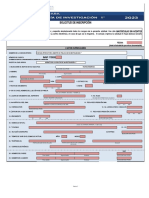
- Solicitud de Inscripcion API 102023Documento36 páginasSolicitud de Inscripcion API 102023luis perezAún no hay calificaciones
- Informe Laboratorio de Fisica Virtual 4 PDFDocumento4 páginasInforme Laboratorio de Fisica Virtual 4 PDFJuan David Arce MartinezAún no hay calificaciones
- Introducción A La SA de ProcesosDocumento25 páginasIntroducción A La SA de ProcesosMaicol Andreth Murcia SanchezAún no hay calificaciones
- Diccionario Educativo PDFDocumento2 páginasDiccionario Educativo PDFMiriamAún no hay calificaciones
- Rea 06finalDocumento9 páginasRea 06finalDavid FAún no hay calificaciones
- Recursos Renovables y No RenovablesDocumento3 páginasRecursos Renovables y No Renovablesvicenteayala32Aún no hay calificaciones
- Triptico Trastorno de PersonalidadDocumento3 páginasTriptico Trastorno de PersonalidadAnghy Vega Rojas67% (3)
- Tolerancia y HospitalidadDocumento3 páginasTolerancia y HospitalidadPaz ArroyoAún no hay calificaciones
- Ejercicios Interés Simple (1 A 3 y 12 A 16)Documento8 páginasEjercicios Interés Simple (1 A 3 y 12 A 16)Noel Suarez100% (1)
- Actividad Entregable 02 Lenguaje y ComunicacionDocumento5 páginasActividad Entregable 02 Lenguaje y ComunicacionJesús LeguiaAún no hay calificaciones
- Razonamiento Verbal - UNMSMDocumento8 páginasRazonamiento Verbal - UNMSMLuis Alberto Mendoza Salas100% (1)
- Informe Deteccion de FallasDocumento17 páginasInforme Deteccion de FallasPablo LópezAún no hay calificaciones
- Parciales - Análisis de Circuitos I (1) UNIVERSIDAD DISTRITAL PDFDocumento5 páginasParciales - Análisis de Circuitos I (1) UNIVERSIDAD DISTRITAL PDFDeiVy GutierrezAún no hay calificaciones
- Caso GISA y Tacos Bell 2Documento7 páginasCaso GISA y Tacos Bell 2Marcia Esparza CancinoAún no hay calificaciones
- Informatica - Medidas de Seguridad e HigieneDocumento4 páginasInformatica - Medidas de Seguridad e HigieneAPOLINAR PAULINO SEBASTIANAún no hay calificaciones
- Municipio Santa Ana EJEMPLODocumento115 páginasMunicipio Santa Ana EJEMPLOwromana74Aún no hay calificaciones
- Papiroflexia y OrigamiDocumento3 páginasPapiroflexia y OrigamiSamantha Mayte Ardiano GomezAún no hay calificaciones
- Gestion de La Calidad 3Documento66 páginasGestion de La Calidad 3RolingAún no hay calificaciones
- Preparacion de Medios de Cultivo y Tecnica de SiembraDocumento14 páginasPreparacion de Medios de Cultivo y Tecnica de SiembraKevin Flores60% (5)
- TL - Mogollon AbadLaydyDocumento53 páginasTL - Mogollon AbadLaydyelyzabeth urbanoAún no hay calificaciones
- Informe Final PDFDocumento15 páginasInforme Final PDFJonathan Guevara RoblesAún no hay calificaciones
- La Tradicion RenovadoraDocumento5 páginasLa Tradicion RenovadoraFABIOLA CISNEROS LOPEZAún no hay calificaciones